







 本文详细介绍了在DJI PSDK开发中如何实现时间同步功能,以解决负载设备时间误差问题并提高定位精度。内容包括PPS信号检测、时间同步初始化与注册、功能测试及注意事项,特别强调了树莓派上PPS信号检测的实现和可能遇到的问题及解决方案。
本文详细介绍了在DJI PSDK开发中如何实现时间同步功能,以解决负载设备时间误差问题并提高定位精度。内容包括PPS信号检测、时间同步初始化与注册、功能测试及注意事项,特别强调了树莓派上PPS信号检测的实现和可能遇到的问题及解决方案。
时间同步用于消除负载设备与无人机系统的时钟差,同步负载设备和无人机的时间。具有“时间同步”功能的负载设备,能够方便用户顺利地使用日志排查无人机飞行过程中的各类故障、分析传感器采样的数据以及获取精准的定位信息等功能。
多数情况下,我们的负载不联网且无时钟源时,日志记录时间与真实时间有较大的误差,通过时间同步功能来设置负载设备本地时间。
另外,在定位应用中需要获取负载设备的精准定位结果,也需要使用时间同步功能。
1、时间同步
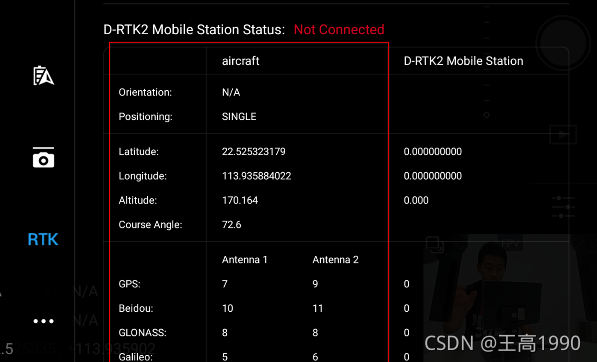
使用时间同步功能前,必须确认无人机与RTK 卫星间保持良好的通信状态,可以通过Pilot 或者 基于MSDK开发的移动APP查看卫星通信状态。
- 负载设备上电后进行初始化时间同步功能,接收无人机发送的PPS硬件脉冲信号。
- 负载设备检测PPS信号上升沿时,记载负载设备上的本地时间
- PSDK底层处理程序获取与PPS信号同步的无人机系统上的时间时间
- PSDK底层处理程序计算负载设备本地时间与无人机系统时间的时钟差
- 负载设备通过接口函数将负载时间转换为无人机时间(利用时钟差&#x

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 7489
7489

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











