







 本文详细介绍Processing与Arduino通过串口进行数据交换的方法,涵盖从基础串口编程到复杂项目如声音传感器读取、彩色LED控制及摇杆操作坦克等实践案例。
本文详细介绍Processing与Arduino通过串口进行数据交换的方法,涵盖从基础串口编程到复杂项目如声音传感器读取、彩色LED控制及摇杆操作坦克等实践案例。
文章目录
- **Processing串口编程**
- **Processing向串口发送数据**
- **Arduino从串口输出字符**
- **在Processing界面上画一个矩形,当用鼠标单击矩形内的时候,Arduino板载的LED灯(13引脚)点亮,单击矩形外的时候,Arduino板载的LED灯熄灭。**
- **在arduino上接一个开关,长按开关,processing的绘制的圆形会变成红色;松开开关,processing上的圆变成绿色。初始为绿色。**
- **实现arduino与processing双向收发**
- **Arduino读取声音传感器**
- **Processing绘制振动条**
- **声音振幅的显示**
- **旋转编码器控制播放音乐**
- **Processing读取音乐文件用arduino调节音量大小**
- **跟随环境光变化的太阳**
- **Arduino读取超声波传感器**
- **Processing绘制距离与提示**
- **根据该距离值与墙的距离绘制电动车。超声波测距传感器读取的数值大,则电动车离墙的距离远,读取的数值小,则电动车离墙的距离近。**
- **控制彩色LED灯**
- **Processing进度条控制**
- **Processing调节彩色LED灯**
- **遥感控制坦克**
- **Processing绘制坦克和键盘控制移动**
- **摇杆控制坦克移动**
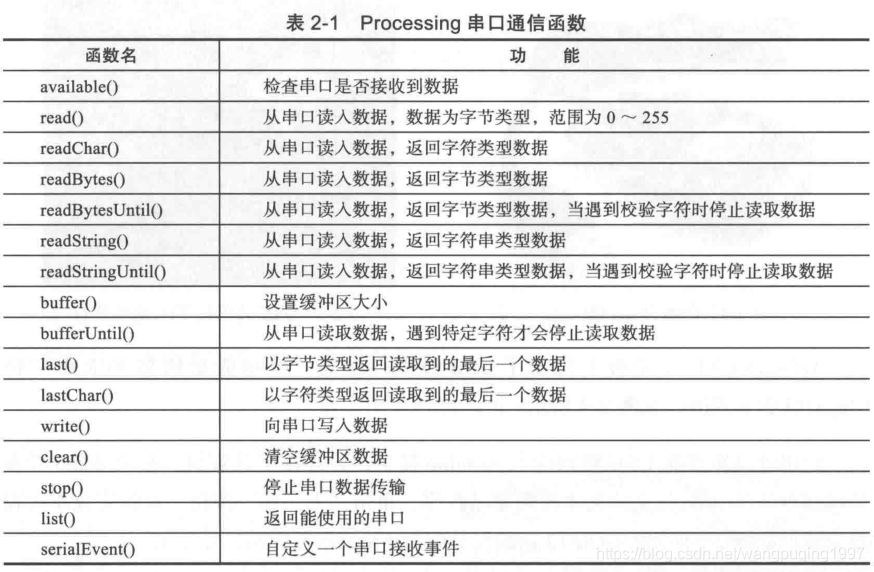
Processing串口编程
Processng的串口通信是由serial库提供的,可以通过调用成员函数来实现。
在processing中输入以下程序:
import processing.serial.*;
Serial myPort;
void setup()
{
size(400,400);
}
void draw()
{
println(Serial.list());
}
显示端口的串口号
Processing向串口发送数据
import processing.serial.*; //导入serial库
Serial port; //实例化一个Serial对象
String message;
void setup()
{
message ="c";
port =new Serial(this,"COM3",9600); //初始化port,第二个参数是端口号,第三个参数是比特率
}
void draw()
{
port.write(message); //发送数据
}
执行程序后Arduino板子上的RX灯一直亮起,数据不断发送,中断程序,RX灯熄灭。

Arduino串口编程

Arduino从串口输出字符
int c= 0;
void setup()
{
Serial.begin(9600);//比特率9600
}
void loop()
{
if(Serial.available())
{
c= Serial.read();
Serial.print("hello word:");
Serial.println(c,DEC);
}
delay(200);
}
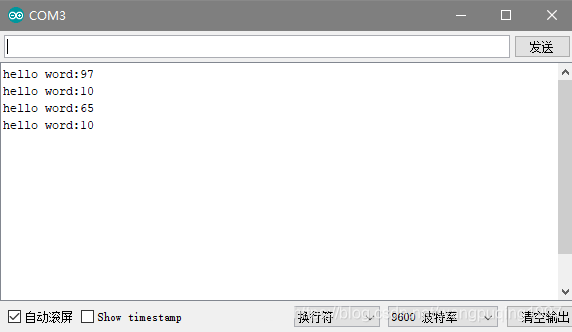
从串口监视器里输入任意字符,单片机会接收到返回该字符的ASCII码。
在Processing界面上画一个矩形,当用鼠标单击矩形内的时候,Arduino板载的LED灯(13引脚)点亮,单击矩形外的时候,Arduino板载的LED灯熄灭。
processing代码
import processing.serial.*;
Serial port;
void setup()
{
port =new Serial(this,"COM3",9600);
size(400,400);
}
void draw()
{
background(125);
fill(255);
rect(100,100,50,50);
}
void mouseClicked()
{
if((mouseX>=100)&(mouseX<=150)&(mouseY>=100&mouseY<=150))
{
println("LED turn ON!");
port.write("a");
}
else
{
println("LED trun OFF!");
port.write("b");
}
}
arduino代码
int c =0;
void setup()
{
Serial.begin(9600); //比特率9600
pinMode(13,OUTPUT); //设置数字引脚第13引脚为输出模式
digitalWrite(13,LOW);//设置该引脚的初始值为低电平
}
void loop()
{
if(Serial.available())
{
c=Serial.read();
if(c==97) //收到字母a,相当于97
digitalWrite(13,HIGH); //LED亮
else
if(c==98) //收到字母b,相当于98
digitalWrite(13,LOW);//LED灭
}
}
在arduino上接一个开关,长按开关,processing的绘制的圆形会变成红色;松开开关,processing上的圆变成绿色。初始为绿色。
processing代码
import processing.serial.*; //导入serial库
Serial myPort; //实例化Serial对象
void setup()
{
size(300,300);
ellipse(100,100,100,100);
myPort =new Serial(this,"COM3",9600); //初始化myport(根据Arduino分配的端口号填写)
}
void draw()
{
while(myPort.available()>0) //监听端口
{
char inByte =myPort.readChar();//读取字节
println(inByte); //显示接收到的字节
switch(inByte)
{
case 'a': //当接收的字母为a时填充红色
fill(0,255,0);
ellipse(100,100,100,100);//重新绘圆
break;
case 'b':
fill(255,0,0); //当接收到的字母为b时填充绿色
ellipse(100,100,100,100);
default:break;
}
}
}
arduino代码
boolean button; //定义布尔类型变量
void setup()
{
button =false;//初始值为false
pinMode(8,INPUT);//定义8引脚为输入模式
Serial.begin(9600);//设置比特率为9600bps
}
void loop()
{
button =digitalRead(8);//读取第8引脚
if(button)
{
Serial.write("a");//读到高电平发送‘a’
}
else
{
Serial.write("b");//读到低电平发送‘b’
}
}
按下开关后:
实现arduino与processing双向收发
processing代码
import processing.serial.*; //导入serial库
Serial myPort; //实例化一个Serial对象
int lf=10; //换行符号的ASCII码值
String myString =null; //定义一个字符串变量
void setup()
{
size(300,300);
background(125);
myPort =new Serial(this,"COM3",9600);
myPort.clear();
}
void draw()
{
rect(100,100,50,50);
while(myPort.available()>0) //监听端口
{
myString = myPort.readStringUntil(lf);//读字符串,直到出现换行符后,将字符串赋值给myString变量
if(myString!=null)
{
background(125); //清空屏幕
text(myString,10,30); //灯光开启,关闭提示显示屏幕左上角
}
}
}
void mouseClicked()
{
if((mouseX>=100)&(mouseX<=150)&(mouseY>=100)&(mouseY<=150)) //鼠标在矩形区域内单机时
{
myPort.write("a"); //往串口发送a
}
else
{
myPort.write("b");//发送b
}
}
arduino代码
int c= 0;
void setup()
{
Serial.begin(9600); //比特率9600
pinMode(13,OUTPUT); //设置数字引脚第13脚为输出模式
digitalWrite(13,LOW);//设置该引脚的初始值为低电平
}
void loop()
{
if(Serial.available())
{
c=Serial.read();
if(c==97) //如果收到字母a(ASCII码值为97)
{
digitalWrite(13,HIGH);//第13引脚置为高电平,LED灯亮
Serial.println("Light turn ON");//向着Processing发送灯已开启的字符串,结尾处有换行符
}
else
{
if(c==98) //接收到字母b
{
digitalWrite(13,LOW);//第13引脚置为高电平,LED灯亮
Serial.println("Light turn OFF");//向Processing发送灯灭的字符串
}
}
}
}

readStringUntil()函数能一直读取字符串,直到出现事先约定好的中指符号,使用该函数能完整的读取整个字符串。若使用readString()函数则可能会出现读不到完整的字符串,或者只读一半的情况。
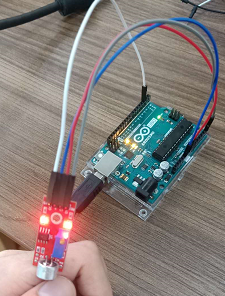
Arduino读取声音传感器
声音传感器的模拟输出A0可实时输出麦克风的电压信号,数字输出口D0相当于一个开关,在没有声音或者声音较弱的时候,输出低电平,当声音强度到达一个阀值(可通过调节电位器来改变)时,才输出高电平。
Arduino代码:
int sensorPin =A5; //模拟5输入端口
int DigitalInput =2;//数字2输入端口
int LEDPin =13; //LED显示端口
int sensorValue =0; //声音值变量
boolean threshold;
void setup()
{
pinMode(sensorPin,INPUT);
pinMode(DigitalInput, INPUT);
pinMode(LEDPin,OUTPUT);
Serial.begin(9600);
}
void loop()
{
sensorValue =analogRead(sensorPin); //读声音传感器的值
threshold =digitalRead(DigitalInput);
if(threshold)
{
digitalWrite(LEDPin,HIGH); //大于阈值灯亮
}
else
{
digitalWrite(LEDPin,LOW); //小于阈值灯灭
delay(50);
Serial.println(sensorValue,DEC); //以十进制的形式输出声音值
}
}
Processing绘制振动条
通过改变正弦曲线的振幅和相位,就能显示出振动条的效果。
正弦曲线表达式:
y = A*sin(x+f)+b
A:曲线的振幅
x:横坐标上的变量
f:相位
b:纵坐标上的初始位置
processing代码
float offset =100; //正弦曲线零点向y轴移动的值
float scaleVal =35; //曲线振幅
float angleInc =PI/60; //角速度,控制曲线的正弦周期
float angle =0;
float dx =0; //x轴的偏移量
void setup()
{
size(600,200);
noStroke();
}
void draw()
{
background(204);
fill(0);
for(int posx =0;posx<=width;posx++)//从左向右,每次加一个单位直到画面的右边
{
float posy =offset+(sin(angle-dx)*scaleVal); //求出曲线的下,y坐标
rect(posx,posy,1,1); //画出该点
angle+=angleInc; //角速度增加,控制曲线的正弦周期
}
dx+=0.05; //改变曲线的相位,值越小曲线运动越慢
angle=0; //重置角度
}
声音振幅的显示
Arduino 读取声音传感器的数值,通过串口传给Processing。Processing将读取到的数据转化为曲线的振幅。
Processing代码:
import processing.serial.*; //导入Serial库
Serial myPort; //实例化一个Serial对象
public static final char HEADER ='h'; //从串口读取信息的第一个字符的效验符
public static final short LF =10; //每次从串口读取信息的长度
float vol; //音量变量
float offset =100; //正弦曲线零点向y轴移动的值
float scaleVal =35; //曲线振幅
float angleInc =PI/60; //角速度,控制曲线的正弦周期
float angle =0;
float dx =0; //x轴的偏移量
float under; //振幅的最小量
float high =200; //音量的最大值
String [] com;
void setup()
{
println(Serial.list()); //获取当前可用串口列表,并保存到com中
com =Serial.list();
myPort =new Serial(this,com[1],9600); //初始化myPort,读取第一个可用串口,串口比特率为9600
myPort.bufferUntil('\n'); //从串口读取数据时遇到换行符则结束读取
size(600,200);
noStroke();
frameRate(60);
}
void draw()
{
scaleVal =map(vol,under,high,0,90); //将音量从范围为under~high插值到0~90
background(204);
fill(255,0,0);
rect(20,20,20,20); //绘制一个矩形,当鼠标单击它时获取当前背景噪音,并以当前噪音为基准线
fill(0);
for(int posx =0;posx<=width;posx++)
{
float posy =offset+(sin(angle-dx)*scaleVal); //从左往右,每次加一个单位直到画面的右边
rect(posx,posy,1,1); //画出该点
angle+=angleInc; //角度增加
}
dx+=0.05; //改变曲线的相位,值越小曲线运动越慢
angle =0; //角度重置
}
void serialEvent(Serial myPort)
{
String message =myPort.readStringUntil(LF); //返回一个字符串缓冲区,并包括一个特殊字符
if(message!=null) //当读取到的信息不为空时
{
String [] data =message.split(","); //将字符串信息以逗号(“,”)分隔
if(data[0].charAt(0)==HEADER) //当data中第一个字符为h时
{
if(data.length>1) //当data长度大于1的时候
{
vol =Integer.parseInt(data[1]); //获取音量数据大于当前设定的最大值时
if(high<vol) //当最大值设置为读取到的音量的值
{
vol = high;
}
if(under>vol) //当音量数据大于当前设定的最小值时
{
vol=under; //将最小值设置为读取到的音量的值
}
}
}
}
}
void mouseClicked()
{
if(mouseX<40&&mouseX>20)
{
if(mouseY<40&&mouseY>20)
{
under =vol;
}
}
}
arduino代码
int sensorPin =A5;
int sensorValue =0;
void setup()
{
pinMode(sensorPin,INPUT);
Serial.begin(9600);
}
void loop()
{
sensorValue =analogRead(sensorPin);
Serial.println(sensorValue,DEC);
}
旋转编码器控制播放音乐
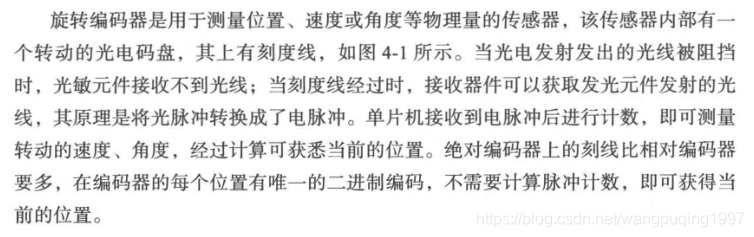
Arduino读取编码器值
const int interruptA =0; //中断InterruptA在0引脚上
int CLK =2; //连接D2的脉冲信号
int DT=3; //连接D3的脉冲信号,用于判断
int SW =4; //正转(前进)或者反转(后退)
int COUNT =0; //连接D4的开关信号
void setup()
{
attachInterrupt(interruptA,RoteStateChanged,FALLING);//外部中断,高电平变为低电平触发,调用中断处理字函数RotestateChanged()
pinMode(CLK,INPUT);
digitalWrite(2,HIGH);
pinMode(DT,INPUT);
digitalWrite(3,HIGH);
pinMode(SW,INPUT);
digitalWrite(4,HIGH);
Serial.begin(9600);
}
void loop()
{
if(!(digitalRead(SW))) //按下按钮
{
COUNT =0; //计数清零
Serial.println("STOP COUNT =0");//串口输出清零
delay(2000); //延迟2秒
}
Serial.println(COUNT); //如果没有按钮,输出计数值
}
void RoteStateChanged() //当CLK下降沿触发的时候,进入中断
{
if(digitalRead(DT)) //当DT为高电平时,前进方向
{
COUNT++; //计数器累加
delay(20);
}
else
{
COUNT--;
delay(20);
}
}
Processing读取音乐文件用arduino调节音量大小
processing代码
import processing.serial.*; //导入Serial和minim函数库
import ddf.minim.*;
Minim minim; //实例化一个Minim对象
AudioPlayer song; //实例化一个音乐播放器对象
Serial port =new Serial(this,"COM3",9600);
float volume =-40; //初始音量大小
void setup()
{
size(300,300);
minim =new Minim(this); //初始化minim
song =minim.loadFile("Michal.mp3"); //初始化song对象,读取音乐文件
song.play(); //播放音乐
song.loop(); //循环播放
}
void draw()
{
background(125);
if(port.read()=='a') //如果Processing从串口读到字符a,增大音量
{
volume++;
}
if(port.read()=='b') //如果Processing从串口读到字符b,减小音量
{
volume--;
}
song.setGain(volume);
}
void stop() //停止播放音乐
{
song.close(); //关闭音乐
minim.stop();
super.stop();
}
arduino代码
const int interruptA =0; //中断InterruptA在0引脚上
int CLK =2; //连接D2的脉冲信号
int DT=3; //连接D3的脉冲信号,用于判断
int SW =4; //正转(前进)或者反转(后退)
int COUNT =0; //连接D4的开关信号
void setup()
{
attachInterrupt(interruptA,RoteStateChanged,FALLING);//外部中断,高电平变为低电平触发,调用中断处理字函数RotestateChanged()
pinMode(CLK,INPUT);
digitalWrite(2,HIGH);
pinMode(DT,INPUT);
digitalWrite(3,HIGH);
pinMode(SW,INPUT);
digitalWrite(4,HIGH);
Serial.begin(9600);
}
void loop()
{
if(!(digitalRead(SW))) //按下按钮
{
COUNT =0; //计数清零
}
}
void RoteStateChanged() //当CLK下降沿触发的时候,进入中断
{
if(digitalRead(DT)) //当DT为高电平时,前进方向
{
COUNT++; //计数器累加
Serial.println('a');
delay(50);
}
else
{
COUNT--;
delay(50);
Serial.println('b');
}
}
运行程序后 转传感器的旋钮改变音量大小。
跟随环境光变化的太阳
processing代码
PImage img;
import processing.serial.*;
Serial myPort;
void setup()
{
myPort =new Serial(this,"COM3",9600);
size(500,500);
img =loadImage("sun.jpg");
background(255);
myPort.clear();
}
int data;
void draw()
{
if(myPort.available()>0)
{
data=myPort.read();
if(data>255)
{
data =255;
}
data =255-data;
println(data);
}
sun(data);
// println("");
}
void sun(int light)
{
tint(light);
image(img,0,0);
}
arduino代码
const int photocellPin = A0; //photoresistor module attach to A0
const int ledPin = 13; //pin 13 built-in led
const int relayPin=8; //relay module attach to digital 8
int outputValue = 0;
void setup()
{
pinMode(relayPin,OUTPUT);
pinMode(ledPin,OUTPUT);
Serial.begin(9600);
}
void loop()
{
outputValue = analogRead(photocellPin);
Serial.write(outputValue); //print it in serial monitor
if(outputValue <= 200) //if the value of photoreisitor is greater than 400
{
digitalWrite(ledPin,HIGH); //turn on the led
digitalWrite(relayPin,LOW); //relay connected
}
else //else
{
digitalWrite(ledPin,LOW);
digitalWrite(relayPin,HIGH);
}
delay(20); //delay 1s
}

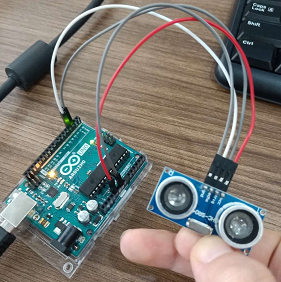
超声波测距传感器的读取与显示
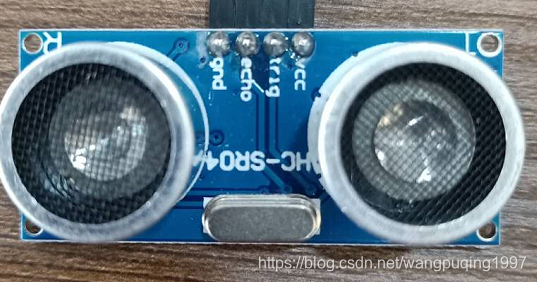

Arduino读取超声波传感器
int outputPin =2; //接超声波Trig到数字D2脚
int inputPin =3; //接超声波Echo到数字D3脚
void setup()
{
Serial.begin(9600);
pinMode(inputPin,INPUT);
pinMode(outputPin,OUTPUT);
}
void loop()
{
digitalWrite(outputPin,LOW);
delayMicroseconds(2);
digitalWrite(outputPin,HIGH);//发出持续时间为10微秒到Trig脚驱动超声波检测
delayMicroseconds(10);
digitalWrite(outputPin,LOW);
int distance =pulseIn(inputPin,HIGH); //接收脉冲的时间
distance =distance/58; //将脉冲时间转换为距离值
Serial.print("The distance is :");
Serial.println(distance);
delay(50);
}
串口监测

Processing绘制距离与提示
读取一张电动车的图片,在右边画上一堵墙,墙上的读数是电动车与墙的距离。用键盘“左”和“右”键控制电动车原理或靠近墙。与墙的距离会实时显示在屏幕右上角。最远为450cm,最近为0cm。
PImage electrocar;
int x =0,y =220;
int distance =0;
void setup()
{
size(640,480);
electrocar =loadImage("diandongche.jpg"); //读取图片
background(255);
image(electrocar,x,y);
}
void draw()
{
background(255);
fill(30,40,40);
rect(600,80,30,395);
image(electrocar,x,y);
distance=450-x*450/(600-electrocar.width); //换算与墙之间的距离,设其最大值为450m
text("Distance is "+distance+"CM",250,50);
}
void keyPressed() //特殊键的key值为CODED,此时需要keyCode再次判断
{
if(key==CODED)
{
switch(keyCode)
{
case LEFT: //按下“左”键
if(x>0)
{
x=x-1;
}
else
{
x=0;
}
break;
case RIGHT: //按下“右”键
if(x<(600-electrocar.width))
{
x=x+1;
}
else
{
x= 600-electrocar.width;
}
break;
default:
break;
}
}
}
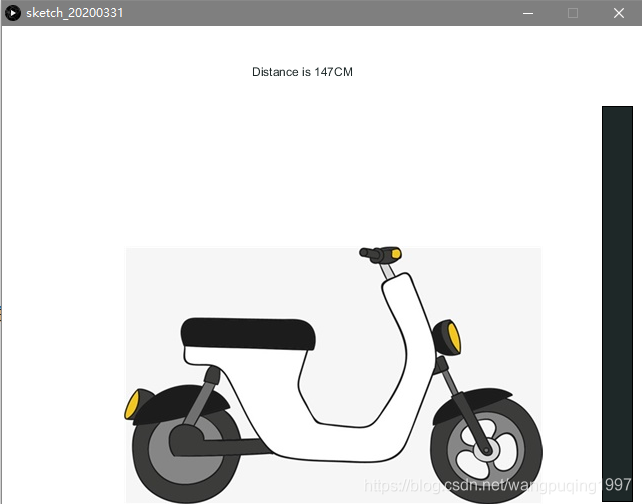
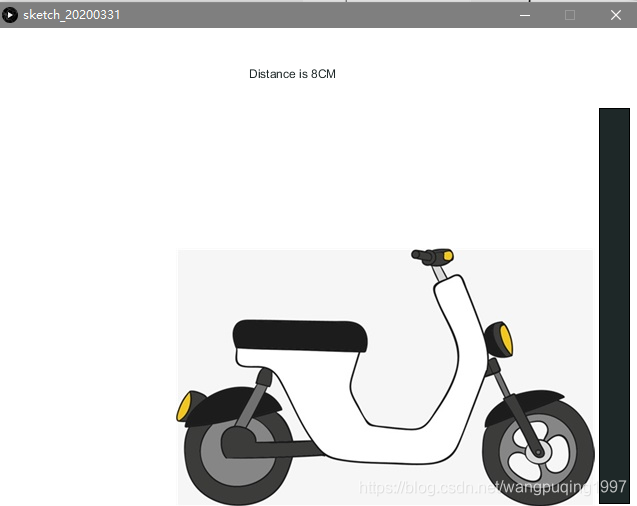
根据该距离值与墙的距离绘制电动车。超声波测距传感器读取的数值大,则电动车离墙的距离远,读取的数值小,则电动车离墙的距离近。
processing代码:
import processing.serial.*;
Serial myPort;
PImage electrocar;
int x =0,y =220;
int distance =0;
void setup()
{
size(640,480);
electrocar =loadImage("diandongche.jpg");
myPort =new Serial(this,"COM3",9600);
}
void draw()
{
if(myPort.available()>0)
{
distance =myPort.read();
println(distance);
}
background(255);
fill(30,40,40);
rect(600,80,30,395);
x =(450-distance)*(600-electrocar.width)/450; //将读取的距离值换算成实际的坐标
image(electrocar,x,y);
text("Distance is "+distance+"CM",250,50);
}
Arduino代码
int outputPin =2; //接超声波Trig到数字D2脚
int inputPin =3; //接超声波Echo到数字D3脚
void setup()
{
Serial.begin(9600);
pinMode(inputPin,INPUT);
pinMode(outputPin,OUTPUT);
}
void loop()
{
digitalWrite(outputPin,LOW);
delayMicroseconds(2);
digitalWrite(outputPin,HIGH);//发出持续时间为10微秒到Trig脚驱动超声波检测
delayMicroseconds(10);
digitalWrite(outputPin,LOW);
int distance =pulseIn(inputPin,HIGH); //接收脉冲的时间
distance =distance/58; //将脉冲时间转换为距离值
Serial.write(distance);
delay(50);
}
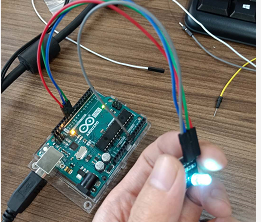
控制彩色LED灯
int Red =3;
int Green =5;
int Blue =6;
void setup()
{
pinMode(Red,OUTPUT);
pinMode(Green,OUTPUT);
pinMode(Blue,OUTPUT);
}
void loop()
{
analogWrite(Red,random(0,255));
analogWrite(Green,random(0,255));
analogWrite(Blue,random(0,255));
delay(200);
}
Processing进度条控制
int redDisplay,greenDisplay,blueDisplay; //定义R,G,B 3个颜色分量显示的长度变量
int red,green,blue; //定义R,G,B三种颜色分量的值的变量
void setup()
{
size(700,500);
}
void draw()
{
background(204);
rectMode(CORNER);
noFill(); //不填充颜色
strokeWeight(2); //三个进度条的边框厚度为2个像素
stroke(255,0,0); //描边颜色为红色
rect(50,100,500,50); //绘制红色分量进度条的边框
stroke(0,255,0); //描边颜色为绿色
rect(50,200,500,50); //绘制绿色分量进度条的边框
stroke(0,0,255); //描边颜色为蓝色
rect(50,300,500,50); //绘制蓝色分量进度条的边框
fill(red,0,0); //填充颜色为当前红色分量的值
rect(50,100,redDisplay,50); //以当前红色分量的长度画出进度条
fill(0,green,0); //填充颜色为当前绿色分量的值
rect(50,200,greenDisplay,50); //以当前绿色分量的长度画出进度条
fill(0,0,blue); //填充颜色为当前蓝色分量的值
rect(50,300,blueDisplay,50); //以当前蓝色分量的长度画出进度条
fill(red,green,blue); //以当前R,G,B分量合成的颜色值为填充,画出一个矩形
rect(300,400,50,50);
}
void mouseClicked() //定义一个鼠标事件
{
if(mouseX<=550&&mouseX>=50)
{
if(mouseY<=150&&mouseY>=100) //当鼠标指针在该范围时,读取mouseX的值,映射到0~255,为红色颜色分量的值
{
red =(int)map(mouseX,50,550,0,255);
redDisplay =mouseX-50;
}
else if(mouseY<=250&&mouseY>=200)
{
green =(int)map(mouseX,50,550,0,255);
greenDisplay =mouseX-50;
}
else if(mouseY<=350&&mouseY>=300)
{
blue=(int)map(mouseX,50,550,0,255);
blueDisplay =mouseX-50;
}
}
}
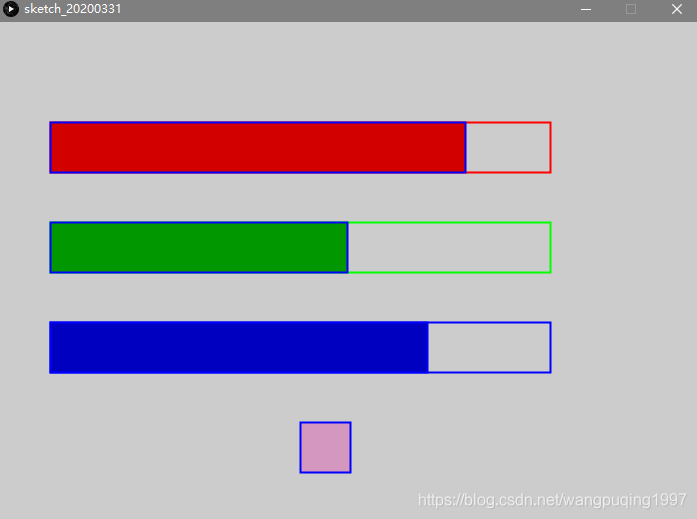
Processing调节彩色LED灯
processing通过R,G,B分量经串口发送到Arduino上面。Arduino经过处理数据,将R,G,B各分量传送到RGB彩色LED模块,就能实现颜色的改变。
processing代码
import processing.serial.*;
Serial port =new Serial(this,"COM3",9600);
int redDisplay,greenDisplay,blueDisplay;
int red,green,blue;
String strRed,strGreen,strBlue;
String message;
void setup()
{
size(700,500);
}
void draw()
{
background(204);
frame(); //绘制进度条边框
RGBDisplay(); //绘制进度条
sendMessage(); //发送数据
}
void frame() //绘制进度条边框函数
{
rectMode(CORNER);
noFill();
stroke(255,0,0);
strokeWeight(2);
rect(50,100,500,50);
stroke(0,255,0);
rect(50,200,500,50);
stroke(0,0,255);
rect(50,300,500,50);
}
void RGBDisplay() //绘制进度条函数
{
rectMode(CORNER);
noStroke();
fill(red,0,0);
rect(50,100,redDisplay,50);
fill(0,green,0);
rect(50,200,greenDisplay,50);
fill(0,0,blue);
rect(50,300,blueDisplay,50);
fill(red,green,blue);
rect(300,400,50,50);
fill(0);
rect(400,400,50,50);
}
void mouseClicked() //单击鼠标事件,改变现实的进度条,同时更新R,G,B各分量的值
{
if(mouseX<=550&&mouseX>=50)
{
if(mouseY<=150&&mouseY>=100)
{
red =(int)map(mouseX,50,550,0,255);
redDisplay =mouseX-50;
}
if(mouseY<=250&&mouseY>=200)
{
green =(int)map(mouseX,50,550,0,255);
greenDisplay =mouseX-50;
}
if(mouseY<=350&&mouseY>=300)
{
blue =(int)map(mouseX,50,550,0,255);
blueDisplay =mouseX-50;
}
if(mouseX<=450&&mouseX>=400)
if(mouseY>=400&&mouseY<=450)
{
shut(); //当鼠标在该区域单击时,关闭LED灯
}
}
}
void sendMessage() //定义发送数据函数
{
strRed =red+""; //将red分量转换为字符串类型
if(red<100) //当red分量小于100时,将red转换为字符串,并且在前面加上字符0
strRed ="0"+red;
if(red<10) //当red分量小于10时,将red转换为字符串,并且在前面加上字符00
strRed="00"+red;
strGreen =green+"";
if(green<100)
strGreen="0"+green;
if(green<10)
strGreen="00"+green;
strBlue =blue+"";
if(blue<100)
strBlue ="0"+blue;
if(blue<10)
strBlue="00"+blue;
message ="a"+strRed+strGreen+strBlue+"s"; //将R,G,B各分量连接为字符串,通过串口发送到Arduino
port.write(message);
}
void shut() //定义关闭LED灯函数
{
redDisplay =0;
greenDisplay =0;
blueDisplay =0;
red =0;
green =0;
blue =0;
}

遥感控制坦克
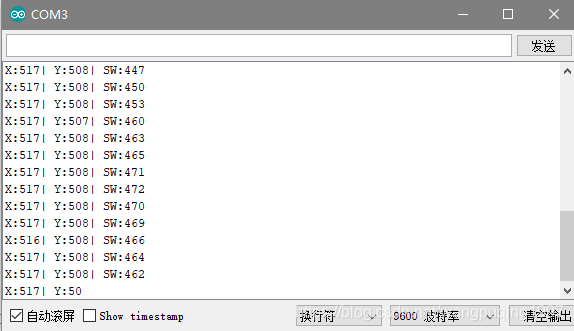
Arduino读取摇杆数值
int Xaxis =A0;
int Yaxis =A1;
int SW =A2;
int value =0; //该变量读取模拟口的值
void setup()
{
Serial.begin(9600);
}
void loop()
{
value =analogRead(Xaxis); //读取X轴模拟端口0
Serial.print("X:");
Serial.print(value,DEC);
value =analogRead(Yaxis); //读取Y轴模拟端口1
Serial.print("| Y:");
Serial.print(value,DEC); //读取SW按钮模拟端口2
value =analogRead(SW);
Serial.print("| SW:");
Serial.println(value,DEC); //该值设置需大小适中,太大了延时较长
delay(40);
}
Processing绘制坦克和键盘控制移动
int x=300,y=200; //坦克的起始坐标
int speed =3; //坦克的移动速度
class Tank
{
Tank()
{
}
void DisplayTank(int px,int py,char direction) //显示坦克的函数
{
background(204);
switch(direction) //判断坦克的方向
{
case 'F': //前进
fill(255,255,0);
rect(px-10,py,20,40);
rect(px+30,py,20,40);
ellipse(px+20,py+20,20,25);
rect(px+17,py-10,6,19);
break;
case 'B': //后退
fill(255,255,0);
rect(px-10,py,20,40);
rect(px+30,py,20,40);
ellipse(px+20,py+20,20,25);
rect(px+17,py+30,6,19);
break;
case 'L': //左行
fill(255,255,0);
rect(px,py-10,40,20);
rect(px,py+30,40,20);
ellipse(px+20,py+20,25,20);
rect(px-10,py+17,19,6);
break;
case 'R': //右行
fill(255,255,0);
rect(px,py-10,40,20);
rect(px,py+30,40,20);
ellipse(px+20,py+20,25,20);
rect(px+30,py+17,19,6);
break;
default:
break;
}
}
void boundary(int px,int py) //坦克超出边界判断
{
if(px<10) x=10;
if(py<10) y =10;
if(px>(width-50)) x=width-50;
if(py>(height-50)) y =height-50;
}
}
Tank tank;
void setup()
{
size(640,480);
tank =new Tank();
tank.DisplayTank(x,y,'F'); //出现在初始位置
}
void draw()
{
}
void keyPressed()
{
if(key==CODED) //特殊键的key值为CODED,此时需要keyCode再次判断
{
switch(keyCode)
{
case UP:
y=y-speed;
tank.boundary(x,y);
tank.DisplayTank(x,y,'F');
break;
case DOWN:
y=y+speed;
tank.boundary(x,y);
tank.DisplayTank(x,y,'B');
break;
case LEFT:
x=x-speed;
tank.boundary(x,y);
tank.DisplayTank(x,y,'L');
break;
case RIGHT:
x=x+speed;
tank.boundary(x,y);
tank.DisplayTank(x,y,'R');
break;
default:
break;
}
}
}
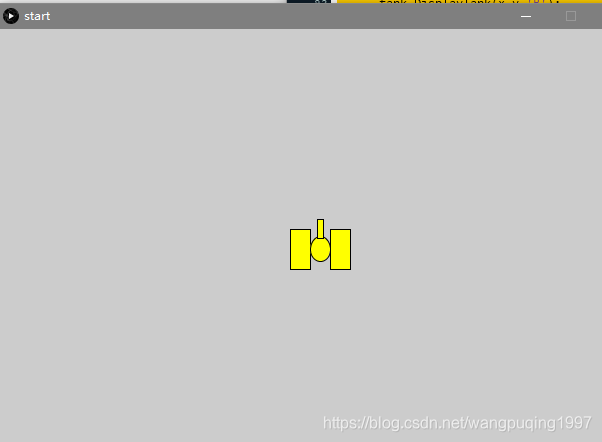
摇杆控制坦克移动
processing代码
import processing.serial.*;
Serial myPort;
public static final char HEADER ='M';
public static final short LF =10;
public static final short portIndex =2;
public static final short centerX=515;
public static final short centerY=517;
int x=300,y=200;
int speed =3;
char Direction;
class Tank
{
Tank()
{
}
void DisplayTank(int px,int py,char direction)
{
background(204);
switch(direction)
{
case 'F':
fill(255,255,0);
rect(px-10,py,20,40);
rect(px+30,py,20,40);
ellipse(px+20,py+20,20,25);
rect(px+17,py-10,6,19);
break;
case 'B':
fill(255,255,0);
rect(px-10,py,20,40);
rect(px+30,py,20,40);
ellipse(px+20,py+20,20,25);
rect(px+17,py+30,6,19);
break;
case 'L':
fill(255,255,0);
rect(px,py-10,40,20);
rect(px,py+30,40,20);
ellipse(px+20,py+20,25,20);
rect(px-10,py+17,19,6);
break;
case 'R':
fill(255,255,0);
rect(px,py-10,40,20);
rect(px,py+30,40,20);
ellipse(px+20,py+20,25,20);
rect(px+30,py+17,19,6);
break;
default:
break;
}
}
void boundary(int px,int py)
{
if(px<10) x=10;
if(py<10) y=10;
if(px>(width-50)) x=width-50;
if(py>(height-50)) y=height-50;
}
char tankDirection(int px,int py)
{
if((px<(centerX-30))&&(abs(px-centerX)>abs(py-centerY)))
Direction ='L';
if((px>(centerX+30))&&(abs(px-centerX)>abs(py-centerY)))
Direction ='R';
if((py<(centerY-30))&&(abs(px-centerX)<abs(py-centerY)))
Direction ='F';
if((py>(centerY+30))&&(abs(px-centerX)<abs(py-centerY)))
Direction ='B';
if((px>=(centerX-30))&&(px<=(centerX+30))&&(py>=(centerY-30))&&(py<=(centerY+30)))
Direction='S';
return Direction;
}
}
Tank tank;
void setup()
{
size(640,480);
tank =new Tank();
tank.DisplayTank(x,y,'F');
myPort =new Serial(this,"COM3",9600);
myPort.clear();
}
void draw()
{
}
void serialEvent(Serial myPort)
{
String message =myPort.readStringUntil(LF);
char direction;
if(message!=null)
{
print(message);
String [] data =message.split(",");
println(data[1]);
println(data[2]);
if(data[0].charAt(0)==HEADER)
{
if(data.length>2)
{
int tempX =Integer.parseInt(data[1]);
int tempY =Integer.parseInt(data[2]);
print("x="+tempX);
print(",y="+tempY);
direction =tank.tankDirection(tempX,tempY);
switch(direction)
{
case 'F':
y =y-speed;
tank.boundary(x,y);
tank.DisplayTank(x,y,'F');
break;
case 'B':
y =y+speed;
tank.boundary(x,y);
tank.DisplayTank(x,y,'B');
break;
case 'L':
x =x-speed;
tank.boundary(x,y);
tank.DisplayTank(x,y,'L');
break;
case 'R':
x =x+speed;
tank.boundary(x,y);
tank.DisplayTank(x,y,'R');
break;
case 'S':
break;
default:
break;
}
}
}
}
}
arduino代码
int potXPin =A0;
int potYPin =A1;
char HEADER ='M';
void setup()
{
Serial.begin(9600);
}
void loop()
{
int x =analogRead(potXPin); //读取摇杆X轴数据
int y =analogRead(potYPin); //读取摇杆Y轴数据
Serial.print(HEADER); //输出数据帧头
Serial.print(","); //逗号分隔符
Serial.print(x,DEC); //X轴数据
Serial.print(","); //逗号分隔符
Serial.print(y,DEC); //Y轴数据
Serial.print(","); //逗号分隔符
Serial.println(); //输出换行符作为帧尾
delay(40);
}

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









