







1.carsim运行配置
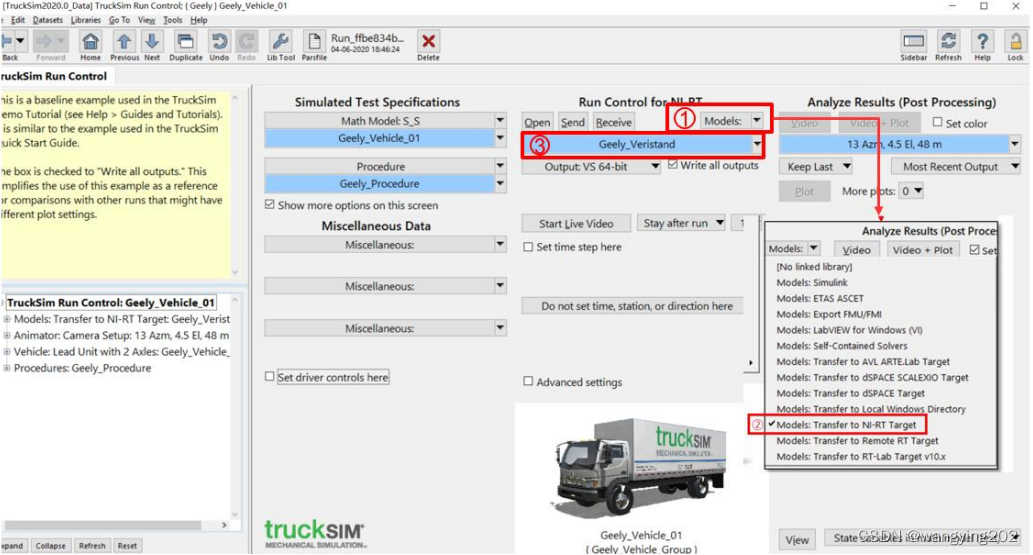
①为选择车辆模型运行的平台;
② NIRT 平台(transfer to NI-RT target);
③是选择车辆模型的配置文件(包含NI 实时机连接配置及车辆输入输出接口配置)
2.配置文件设置
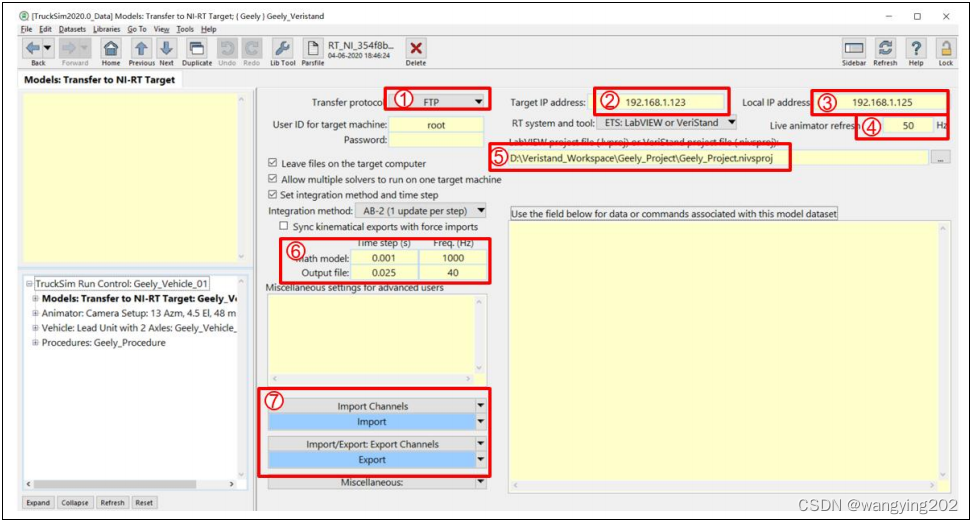
- 选择模型传输方式“FTP”;
- 设置 NI 实时系统 IP 地址,你可以通过以下方式查看 NI 实时系统 IP 地址:
打开 NI Max;
点击远程系统;
选择当前 NI 实时系统并查看 IP - 设置上位机 IP 地址;
- 设置车辆仿真动画刷新频率;
- 设置 Veristand 工程文件地址;
- 设置车辆模型仿真运行步长;
- 设置车辆模型输入输出接口。
车辆模型输入接口配置界面如图所示。
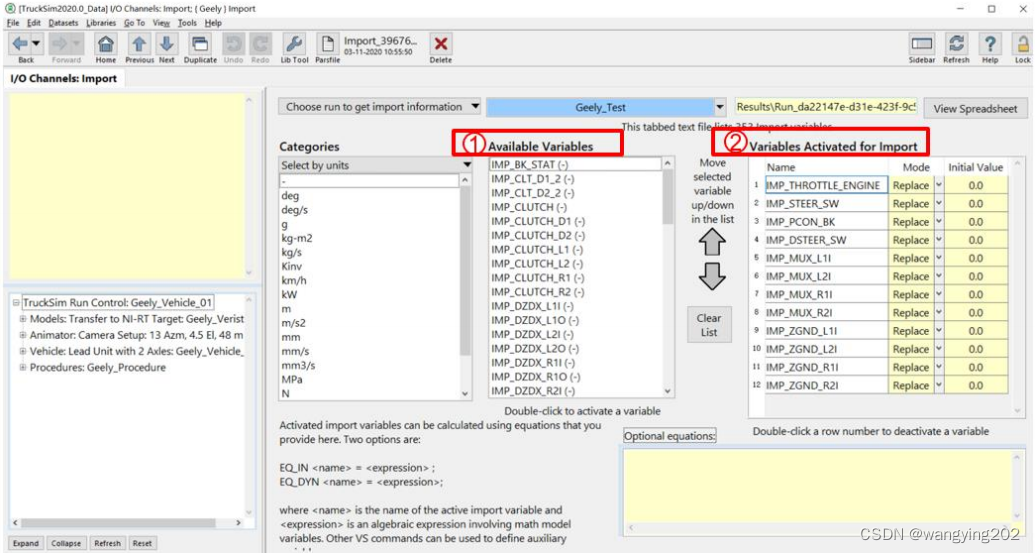
注:图中①为可用变量,②为当前选择变量。
3.车辆输入输出接口配置:
输入变量:
Import channel:
IMP_MODE_TRANS: 动力传动系统,变速器控制器模式
IMP_RESETX:
IMP_RESETY:
IMP_RESETZ:
IMP_RESETYAW:
IMP_RESETPOS:
IMP_PCON_BK: 制动总泵压力
IMP_STEER_SW: 方向盘角度
IMP_THROTTLE_ENGINE: 开环节气门控制
IMP_MUX_L1: 左1轮胎CTC处的地面纵向摩擦
IMP_MUX_L2: 左2轮胎CTC处的地面纵向摩擦
IMP_MUX_R1: 右1轮胎CTC处的地面纵向摩擦
IMP_MUX_R1: 右2轮胎CTC处的地面纵向摩擦
IMP_MUY_L1: 左1轮胎CTC处的地面横向摩擦
IMP_MUY_L2: 左2轮胎CTC处的地面横向摩擦
IMP_MUY_R1: 右1轮胎CTC处的地面横向摩擦
IMP_MUY_R1: 右2轮胎CTC处的地面横向摩擦
IMP_ZGND_L1: 左1轮胎CTC处在地面的Z坐标
IMP_ZGND_L2: 左2轮胎CTC处在地面的Z坐标
IMP_ZGND_R1: 右1轮胎CTC处在地面的Z坐标
IMP_ZGND_R2: 右2轮胎CTC处在地面的Z坐标
输出变量:
Export chennel:
VxNf_SM: X轴速度矢量,km/h
VyNf_SM: Y轴速度矢量,km/h
Roll: 侧倾角,deg
Pitch: 俯仰角度,deg
Vz: 垂直速度,km/h
Xo: 全局X坐标,m
Yo: 全局Y坐标,m
Zo: 全局Z坐标,m
Yaw: 偏航角,deg
4.初始配置

1 设置运行时间;
2 设置模型初始化类型;
3 设置车辆初始位置。















 5095
5095











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









