







 本文介绍了仿生机器人领域的中枢模式发生器(CPG)控制方法,探讨了其在行走控制网络中的作用,包括高层中枢系统、低级中枢系统和信息反馈模块。CPG在各种类型的机器人如腿式、爬行、游泳和飞行机器人中的成功应用也被提及。
本文介绍了仿生机器人领域的中枢模式发生器(CPG)控制方法,探讨了其在行走控制网络中的作用,包括高层中枢系统、低级中枢系统和信息反馈模块。CPG在各种类型的机器人如腿式、爬行、游泳和飞行机器人中的成功应用也被提及。
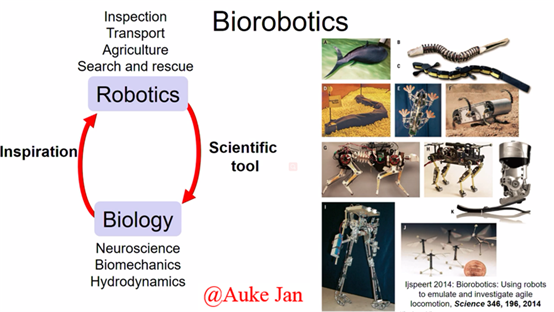
仿生机器人研究是非常有意思的领域,它不仅从自然界中获取灵感,它也为一些生物的研究提供一个手段和基础,正如下图中所展示的。不论人工智能发展的如何迅速,机械结构始终做为着一个承载的平台,其重要性不可忽略。
(Auke Jan Ijspeert gives a talk on Animal Locomotion - Learning from Robots at WORLDS.MINDS MOBILITY)
仿生机器人有结构仿生,上图不难看出,但也有着仿生控制方法,相比于广泛存在基于模型,和基于行为的控制方法,它不需要进行复杂的数学计算和分析,方法相对简单,但是要想用于实际的工程中,需要结合生物运动资料或者优化算法来确定控制的参数。在这里主要介绍下生物控制方法(此处指中枢模式发生器,CPG)在机器人中的运用。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









