







欢迎关注微信公众号 “四足机器人研习社”,本公众号的文章和资料和四足机器人相关,包括行业的经典教材、行业资料手册,同时会涉及到职业知识学习及思考、行业发展、学习方法等一些方面的文章。
最近看到一篇不错的四足英文综述,截取部分翻译后给大家分享,原文和链接见文末!!!
前情提要:机械结构篇之四足机器人结构
3 四足机器人的控制
3.1 运动规划
四足机器人的运动规划包括选择合适的地面接触点和规划腿部轨迹,以防止机器人翻倒。通过生成合适的腿部轨迹,可以将机器人与地面之间的冲击降至最低。
3.1.1 步态生成方法
四足机器人的运动规划包括步态生成方法和步态执行。常用的步态生成方法包括中央模式发生器(CPG)、弹簧加载倒摆(SLIP)、零力矩点(ZMP)和贝塞尔曲线。
CPG通过模拟生物体的低级神经元来产生稳定的周期性振荡信号,从而允许机器人进行步态规划。该方法利用数学技术生成振荡曲线,作为确定腿关节位置和速度的输入。凭借特定的自稳定能力,可以使用这些振荡曲线轻松调整四足机器人腿之间的相位关系。CPG 结构相对简单,计算负载低。由于它依赖于已知的振荡器,尽管这种方法具有一定的自稳定能力,但由于机器人受到巨大的环境干扰,在面对复杂地形时不再适用。[54]福冈等[55]利用神经振荡器在关节空间产生转矩控制或相位调制信号,实现四足机器人在不平坦地形上的运动稳定性控制。为了保证四足机器人的稳定性,有必要调整CPG的参数,为关节产生适当的控制信号。对于具有多个自由度的机器人,需要多个CPG单元来满足控制要求,从而增加了参数调整的复杂性。Liu等人。[56]研究了工作空间中四足机器人的轨迹生成方法。他们开发了一种方法,将CPG网络的输出信号映射到3D工作空间中四足机器人的轨迹。这种方法使人工智能机器人 (AIBO) 机器人能够在斜坡和楼梯等不规则表面上自适应移动。它可以通过修改一些CPG网络参数来实现步态转换和改变行走模式。近年来,强化学习(RL)在机器人领域得到了广泛而成功的应用。Wang et al.[57]将DRL与CPG方法相结合,在机器人中产生有节奏的运动。这种方法使机器人能够盲目行走并抵抗外界干扰。
SLIP模型将腿简化为带负载的无质量弹簧,通过三组分方法实现机器人的跳跃控制。[58]由于其原理简单、实用性好,该技术已被波士顿动力、杭州宇树科技有限公司、山东大学等多家机构和高校广泛采用。龚等人.[3]规划机器人脚在以零速度和加速度接触地面时的动态步态轨迹。基于3D-SLIP模型,他们通过对具有20自由度的复杂机器人系统的仿真验证了动态步态的有效性。SLIP模型可以解释各种步态期间腿部运动的动力学。基于此,Hayati等人。[59]使用SLIP模型研究了顺应地形对快速腿部运动的影响。然而,SLIP模型无法直接调整步频、周期等与时间相关的参数,这限制了其实现奔腾、步态转换等不对称步态的能力。
ZMP控制假设机器人的支撑多边形内有一个点,其中作用在机器人上的地面反作用力与重力和惯性力相平衡。基于这一稳定性准则,对机器人的轨迹进行了规划,在控制低速运动方面表现出优异的性能。[60]Vukobratovi 等人。[61]应用ZMP方法生成机器人运动。此方法依赖于预定义的立足点。虽然将立足点和身体运动轨迹的规划分离可以降低复杂性,但立足点的设计旨在帮助身体实现所需的运动,这可能会导致不自然的运动。Winkler等人。[62]引入了基于顶点的 ZMP 约束,它可以处理任何方向的点接触、线接触和曲面接触。这种步态生成方法使四足机器人能够行走、小跑、跳跃等。然而,ZMP方法需要精确的动态和环境模型,并且可能无法对干扰做出快速响应。轨迹规划的过程非常耗时。此外,此方法可能不适用于具有需要精确控制的灵活链接的对象。
在四足机器人领域,贝塞尔曲线被广泛用于生成脚轨迹。这些曲线在所有点上都表现出连续性和可微性,使其适用于模拟动物的足部轨迹。猎豹幼崽四足机器人的足部轨迹由四条二次贝塞尔曲线产生,通过调整起飞和着陆时的腿角来提高机器人的稳定性。[63]Manoonpong 等人。[64]通过重放从拟合到狗脚轨迹数据的四条立方贝塞尔曲线得出的参数化脚轨迹,实现了各种运动模式。麻省理工学院猎豹 2 机器人在摆动阶段的脚轨迹基于三条五阶贝塞尔曲线。[65]Zhu et al.[66]应用高阶贝塞尔曲线来设计四足机器人在摆动阶段的脚部轨迹,确保在不熟悉的斜坡上稳定运动。目前,贝塞尔曲线被广泛用于足部轨迹规划。与以前的椭圆曲线相比[67]和摆线轨迹,[68]贝塞尔曲线的导数也是贝塞尔曲线。此属性简化了起始和起终点位速度的确定。此外,曲线在每个点都是平滑且可微分的,从而实现平滑运动。
3.1.2 步态
四足哺乳动物四肢的抬起和着陆顺序遵循一种称为步态的特定模式。四足动物通过协调四肢的运动来展示采用不同步态的能力,从而在复杂地形中具有卓越的运动效率和适应性。通过仿生实验和步态分析,研究人员已经确定了四足机器人的各种步态。通常,步态可以分为对称步态,如走路(walk)、小跑(tort)和踱步(pace),[69]和不对称步态,如飞小跑(flying tort)、跳跃(bound)和疾驰(gallop)。[70]不同步态的相位关系图如图11所示。
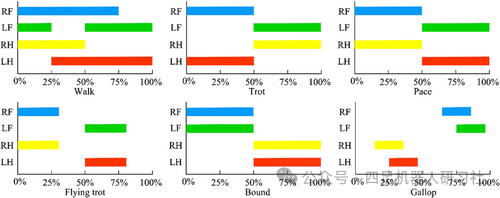
图11. 四足机器人的步态。
在这些步态中,四足机器人经历了不同的速度和强度,导致配置发生了显著变化。在行走步态中,三条腿随时在地面上,形成稳定的三角形支撑结构。因此,它也表示为静态步态。[71]小跑是一种中低速步态,通常用于从步行到跑步的过渡,以达到更高的速度。它的特点是四条腿在矢状面内以对角线模式交替运动。随着速度的增加,四条腿也可能在空中。[72]
四足动物表现出多种多样的跑步步态。迄今为止,大量研究表明,小跑和配速步态因其速度、稳定性、效率和适应性而受到四足机器人的青睐。[73]配速步态广泛应用于机器人运动控制。在这种步态中,左前腿和左后腿具有相同的运动,而右前腿和右后腿表现出相同的运动。
跳跃小跑是一种独特的小跑类型,其特征是躯干的弹道运动。在这种步态中,一对对角线腿同时移动并与另一对交替移动,导致一条腿都没有与地面接触。然而,四足机器人很少能实现这种动态步态。[17]HyQ机器人基于主动柔顺控制方法,在其机械结构中首次实现了不使用弹簧的小跑运动。[74]由苏黎世联邦理工学院开发的 ANYmal 机器人可以执行动态步态,包括飞行小跑、跳跃和俯卧。[75]麻省理工学院猎豹 3 和迷你猎豹[76]通过将运动控制问题转换为基于地面反作用力模型预测控制 (MPC) 的凸优化问题,简化了运动控制问题。可以实现站立、小跑、疾驰、跳跃和行走等各种步态运动。这些实现方法对机器人的结构设计和动态建模提出了很高的要求,特别是考虑到机器人的尺寸和重量轻(重量小于100 kg)。关于大型和重型四足机器人的飞行小跑的研究很少。[77]跳跃步态包括四个阶段:飞行、前腿站立、后腿站立和四腿站立。[78]作为一种高速步态,跳跃不仅可以提高机器人的速度,还有助于克服障碍物和沟壑,从而增强环境适应性。疾驰步态是一种快速跑步的形式,其中四条腿循环移动,从而实现最大运动速度。[79]四足动物表现出多种步态,运动步态的选择取决于机器人所需的移动速度,同时最大限度地降低能耗。
3.2 运动控制
运动控制是指在动态运动过程中,通过复杂的算法来调节机器人的位置和关节扭矩,旨在实现动态稳定性并增强整体鲁棒性。与传统的固定底座机器人不同,四足机器人严重依赖脚与地面之间的相互作用来控制运动速度和姿势稳定性。因此,除了机器人本身的动力学之外,四足机器人的控制还需要考虑机器人脚与地面的接触,包括接触反作用力和摩擦力。四足机器人的运动控制策略大致可分为两类:基于模型的控制方法和与模型无关的控制方法。常用方法如图 12 所示。
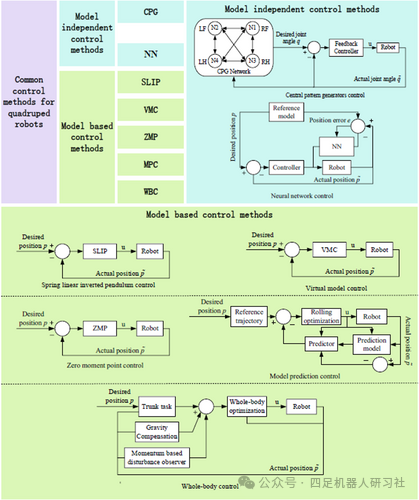
图12.常用控制方法和流程图。
3.2.1 与模型无关的控制方法
四足机器人是一个相对复杂的驱动不足系统。一般来说,四足机器人要实现全向运动,每条腿需要一个用于滚动的自由度和两个用于俯仰的自由度。这意味着四条腿有 12 个主动自由度,躯干有 6 个被动自由度,总共有 18 个自由度。无模型的控制方法不需要精确的动力学模型。这使得机器人能够适应复杂和不确定的环境,增强其运动自主性。
CPG 的概念涉及创建多个周期性振荡器,这些振荡器模拟简单生物体中枢神经系统的结构。这些振荡器相互连接,为机器人的关节生成有节奏的运动轨迹。[80、81]所提出的CPG模型具有参数化程度高、反馈影响小、自修正、自稳定性等优异特性。[82]CPG模型通常分为两类,非线性振荡器模型和神经振荡器模型。Wasista 等人。[83]提出了一种基于CPG神经原理的CPG控制器架构。通过使用神经状态输出模型配置CPG控制器的参数,可以获得有效的四足机器人步态控制信号。Xie等人.[84]利用 Hopf 非线性振荡器模型,使四足机器人能够适应斜坡,执行平滑过渡,并无缝地从平坦的地面穿越到斜坡。由于神经振荡器方程通常是线性的、多参数的和多维的,因此调谐参数和动态分析可能很复杂。[85]由于非线性振荡器的非线性和混沌特性,分析起来通常具有挑战性。[86]
由于神经网络在解决非线性问题方面的卓越能力,是解决机器人技术中复杂非线性控制问题的理想控制方法。[87]Jin 等人。[88]为基于神经网络的四足机器人实施了一种新的小跑步态。所提出的控制系统对不规则地形引起的内部和外部随机扰动表现出显著的精度和显著的抗干扰性。RL作为一种无监督学习算法,近年来在机器人的运动控制和运动学中得到了广泛的应用。[89、90]Sheng 等人。[91]引入了由RG和PF网络组成的新型RL控制架构,解决了RL对奖励函数的敏感性问题,提高了训练速度。Pei 等人。[92]利用新兴的深度强化学习(DRL)技术,研究了四足机器人在陌生和非结构化地形中面临的运动挑战。DRL 结合了 RL 和深度学习 (DL) 的优势。因此,DRL 能够以最少的先验知识处理高维控制空间中的复杂任务。[93]
3.2.2 基于模型的控制方法
基于模型的控制方法遵循“模型-规划-控制”的概念。在这种方法中,首先对机器人和环境进行建模,然后规划机器人的理想运动轨迹,最后通过反馈控制将机器人的运动近似于理想轨迹。基于模型的控制方法的主流思想包括基于简化模型的方法,如SLIP和虚拟模型控制(VMC),基于完整动力学模型的方法,如ZMP、MPC和WBC,以及基于逆动力学建模的方法,包括比例积分微分(PID)、自适应控制和反步控制。
SLIP模型是腿部机器人运动控制中常用的近似建模方法。单腿支撑配置称为弹簧倒摆模型,其中运动过程相当于倒摆的摆动和伸展过程。[94]用于四足机器人的弹簧倒摆算法通过近似等效方法将基本位置和姿态控制解耦。[3]基于两栖球形四足机器人平台,何等人。[73]使用SLIP模型实现小跑步态和配速步态。Yu 等人。[95]设计了一个具有柔性脊柱的 12 自由度四足机器人,基于任务空间双 SLIP 模型控制。机器人质心的预期轨迹是基于两个非耦合的 SLIP 模型生成的。然后设计一个合适的控制器,使四足机器人能够跟踪所需的轨迹,从而实现稳定的奔腾步态。基于倒摆模型的运动控制方法建模方法简单,对建模精度要求不高,SLIP模型固有的非线性强,对获得精确的解析解提出了挑战。[96]
VMC方法最早由Jerry E. Pratt提出,并应用于双足机器人的运动控制。[97]通过使用VMC,机器人系统的所有空间运动都大致表示为单个刚性浮体的位置和姿态运动。底座与地面的相互作用可以粗略地表示为一个虚拟的弹簧阻尼模型,以在不考虑所有腿的支撑作用时调节底座体的运动。无论底体加速度的影响如何,控制力都作为地面反作用力分布到支撑腿的脚端。每个关节的控制力可以根据每条腿的力雅可比矩阵计算出来。[98]在计算机器人的控制力时,可以通过调整虚拟弹簧刚度和阻尼系数来实现不同的跟踪效果和抗干扰能力。VMC不需要分层控制器,仅使用关节扭矩即可实现四足机器人的速度和高度控制。这种方法考虑了身体和脚的广义坐标,包括它们的配置、位置和速度,不需要繁琐的动态计算。[99]这种控制方法已在具有关节机器人腿的弹性四足动物(StarlETH)机器人上有效实施[100]和 HyQ 机器人。[99]
VMC是一种相对直观的基于模型的控制算法,它通过调整控制参数来解耦机器人的运动变量。该方法在不考虑动力学复杂计算关系的情况下,可以实现良好的力控制特性。该方法具有简单、计算效率高的明显优点。[101]虚拟弹簧的刚度和阻尼系数等同于PID控制中的比例和导数控制参数。因此,当机器人的配置出现明显偏差时,就需要更大的控制扭矩。在脚部摩擦锥的约束下,扭矩迅速达到饱和,影响机器人稳定性的稳定性和持续时间。
VMC 的缺点是虚拟物理组件无法充分描述系统的动态特性,尤其是在快速动态运动能力方面。VMC 有很大的局限性。[102]惯性和传感器噪声会进一步加剧这种限制。此外,与其他预测控制方法相比,VMC 仅考虑系统在当前时刻的控制。因此,它在复杂地形(例如楼梯)上的动态性和鲁棒性将明显变差。[103]
ZMP的理论确保了重力的合力方向和运动过程中作用在身体上的惯性力与脚支撑区域内的地面相交,从而实现稳定的运动。最初,ZMP方法用于分析人形机器人,特别是双足机器人的稳定性。[104]随后,这种方法也被引入,以确保四足机器人的稳定性控制。
这种控制方法依靠脚的稳定性域为机器人提供控制扭矩。因此,脚需要建立一个支撑多边形,这是常用于行走的。[105]基于ZMP的运动被证明对四足机器人的限制性过大,导致机器人运动相对较慢。[106]随着四足机器人的最新发展,人们对实现高动态性能的兴趣越来越大。为了满足四足机器人对高速和灵活性的需求,一种流行的方法是将ZMP方法与其他技术相结合。例如,Bellicoso C 等人。[75]结合顺序二次规划(QP)框架求解非线性ZMP约束。尽管这种方法增加了计算复杂性,但它使四足机器人能够以类似于MPC的方式执行在线运动规划和执行任务。因此,他们可以实现动态步态,例如小跑、踱步和动态横向行走。此外,它还允许他们执行具有完整飞行阶段的步态,例如跳跃、向上俯卧撑和飞行小跑。为了解决四足机器人在面对未感知的干扰时行走步态灵活性的挑战,Xu 等人。[107]提出了合规控制策略。该策略基于ZMP预测控制,旨在建立脚与地面之间的软接触。目的是尽量减少对机器人身体的影响,使其即使在存在干扰的情况下也能稳健灵活地行走。Meng 等人。[108]结合ZMP方法和MPC方法,实现了对小型四足机器人小跑步态的稳定控制。
四足机器人的运动取决于它们的脚与地面之间的接触力。然而,由于脚施加的推力的性质,它们的运动和准确遵循预定轨迹的能力受到限制,尤其是在存在干扰的情况下。[109]在平坦的地面上行走时,机器人运动的稳定性要求压力中心保持在支撑多边形内。[110]MPC的[111]是一类专门设计用于有效处理此类约束并产生稳定运动的控制定律。该控制方案涉及最小化目标函数,[112]在预测范围的末尾约束系统状态,[113]或两者兼而有之。[114]MPC本质上是一种最优控制方法,[112]现代方法通常通过线性来解决它,[113]二次[76]或非线性优化问题。[21]这些问题决定了未来向后预测窗口的控制序列。虽然优化算法的计算能力和效率已经取得了重大进步,但对高动态运动的计算要求仍然是限制MPC广泛应用的重大障碍。
当将四足机器人系统视为浮动基座的多体系统时,研究主要集中在确定底座以及每条腿的位置和姿态上。状态变量包括身体的配置和腿部的关节角度。系统内的控制力包括关节扭矩和地面反作用力。[115、116]身体和每条腿的所需轨迹可以通过预先计划或约束来生成。除了与地面接触和摩擦相关的约束外,[117]任务可以描述为涉及状态变量或关节扭矩的方程或不等式约束方程。为了解决任务约束冲突的问题,在分层控制的设计中必须采用适当的优化方程。这种分层控制器,称为全身控制器 (WBC),[118]集成所有机器人系统的任务。白细胞大致可分为以下几种类型:1)基于QP的二次规划方法[119]不对任务进行优先排序,对每项任务一视同仁;2)基于零空间投影(NSP)的WBC方法[120]将低优先级任务映射到高优先级任务的空空间,以完成具有优先级的多任务运动。然而,这种方法将接触表示为相等约束,这可能不适合快速移动的机器人;3)具有任务优先级权重的QP(分层二次规划[HQP])方法[121]处理低优先级任务,同时确保高优先级任务,同时考虑到各种任务约束,例如平等和不平等约束;该方法可以包含多个约束和任务,但实时应用程序的计算成本很高;4)结合QP和NSP的WBC方法[122]与其他 WBC 方法相比,具有更高的计算效率。
与 VMC 和 MPC 中的简化方法不同,WBC 对机器人的模型精度和控制精度要求更高。因此,WBC已成为高动态运动的有力候选者。WBC基于完整的多体动力学,使系统能够跟踪躯干和脚尖的所需轨迹。[123、124]此外,越来越多的优化变量和任务约束方程增加了对更快硬件计算速度的需求。[122]该方法已成功应用于StarlETH等四足机器人,[125]ANYmal,[124]和 HyQ。[118]基于这种控制方法,在步态规划和切换方面取得了显着改进,[75]应对外力干扰,[126]以及在光滑的表面上导航[127]或松软的地形[128]在机器人运动期间。
为了在四足机器人中实现高动态运动控制,通常需要关节扭矩控制来满足性能要求。但是,这种方法必须求解逆运动学。[129]逆动力学控制中的动力学建模方法一般基于多刚体动力学算法建立整体动力学方程,而不局限于简化的动力学模型。因此,通过逆动力学控制方法实现的模型精度更高。对于四足机器人,常用的基于逆动力学的控制方法包括力控制、[130]力/位置混合控制,[131]阻抗控制,[132]和强大的控制。[133、134]然而,基于整体动态方程的控制系统也存在缺点。由于结构的复杂性和运动过程的可变性,整个动力学方程所需的计算量非常大。这给这些系统的实际应用带来了挑战。[134]除了接触反作用力外,四足机器人在运动过程中还会遇到未知的力,这使得整体动态建模非常困难,对四足机器人的控制提出了很大的挑战。[135]逆动力学的控制方法常用于机械手等固定底座机器人的运动控制[136、137]和并行平台。[138]近年来,基于逆动力学的控制方法取得了显着进展,用于具有浮动底座的机器人,包括两足和四足机器人。这些进步归功于建模技术的优化和计算效率的提高。[139]
未完待续。。。。。
参考:
[1]Fan, Y., Pei, Z., Wang, C., Li, M., Tang, Z., & Liu, Q. A Review of Quadruped Robots: Structure, Control, and Autonomous Motion. Advanced Intelligent Systems, 2300783. https://doi.org/10.1002/aisy.202300783
更多相关文章:

















 2205
2205

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









