







 本文详细介绍了工业机器人工具坐标系(TCF)的三点定位法和六点法标定原理。通过选择精确的固定点和工具参考点,通过不同姿态的碰撞点来计算TCP的位置和姿态。标定过程包括TCP位置标定和姿态标定,涉及到矩阵变换和最小二乘法。最后,文章提到了进行标定时确保点不在同一平面以获得准确解的要求,并引用了相关研究文献。
本文详细介绍了工业机器人工具坐标系(TCF)的三点定位法和六点法标定原理。通过选择精确的固定点和工具参考点,通过不同姿态的碰撞点来计算TCP的位置和姿态。标定过程包括TCP位置标定和姿态标定,涉及到矩阵变换和最小二乘法。最后,文章提到了进行标定时确保点不在同一平面以获得准确解的要求,并引用了相关研究文献。
一、基本步骤
(1)在机器人动作范围内找一个非常精确的固定点作为参考点;
(2)在工具上确定一个参考点(最好是工具中心点Tool Center Point, TCP);
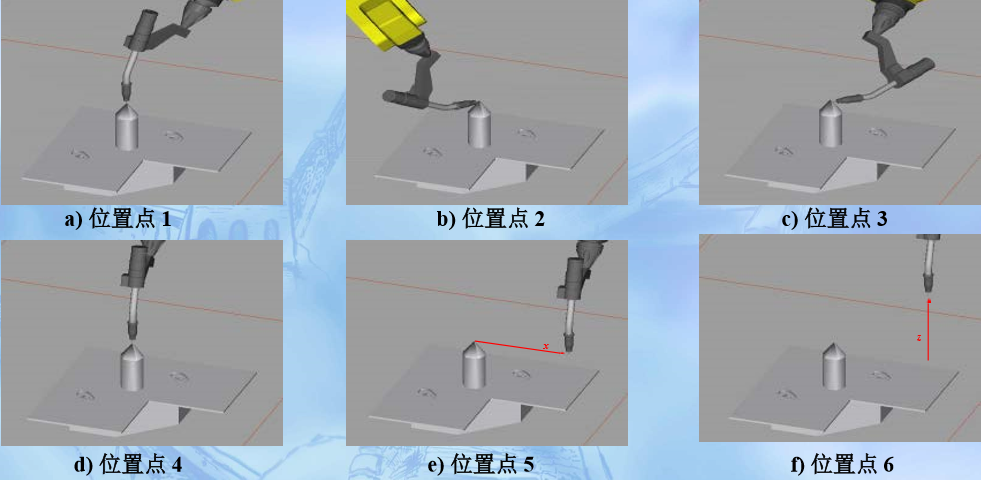
(3)手动操纵机器人的方法移动TCP,以四种不同的工具姿态与固定点刚好碰上。
??前三个点任意姿态,第四点是用工具的参考点垂直于固定点,第五点是工具参考点从固定点向将要设定的TCP的x方向移动,第六点是工具参考点从固定点向将要设定的TCP的在z方向移动,如下图所示:
(4)通过前4个点的位置数据即可计算出TCP的位置,通过后2个点即可确定TCP的姿态
二、标定过程
1、TCP位置标定
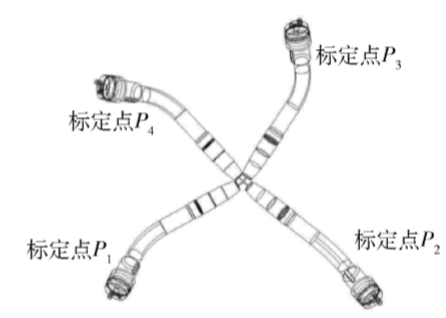
??假设取1、2、3、4四个标定点之间相差90°且不在同一平面上,如下图所示:
??给定如下坐标系定义:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 4692
4692

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









