






文章目录
- 一、基本步骤
- 二、标定过程
- 1、TCP位置标定
- 2、TCF姿态标定
- 3、TCF标定结果
- 三、参考文献
一、基本步骤
(1)在机器人动作范围内找一个非常精确的固定点作为参考点;
(2)在工具上确定一个参考点(最好是工具中心点Tool Center Point, TCP);
(3)手动操纵机器人的方法移动TCP,以四种不同的工具姿态与固定点刚好碰上。
前三个点任意姿态,第四点是用工具的参考点垂直于固定点,第五点是工具参考点从固定点向将要设定的TCP的x方向移动,第六点是工具参考点从固定点向将要设定的TCP的在z方向移动,如下图所示:

(4)通过前4个点的位置数据即可计算出TCP的位置,通过后2个点即可确定TCP的姿态
二、标定过程
1、TCP位置标定
假设取1、2、3、4四个标定点之间相差90°且不在同一平面上,如下图所示:


给定如下坐标系定义:
【1】基坐标系(0坐标系):B
【2】末端坐标系:E
【3】工具坐标系:T
给定如下变换矩阵定义:
【1】末端坐标系 E 相对于基坐标系 B的变换关系 : E B T ^{B}_ {E}T EBT
【2】工具坐标系T 相对于末端坐标系 E的变换关系 : T E T ^{E}_ {T}T TET
【3】工具坐标系T 相对于基坐标系 B的变换关系 : T B T ^{B}_ {T}T TBT
显然可以知道:
E
B
T
⋅
T
E
T
=
T
B
T
(1)
^{B}_ {E}T · ^{E}_ {T}T = ^{B}_ {T}T \tag{1}
EBT⋅TET=TBT(1)
对于选定位置点 i = 1、2、3、4,有:
【1】
E
B
T
^{B}_ {E}T
EBT不等,设:
E
B
T
=
[
E
B
R
i
B
P
E
i
0
1
]
(2)
^{B}_ {E}T = \begin{bmatrix} \pmb{^{B}_ {E}R_{i}} & \pmb{^{B}P_ {Ei}}\\ 0 & 1 \\ \end{bmatrix} \tag{2}
EBT=[EBRiEBRiEBRi0BPEiBPEiBPEi1](2)
【2】
T
E
T
^{E}_ {T}T
TET不等,但其位置
E
P
T
^{E}P_ {T}
EPT相等,设:
T
E
T
=
[
T
E
R
i
E
P
T
0
1
]
(3)
^{E}_ {T}T = \begin{bmatrix} ^{E}_ {T}R_ {i} & \pmb{^{E}P_ {T}} \\ 0 & \pmb{1} \\ \end{bmatrix} \tag{3}
TET=[TERi0EPTEPTEPT111](3)
【3】
T
B
T
^{B}_ {T}T
TBT 不等,但其位置
E
P
T
^{E}P_ {T}
EPT相等,设:
T
B
T
=
[
T
B
R
i
B
P
T
0
1
]
(4)
^{B}_ {T}T = \begin{bmatrix} ^{B}_ {T}R_ {i} & \pmb{^{B}P_ {T}}\\ 0 & 1 \\ \end{bmatrix} \tag{4}
TBT=[TBRi0BPTBPTBPT1](4)
关注公式(2)、(3)、(4)中加粗符号,有:
E
B
R
i
⋅
E
P
T
+
B
P
E
i
=
B
P
T
(5)
\pmb{^{B}_ {E}R_ {i}} · \pmb{^{E}P_ {T}} + \pmb{^{B}P_ {Ei}} = \pmb{^{B}P_ {T}} \tag{5}
EBRiEBRiEBRi⋅EPTEPTEPT+BPEiBPEiBPEi=BPTBPTBPT(5)
在实际中,
E
B
T
^{B}_ {E}T
EBT 由机器人正解方程可以直接测得,因此,我们直接读取四个位置点的姿态
E
B
R
i
^{B}_ {E}R_ {i}
EBRi和位置
B
P
E
i
=
1
,
2
,
3
,
4
^{B}P_ {Ei = 1, 2, 3, 4}
BPEi=1,2,3,4。假设:
E
B
R
1
⋅
E
P
T
+
B
P
E
1
=
B
P
T
(6)
^{B}_ {E}R_ {1}· ^{E}P_ {T} + ^{B}P_ {E1} = ^{B}P_ {T} \tag{6}
EBR1⋅EPT+BPE1=BPT(6)
E
B
R
2
⋅
E
P
T
+
B
P
E
2
=
B
P
T
(7)
^{B}_ {E}R_ {2}· ^{E}P_ {T} + ^{B}P_ {E2} = ^{B}P_ {T} \tag{7}
EBR2⋅EPT+BPE2=BPT(7)
则,(6) - (7)得:
(
E
B
R
1
−
E
B
R
2
)
⋅
E
P
T
=
B
P
E
2
−
B
P
E
1
(8)
(^{B}_ {E}R_ {1} - ^{B}_ {E}R_ {2} )· ^{E}P_ {T} = ^{B}P_ {E2} - ^{B}P_ {E1} \tag{8}
(EBR1−EBR2)⋅EPT=BPE2−BPE1(8)
同理可得:
(
E
B
R
2
−
E
B
R
3
)
⋅
E
P
T
=
B
P
E
3
−
B
P
E
2
(9)
(^{B}_ {E}R_ {2} - ^{B}_ {E}R_ {3} )· ^{E}P_ {T} = ^{B}P_ {E3} - ^{B}P_ {E2} \tag{9}
(EBR2−EBR3)⋅EPT=BPE3−BPE2(9)
(
E
B
R
3
−
E
B
R
4
)
⋅
E
P
T
=
B
P
E
4
−
B
P
E
3
(10)
(^{B}_ {E}R_ {3} - ^{B}_ {E}R_ {4} )· ^{E}P_ {T} = ^{B}P_ {E4} - ^{B}P_ {E3} \tag{10}
(EBR3−EBR4)⋅EPT=BPE4−BPE3(10)
由(8)、(9)、(10)可得:
[
E
B
R
1
−
E
B
R
2
E
B
R
2
−
E
B
R
3
E
B
R
3
−
E
B
R
4
]
⋅
E
P
T
=
[
B
P
E
2
−
B
P
E
1
B
P
E
3
−
B
P
E
2
B
P
E
4
−
B
P
E
3
]
(11)
\begin{bmatrix} ^{B}_ {E}R_ {1} - ^{B}_ {E}R_ {2}\\ ^{B}_ {E}R_ {2} - ^{B}_ {E}R_ {3}\\ ^{B}_ {E}R_ {3} - ^{B}_ {E}R_ {4} \end{bmatrix}· ^{E}P_ {T} = \begin{bmatrix} ^{B}P_ {E2} - ^{B}P_ {E1}\\ ^{B}P_ {E3} - ^{B}P_ {E2}\\ ^{B}P_ {E4} - ^{B}P_ {E3} \end{bmatrix} \tag{11}
⎣⎡EBR1−EBR2EBR2−EBR3EBR3−EBR4⎦⎤⋅EPT=⎣⎡BPE2−BPE1BPE3−BPE2BPE4−BPE3⎦⎤(11)
由于
E
P
T
^{E}P_ {T}
EPT为 3x1 列向量,而等式右边为 9x3的矩阵,因此方程(11)为不相容方程组,不可直接用非齐次线性方程组求解的方法或者solve求解。采用最小二乘法的矩阵形式,因其系数矩阵不是方阵,不可直接求逆, 因此使用广义逆。采用高斯消元法得到:
E
P
T
=
[
E
B
R
1
−
E
B
R
2
E
B
R
2
−
E
B
R
3
E
B
R
3
−
E
B
R
4
]
\
[
B
P
E
2
−
B
P
E
1
B
P
E
3
−
B
P
E
2
B
P
E
4
−
B
P
E
3
]
(12)
^{E}P_ {T} = \begin{bmatrix} ^{B}_ {E}R_ {1} - ^{B}_ {E}R_ {2}\\ ^{B}_ {E}R_ {2} - ^{B}_ {E}R_ {3}\\ ^{B}_ {E}R_ {3} - ^{B}_ {E}R_ {4} \end{bmatrix}\verb|\| \begin{bmatrix} ^{B}P_ {E2} - ^{B}P_ {E1}\\ ^{B}P_ {E3} - ^{B}P_ {E2}\\ ^{B}P_ {E4} - ^{B}P_ {E3} \end{bmatrix} \tag{12}
EPT=⎣⎡EBR1−EBR2EBR2−EBR3EBR3−EBR4⎦⎤\⎣⎡BPE2−BPE1BPE3−BPE2BPE4−BPE3⎦⎤(12)
则式(12)所求得的
E
P
T
^{E}P_ {T}
EPT即为TCP的位置向量。
2、TCF姿态标定
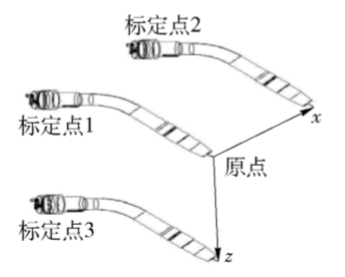
在第1部分已经得到工具坐标系(TCF)的位置,而计算TCP姿态采用z/x方向标定。
此过程中TCF的姿态保持不变(如第一节 – 基本步骤中图所示)。取第一个姿态标定点为位置点4(下图记作标定点1);机器人从位置点4出发,沿+x方向移动一定距离得到位置点5(下图记作标定点2);机器人从位置点4出发,沿+z方向移动一定距离得到位置点6(下图记作标定点3)。如下图所示:
由于3个标定点中的TCF姿态不变,故
E
B
R
i
=
4
,
5
,
6
^{B}_ {E}R_{i = 4,5,6}
EBRi=4,5,6均相等,且由(12)得
E
P
T
^{E}P_ {T}
EPT 保持不变,故可得到工具坐标系 T 的 x 轴轴向向量
X
X
X ,且:
X
=
B
P
E
5
−
B
P
E
4
(13)
X = ^{B}P_ {E5} - ^{B}P_ {E4} \tag{13}
X=BPE5−BPE4(13)
同理,可得到工具坐标系 T 的 z 轴轴向向量
Z
Z
Z ,且:
Z
=
B
P
E
6
−
B
P
E
4
(14)
Z = ^{B}P_ {E6} - ^{B}P_ {E4} \tag{14}
Z=BPE6−BPE4(14)
进而由右手定则得工具坐标系 T 的 y 轴轴向向量
Y
Y
Y :
Y
=
Z
×
X
(15)
Y = Z \times X\tag{15}
Y=Z×X(15)
为进一步保证坐标系矢量的正交性,重新计算
Z
Z
Z :
Z
=
X
×
Y
(16)
Z = X \times Y \tag{16}
Z=X×Y(16)
将(13)、(15)、(16)单位化得到
X
′
,
Y
′
,
Z
′
X^{'}, Y^{'}, Z^{'}
X′,Y′,Z′,得到工具坐标 T 相对于基坐标 B 的姿态
T
B
R
^{B}_ {T}R
TBR,且
T
B
R
=
[
X
′
Y
′
Z
′
]
(17)
^{B}_ {T}R = \begin{bmatrix}X^{'} Y^{'} Z^{'} \end{bmatrix} \tag{17}
TBR=[X′Y′Z′](17)
又末端坐标系 E 旋转矩阵为
E
B
R
^{B}_ {E}R
EBR,且:
E
B
R
T
E
R
=
T
B
R
(18)
^{B}_ {E}R\ ^{E}_ {T}R=^{B}_ {T}R \tag{18}
EBR TER=TBR(18)
故由(17)、(18)即可得到工具坐标系的旋转矩阵
T
E
R
^{E}_ {T}R
TER,即:
T
E
R
=
E
B
R
−
1
T
B
R
(19)
^{E}_ {T}R = ^{B}_ {E}R^{-1}\ ^{B}_ {T}R \tag{19}
TER=EBR−1 TBR(19)
3、TCF标定结果
由(12)和(19),可得到工具坐标系
T
E
T
^{E}_ {T}T
TET 标定为:
T
E
T
=
[
T
E
R
E
P
T
0
1
]
(20)
^{E}_ {T}T = \begin{bmatrix} ^{E}_ {T}R & ^{E}P_ {T} \\ 0 & 1 \end{bmatrix} \tag{20}
TET=[TER0EPT1](20)
显然,TCF六点法标定的最小条件是能够获取到6个位置点的位姿
E
B
T
i
=
1
,
2
,
3
,
4
,
5
,
6
^{B}_ {E}T_{i=1,2,3,4,5,6}
EBTi=1,2,3,4,5,6,且为使式(12)能求解,应保证位置点1,2,3,4不在同一平面上。
三、参考文献
【1】康存锋,王红伟,张鹏飞等.焊接机器人工具坐标系标定的研究与实现[j].北京工业大学学报 2016, 42(1).
【2】兰虎等.《工业机器人技术及应用》.

















 4815
4815

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









