可以使用以下代码实现PointNet深度学习网络:
```
import torch
import torch.nn as nn
import torch.nn.functional as F
class TNet(nn.Module):
def __init__(self, k=3):
super(TNet, self).__init__()
self.k = k
self.conv1 = nn.Conv1d(k, 64, 1)
self.conv2 = nn.Conv1d(64, 128, 1)
self.conv3 = nn.Conv1d(128, 1024, 1)
self.fc1 = nn.Linear(1024, 512)
self.fc2 = nn.Linear(512, 256)
self.fc3 = nn.Linear(256, k*k)
self.bn1 = nn.BatchNorm1d(64)
self.bn2 = nn.BatchNorm1d(128)
self.bn3 = nn.BatchNorm1d(1024)
self.bn4 = nn.BatchNorm1d(512)
self.bn5 = nn.BatchNorm1d(256)
self.transform = nn.Parameter(torch.eye(k).unsqueeze(0))
def forward(self, x):
batchsize = x.size()[0]
x = F.relu(self.bn1(self.conv1(x)))
x = F.relu(self.bn2(self.conv2(x)))
x = F.relu(self.bn3(self.conv3(x)))
x = torch.max(x, 2, keepdim=True)[0]
x = x.view(-1, 1024)
x = F.relu(self.bn4(self.fc1(x)))
x = F.relu(self.bn5(self.fc2(x)))
x = self.fc3(x)
iden = torch.eye(self.k).view(1, self.k*self.k).repeat(batchsize, 1)
if x.is_cuda:
iden = iden.cuda()
x = x + iden
x = x.view(-1, self.k, self.k)
return x
class STN3d(nn.Module):
def __init__(self, k=3):
super(STN3d, self).__init__()
self.k = k
self.conv1 = nn.Conv1d(k, 64, 1)
self.conv2 = nn.Conv1d(64, 128, 1)
self.conv3 = nn.Conv1d(128, 1024, 1)
self.fc1 = nn.Linear(1024, 512)
self.fc2 = nn.Linear(512, 256)
self.fc3 = nn.Linear(256, k*k)
self.bn1 = nn.BatchNorm1d(64)
self.bn2 = nn.BatchNorm1d(128)
self.bn3 = nn.BatchNorm1d(1024)
self.bn4 = nn.BatchNorm1d(512)
self.bn5 = nn.BatchNorm1d(256)
self.transform = nn.Parameter(torch.zeros(batchsize, self.k, self.k))
nn.init.constant_(self.transform, 0)
def forward(self, x):
batchsize = x.size()[0]
x = F.relu(self.bn1(self.conv1(x)))
x = F.relu(self.bn2(self.conv2(x)))
x = F.relu(self.bn3(self.conv3(x)))
x = torch.max(x, 2, keepdim=True)[0]
x = x.view(-1, 1024)
x = F.relu(self.bn4(self.fc1(x)))
x = F.relu(self.bn5(self.fc2(x)))
x = self.fc3(x)
iden = torch.eye(self.k).view(1, self.k*self.k).repeat(batchsize, 1)
if x.is_cuda:
iden = iden.cuda()
x = x + iden
x = x.view(-1, self.k, self.k)
return x
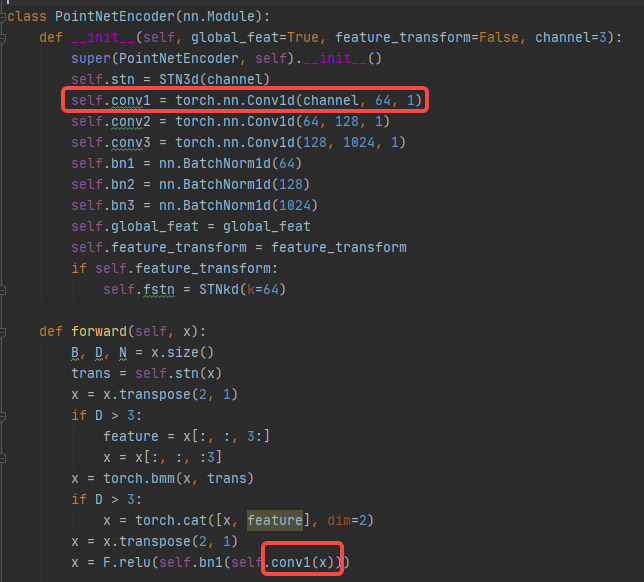
class PointNetEncoder(nn.Module):
def __init__(self, global_feat=True, feature_transform=False):
super(PointNetEncoder, self).__init__()
self.stn = STN3d()
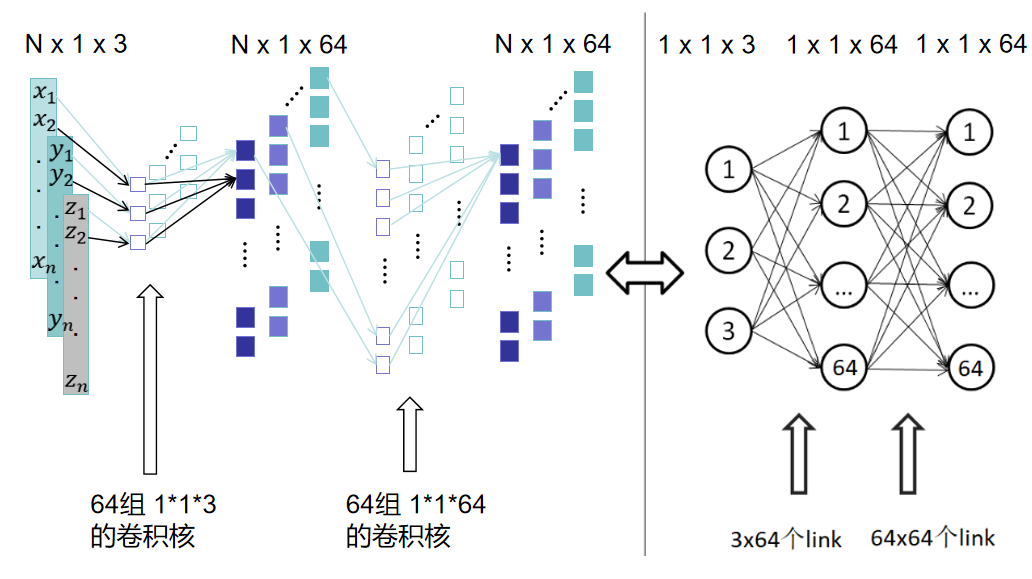
self.conv1 = nn.Conv1d(3, 64, 1)
self.conv2 = nn.Conv1d(64, 128, 1)
self.conv3 = nn.Conv1d(128, 1024, 1)
self.bn1 = nn.BatchNorm1d(64)
self.bn2 = nn.BatchNorm1d(128)
self.bn3 = nn.BatchNorm1d(1024)
self.global_feat = global_feat
self.feature_transform = feature_transform
if self.feature_transform:
self.fstn = TNet(k=64)
def forward(self, x):
n_pts = x.size()[2]
trans = self.stn(x)
x = x.transpose(2, 1)
x = torch.bmm(x, trans)
x = x.transpose(2, 1)
x = F.relu(self.bn1(self.conv1(x)))
if self.feature_transform:
trans_feat = self.fstn(x)
x = x.transpose(2,1)
x = torch.bmm(x, trans_feat)
x = x.transpose(2,1)
else:
trans_feat = None
x = F.relu(self.bn2(self.conv2(x)))
x = self.bn3(self.conv3(x))
x = torch.max(x, 2, keepdim=True)[0]
x = x.view(-1, 1024)
if self.global_feat:
return x, trans, trans_feat
else:
x = x.view(-1, 1024, 1).repeat(1, 1, n_pts)
return torch.cat([x, trans], 1), trans_feat
class PointNetDecoder(nn.Module):
def __init__(self, feature_transform=False):
super(PointNetDecoder, self).__init__()
self.feature_transform = feature_transform
if self.feature_transform:
self.fstn = TNet(k=128)
self.conv1 = nn.Conv1d(1088, 512, 1)
self.conv2 = nn.Conv1d(512, 256, 1)
self.conv3 = nn.Conv1d(256, 128, 1)
self.conv4 = nn.Conv1d(128, 3, 1)
self.bn1 = nn.BatchNorm1d(512)
self.bn2 = nn.BatchNorm1d(256)
self.bn3 = nn.BatchNorm1d(128)
def forward(self, x, trans, trans_feat):
n_pts = x.size()[2]
x = F.relu(self.bn1(self.conv1(x)))
if self.feature_transform:
x = x.transpose(2,1)
trans_feat = self.fstn(x)
x = x.transpose(2,1)
x = F.relu(self.bn2(self.conv2(x)))
x = F.relu(self.bn3(self.conv3(x)))
x = self.conv4(x)
x = x.transpose(2,1)
x = torch.bmm(x, trans)
x = x.transpose(2,1)
return x
class PointNet(nn.Module):
def __init__(self, feature_transform=False):
super(PointNet, self).__init__()
self.feature_transform = feature_transform
self.encoder = PointNetEncoder(global_feat=True, feature_transform=self.feature_transform)
self.decoder = PointNetDecoder(feature_transform=self.feature_transform)
def forward(self, x):
x, trans, trans_feat = self.encoder(x)
x = self.decoder(x, trans, trans_feat)
return x
```
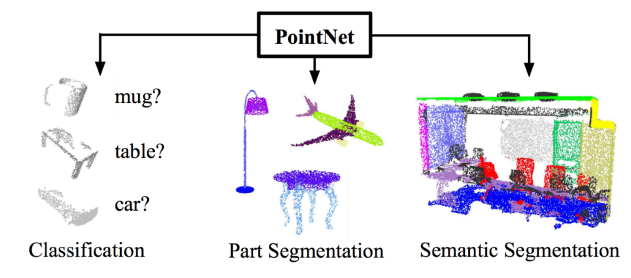
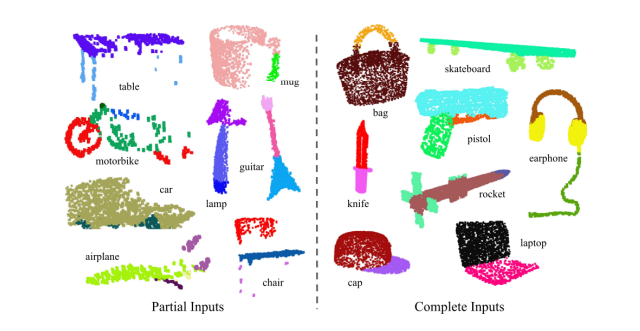
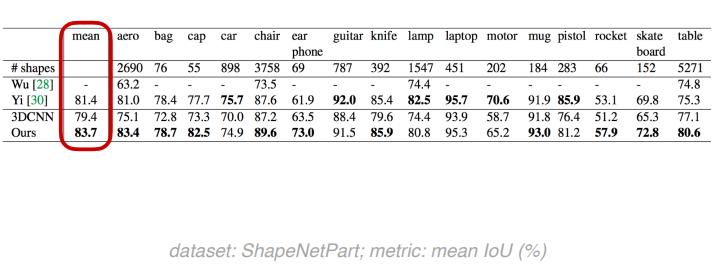
这个代码实现了一个PointNet深度学习网络,可以用于点云分类、分割和重建等任务。























 5万+
5万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









