







功能包下载链接:https://download.csdn.net/download/qq_42145185/11256475
Magician Robotarm
======
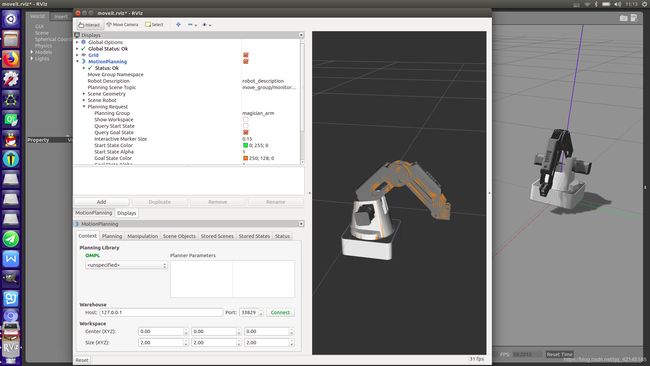
本文件夹中包含了多个为Magician机械臂提供ROS支持的软件包。推荐的运行环境为 Ubuntu 16.04 + ROS Kinetic 或 Ubuntu 18.04 + ROS Melodic,其他环境下的运行情况没有测试过。
#### Ubuntu 16.04 + ROS Kinetic
*
功能包下载链接:https://download.csdn.net/download/qq_42145185/11256475
Magician Robotarm
======
本文件夹中包含了多个为Magician机械臂提供ROS支持的软件包。推荐的运行环境为 Ubuntu 16.04 + ROS Kinetic 或 Ubuntu 18.04 + ROS Melodic,其他环境下的运行情况没有测试过。
#### Ubuntu 16.04 + ROS Kinetic
*











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 5753
5753





