







学校实验室正好有一台 Dobot Magician 机械臂,为了全面学习机械臂,我将只拿一个urdf模型开始到仿真再到控制实体抓取。
Dobot Magician:
Dobot Magician 机械臂是一款桌面级智能机械臂,支持示教再现、脚本控制、 Blockly 图形化编程、写字画画、激光雕刻、3D 打印、视觉识别等功能,还具有丰富的 I/O 扩展接口,供用户二次开发时使用。
Dobot Magician urdf包的下载:https://download.csdn.net/download/weixin_64037619/86988765
1、将包放在工作空间下进行编译;
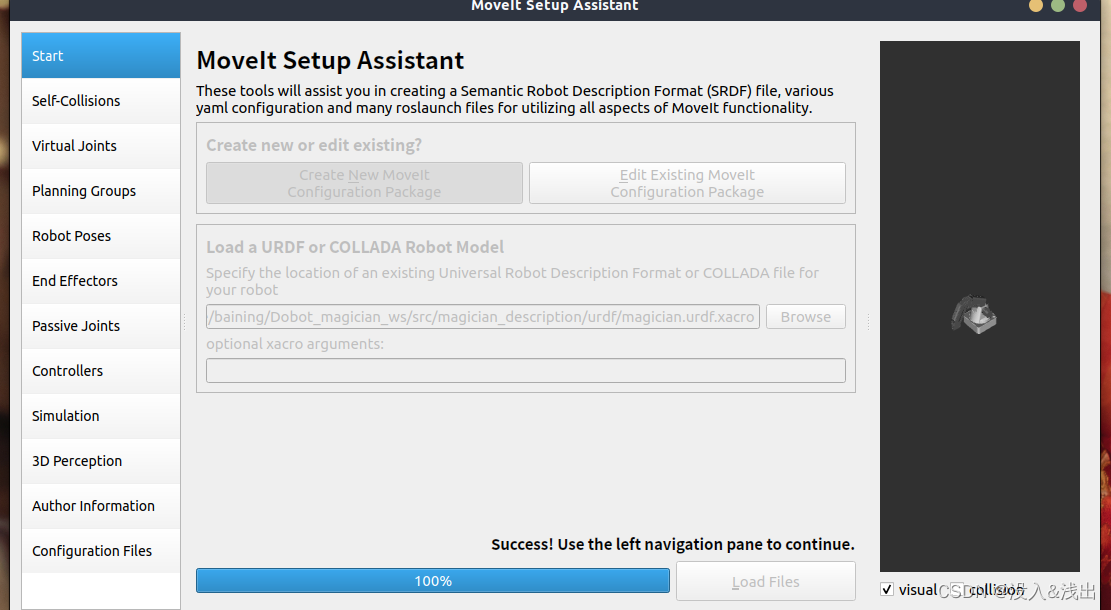
2、配置moveit
(1)、添加机械臂模型:magician.urdf.xacro
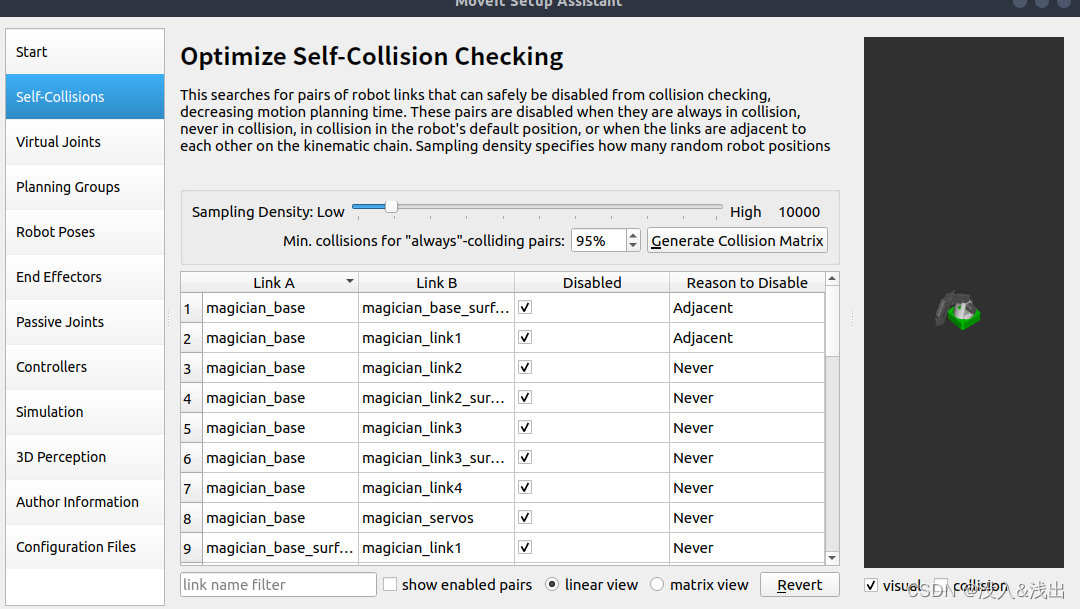
(2)、碰撞检测:直接点 cenerate collision Matrix 就可以
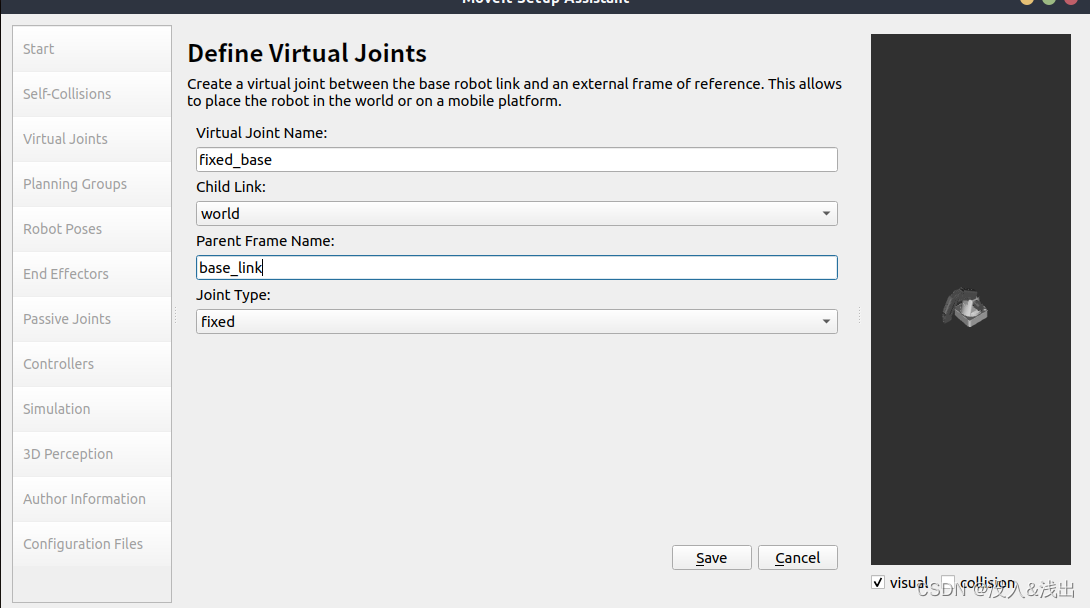
(3)添加虚拟关节
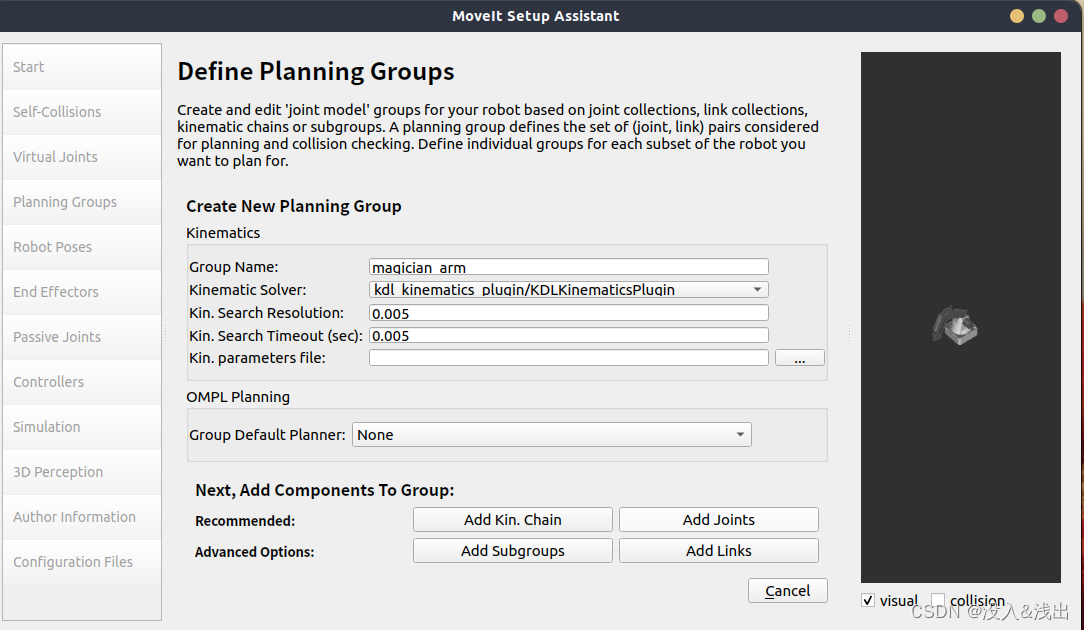
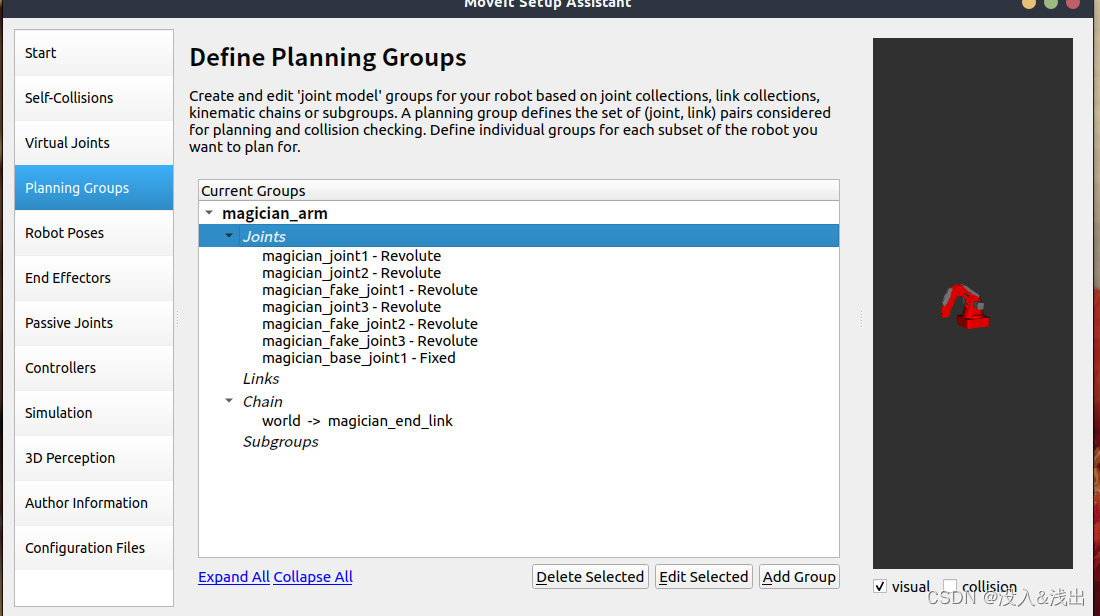
(4)添加规划组
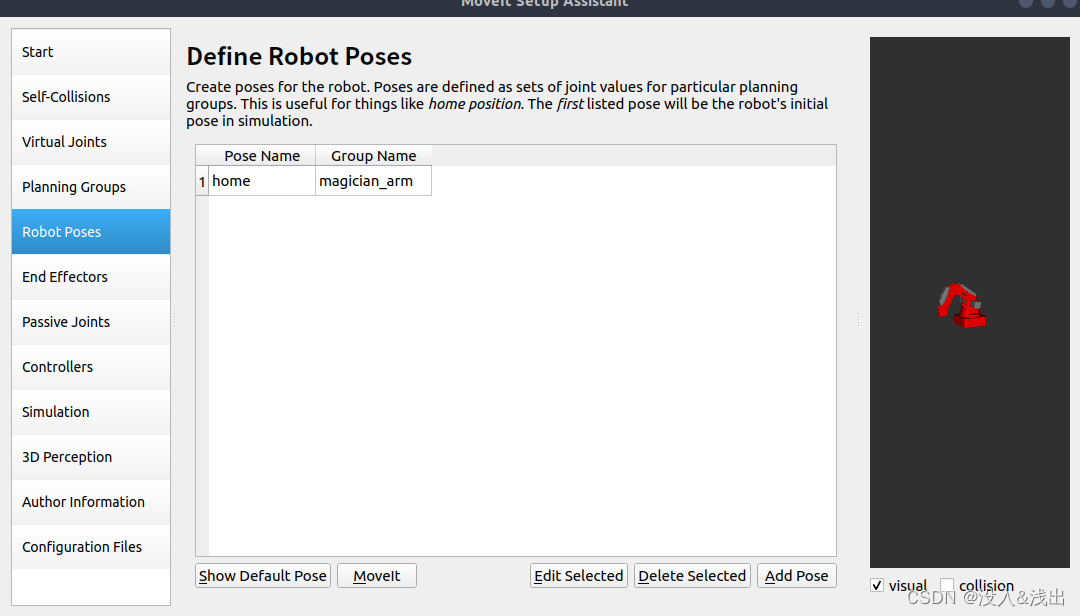
(5) 自定义机械臂位姿
最后导出moveit包,并且进行编译。
运行demo.launch


















 1014
1014

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











