







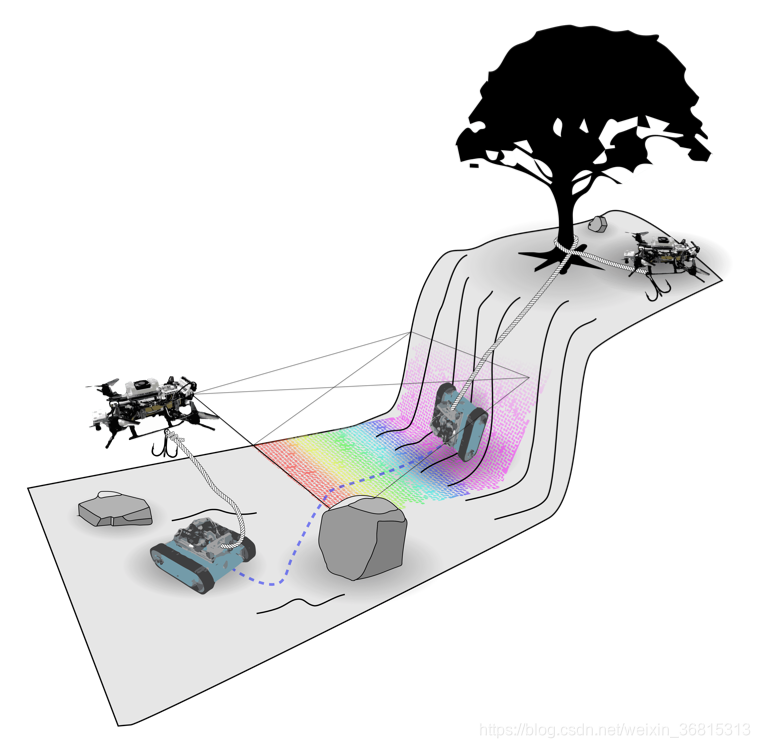
UAV/UGV Autonomous Cooperation: UAV assists UGV to climb a cliff by attaching a tether
1 Introduction
2 Proposed System
2.1 System overview
2.2 Mission
3 UAV System Overview
3.1 Hardware
3.2 System
VIO (Visual Inertial Odometry)
MSF (Multi Sensor Fusion)
MPC (Model Predictive Control)
3.2.1 VIO
3.2.2 Sensor Fusion
3.2.3 Obstacle Avoidance
3.2.4 Control
4 UGV System Overview
4.1 Hardware
4.2 System
Pure Pursuit algorithm
4.2.1 Map filtering
ToF camera
4.2.2 Path planning
4.2.3 Cliff detection
4.2.4 Landing Pose Search
5 Tether Attachment
5.1 Comparison of the tether attachment methods
5.1.1 Using a grappling hook
5.2 Anchor point detection
6 Experimental Result
6.1 UAV navigation
6.2 UGV Climbing
6.3 Tether attachment validation
6.4 Whole mission
7 Conclusion
[ ICRA2019 ] UAV/UGV Autonomous Cooperation: UAV assists UGV to climb a cliff by attaching a tether















 2583
2583











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











