







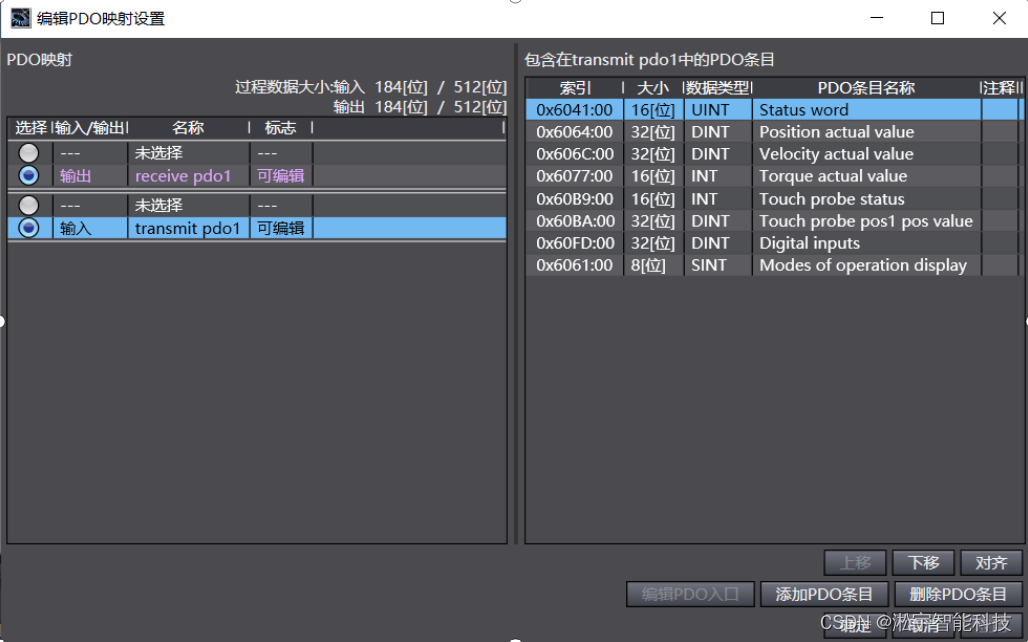
选择单击左侧“配置和设置”,双击“EtherCAT”,选择从设备,单击“编辑PDO映射设置”
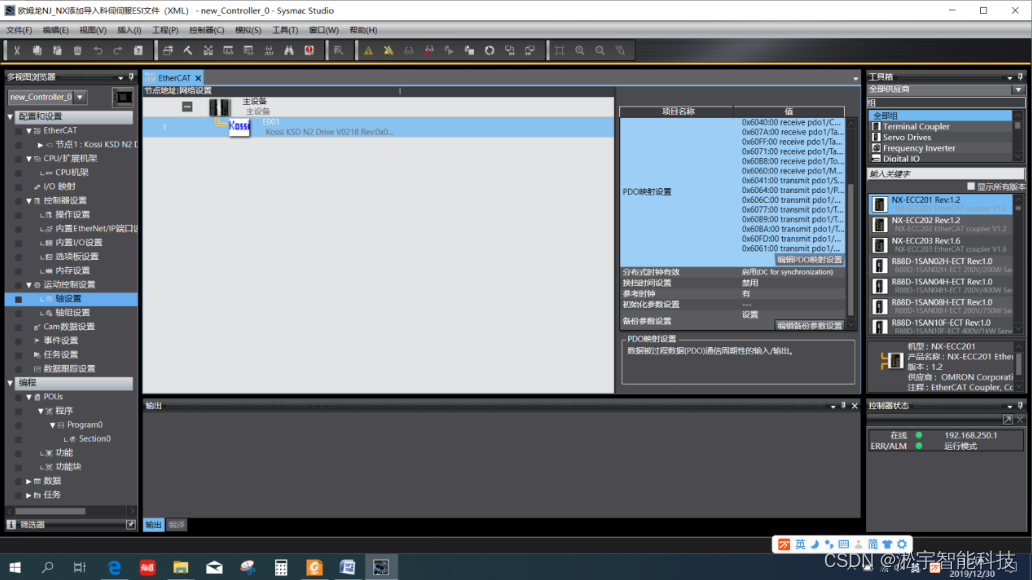
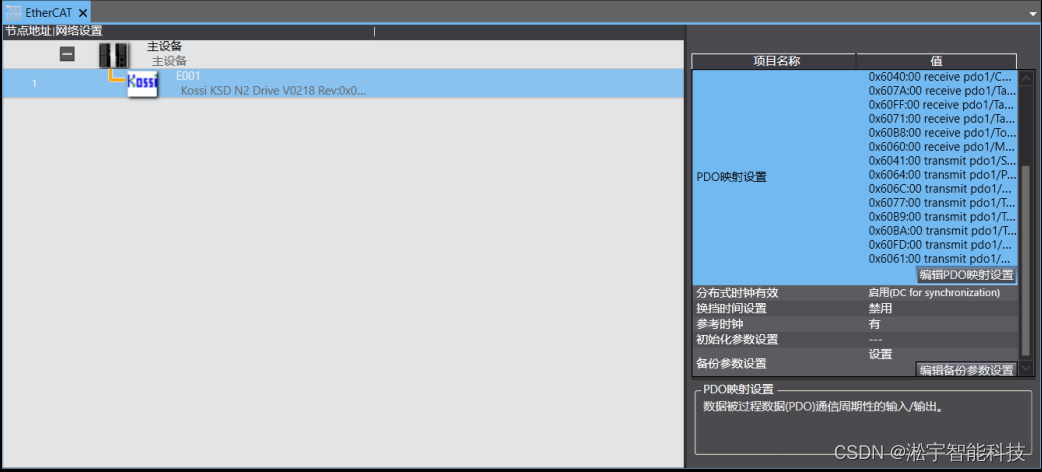
配置伺服所需PDO
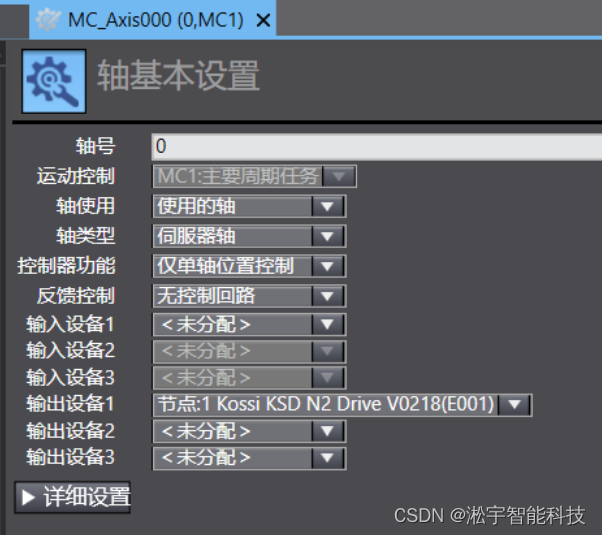
选择单击左侧“配置和设置”下的“运动控制设置”,然后右键“轴设置”,添加“运动控制轴/单轴位置控制轴”,添完轴后双击轴,选择“轴基本设置”,轴类型:伺服器轴,输出设备1:选择相应节点控制轴。
连接轴所使用的PDO表
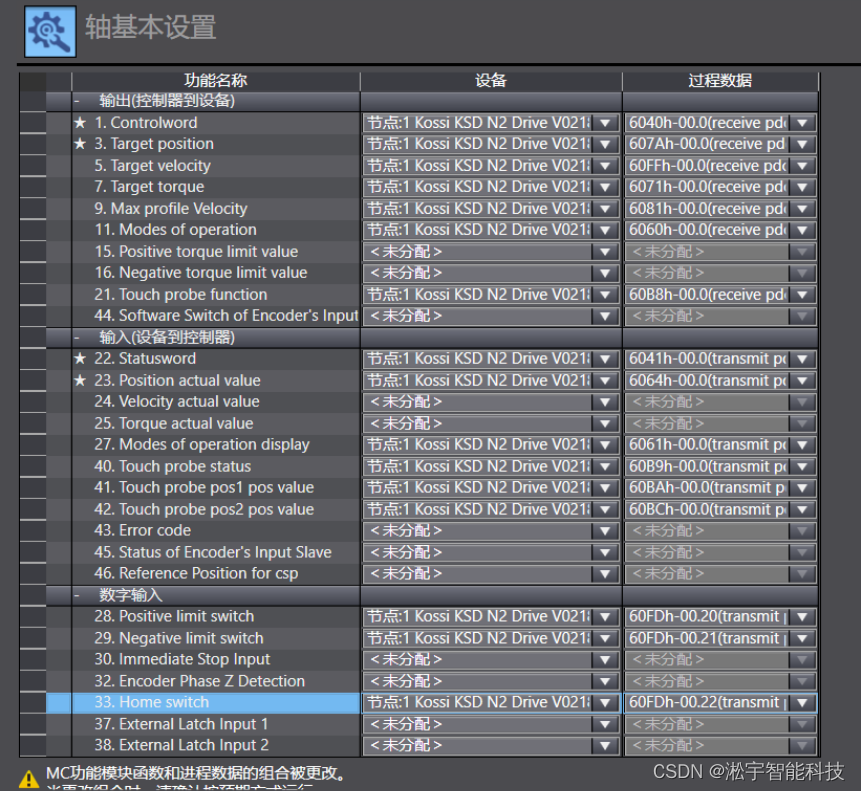
注:N2驱动输入DI1-DI5分别对应60FD.20、60FD.21、60FD.22、60FD.23、60FD.24
N2驱动输出DO1-DO4分别对应60FE_1.16、60FE_1.17、60FE_1.18、60FE_1.19


















 719
719

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











