







 本文介绍了无人驾驶课程中关于路径规划的理论,包括最大曲率限制的运动学约束、参数化曲线的概念以及路径优化。重点讨论了五次样条和三次螺旋线在路径规划中的应用,分析了五次样条曲率计算的复杂性和三次螺旋线的曲率约束优势。总结了路径规划问题的关键点和样条、螺旋线的优缺点。
本文介绍了无人驾驶课程中关于路径规划的理论,包括最大曲率限制的运动学约束、参数化曲线的概念以及路径优化。重点讨论了五次样条和三次螺旋线在路径规划中的应用,分析了五次样条曲率计算的复杂性和三次螺旋线的曲率约束优势。总结了路径规划问题的关键点和样条、螺旋线的优缺点。
作为Coursera第四章FinalProject的理论准备,整理了Coursera无人驾驶课程4.7.1 parametric curves的笔记。
目录
学习目标
- 理解路径规划问题及其约束和边界条件
- 知道参数曲线是什么
- 描述在路径规划领域使用样条曲线和螺旋线的优缺点
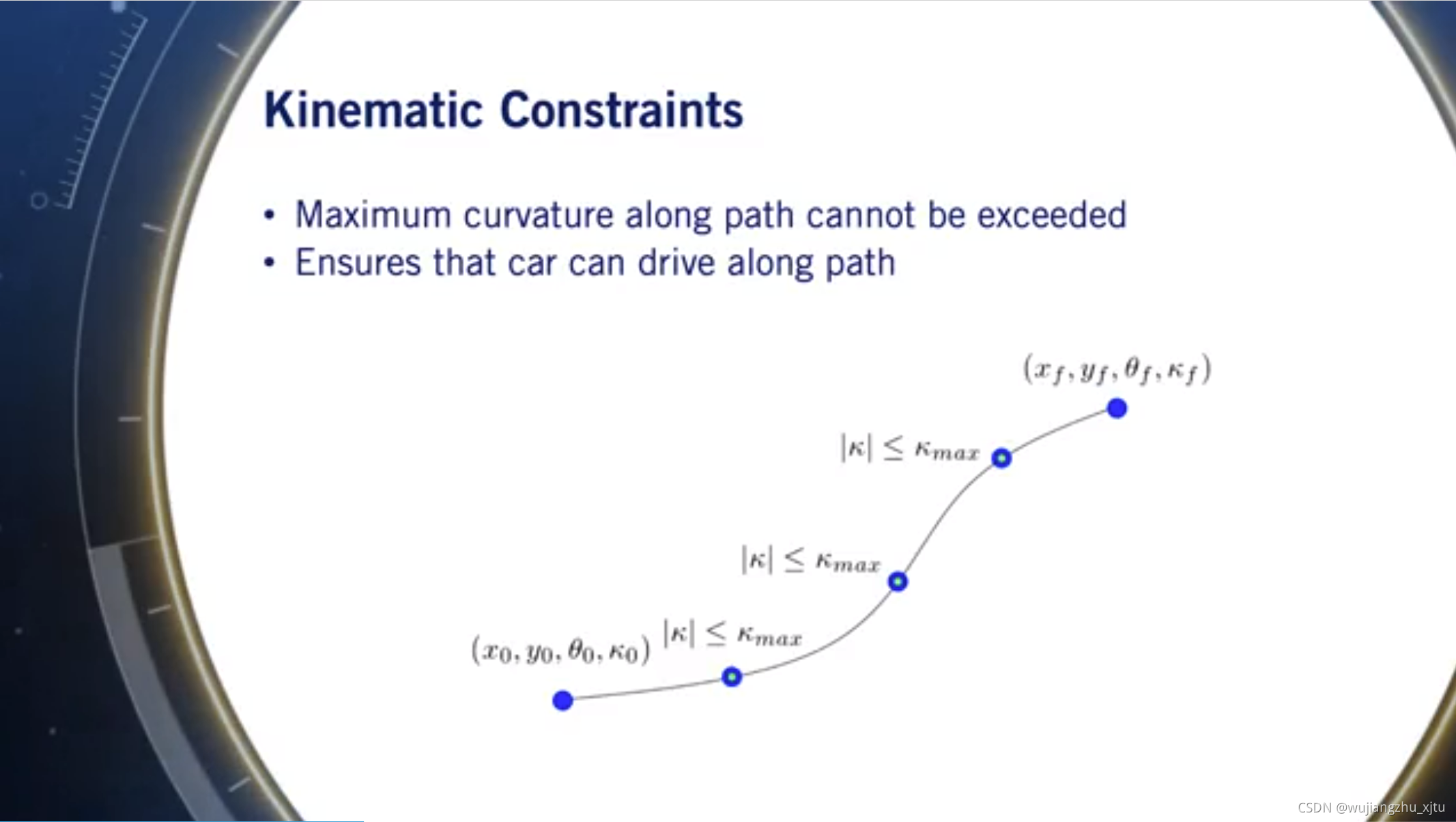
运动学约束
最大曲率限制:因为车辆有最小转弯半径,意味着车辆能走的路径的曲率不能超过最大值。
通常为了计算简便,通过对曲线上几个点的曲率进行限制达到约束整条曲线的目的。
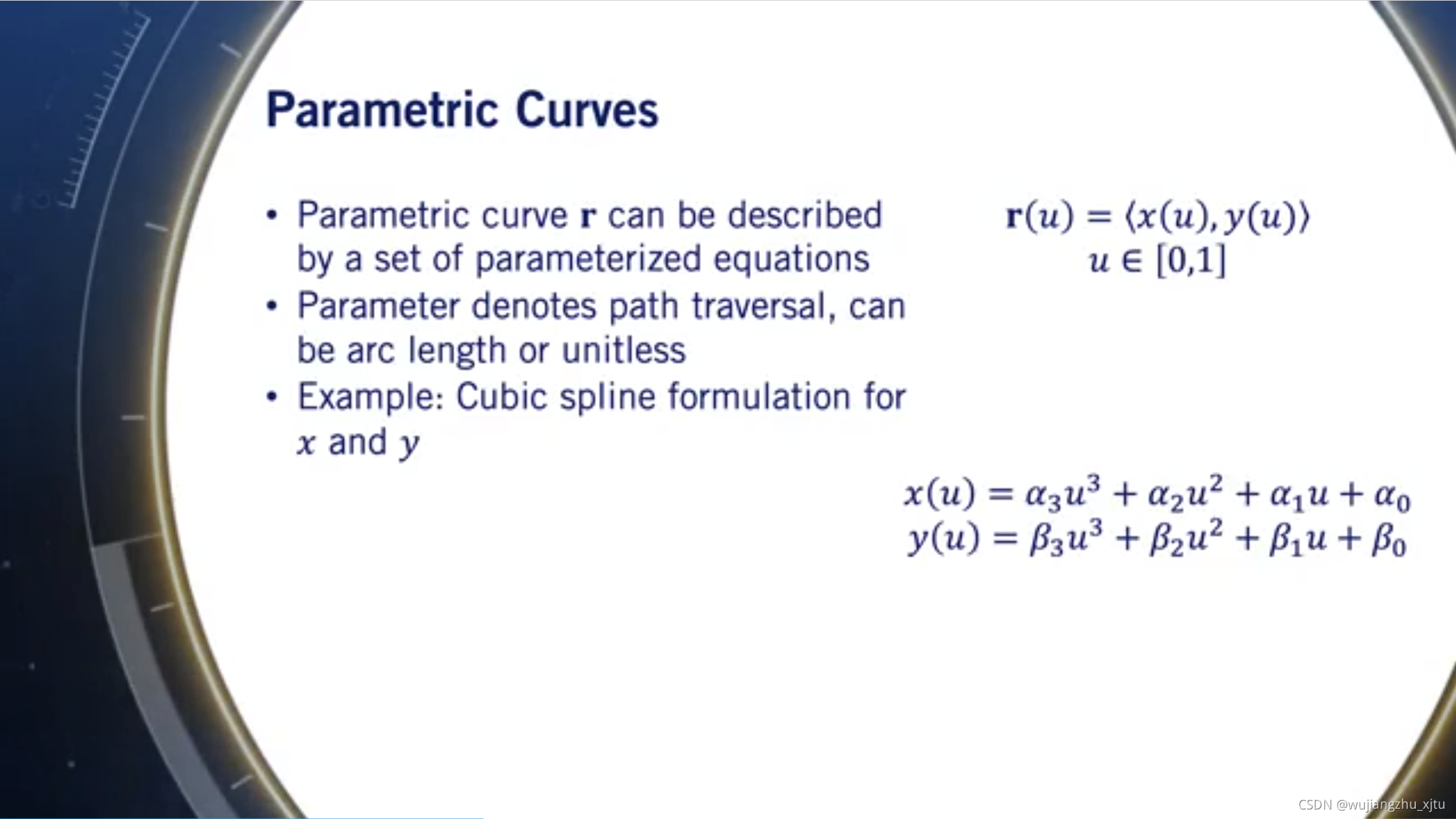
参数化曲线
原本y=y(x)的曲线写成x(u),y(u)的形式,x,y的值都由参数u来确定,通过u来遍历整条曲线。
参数u可以是弧长,也可以是无量纲的[0,1] 0代表起点,1代表终点。
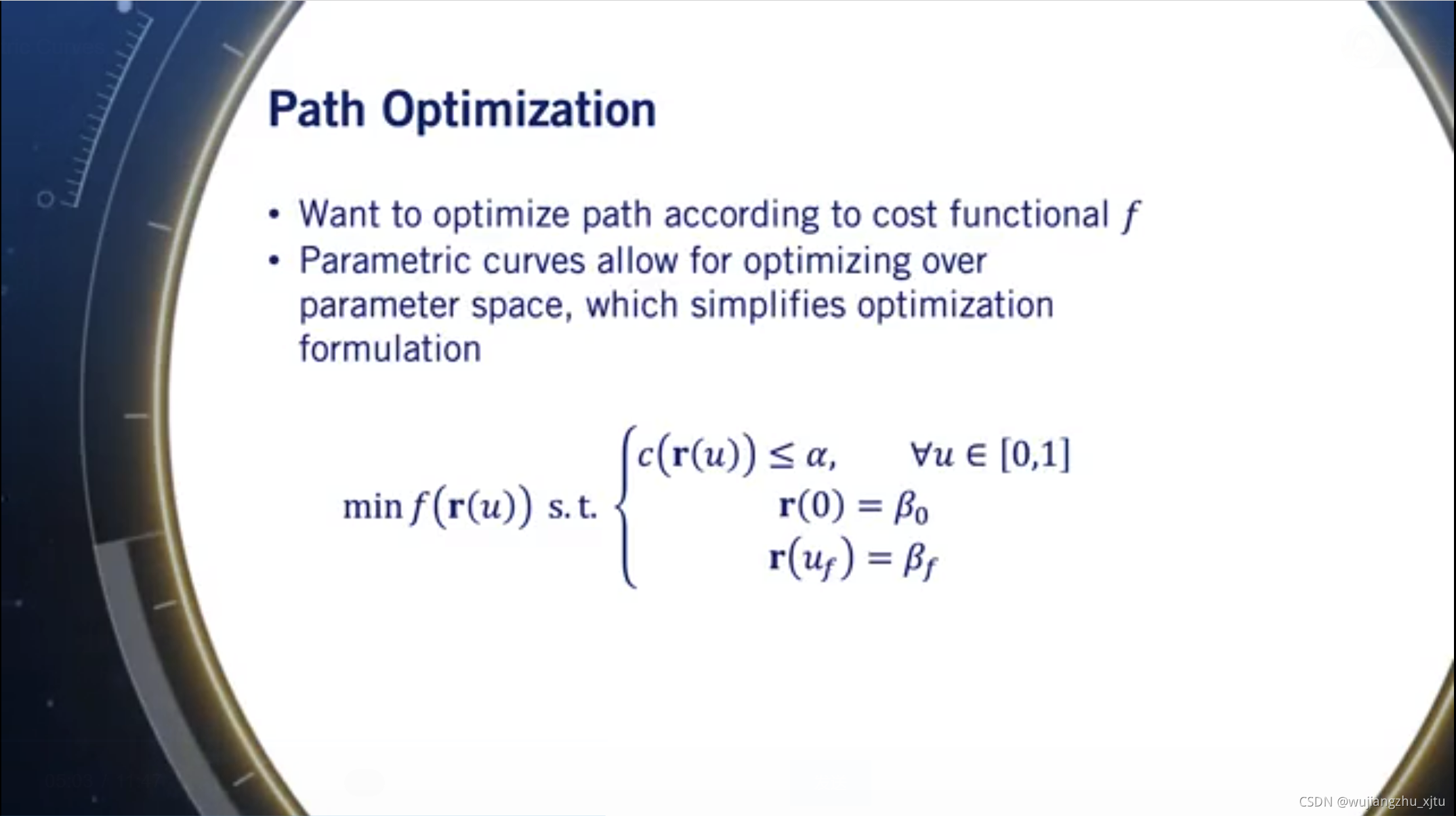
路径优化
通过代价函数f来优化路径,参数化曲线允许在参数空间优化,可以简化优化的表达式。
分别是约束c(r(u))≤α和边界条件r(0)=β0, r(uf)=βf
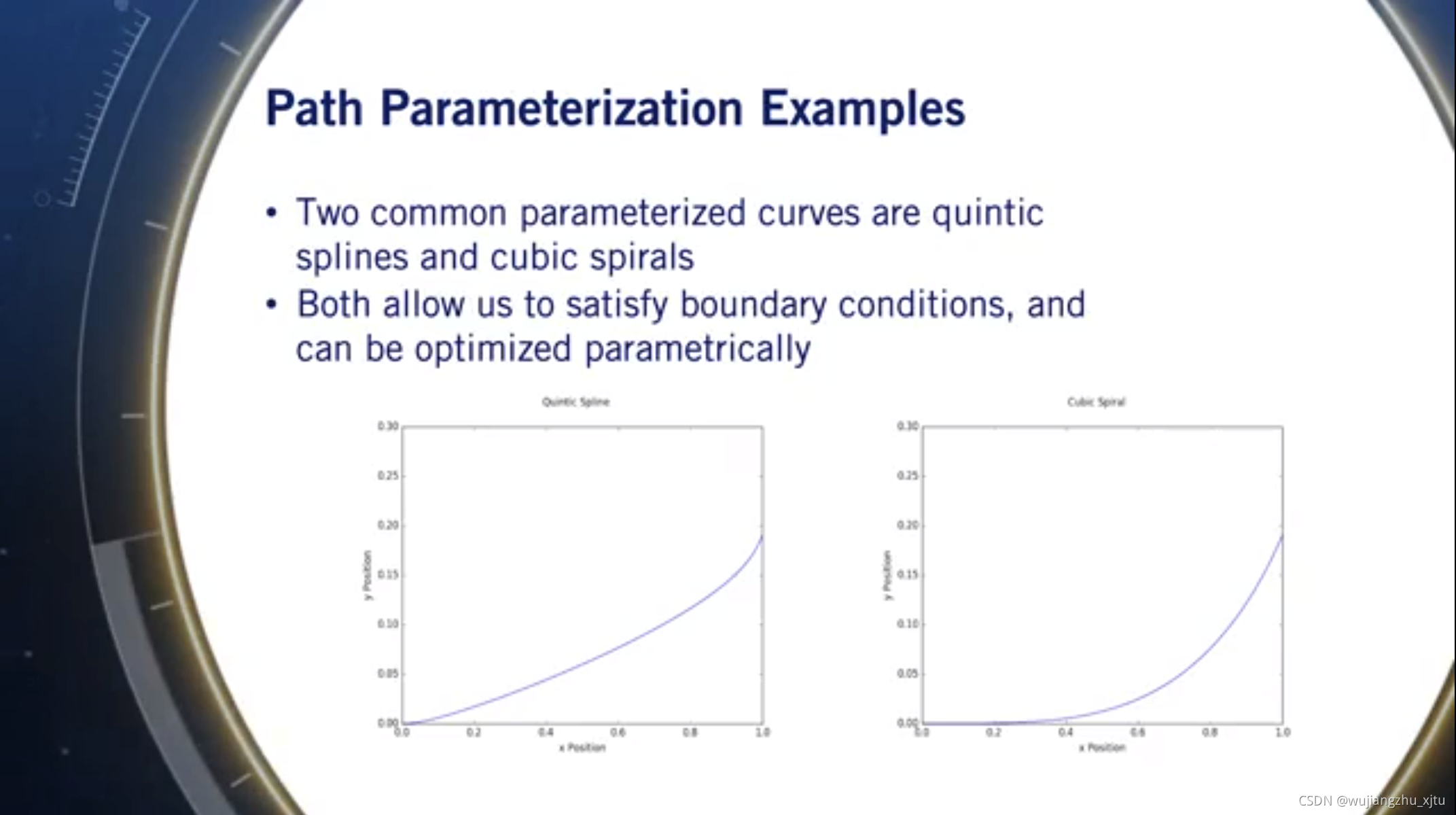
路径参数化例子
两个常用的参数化曲线是五次多项式和三次螺旋线
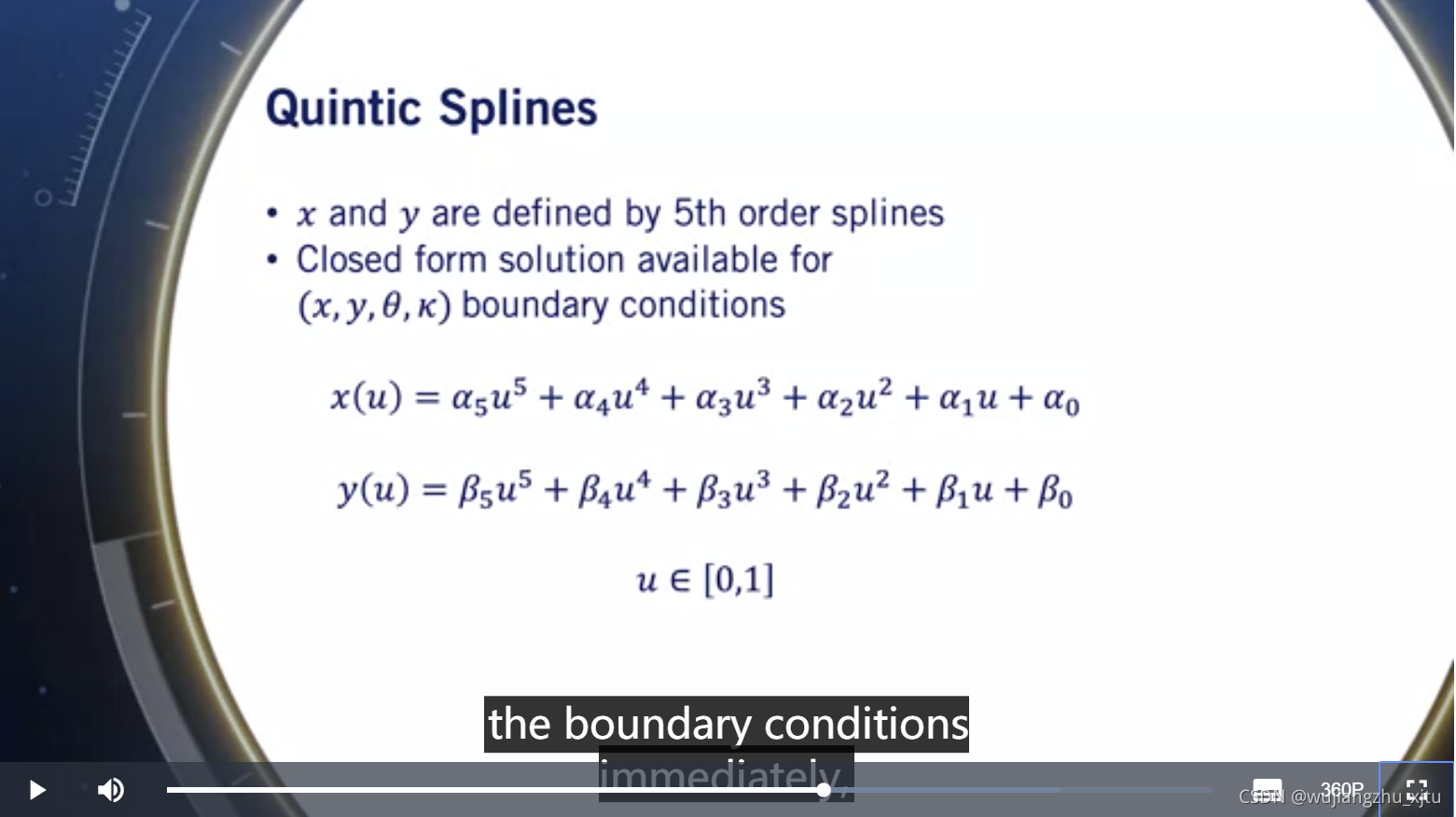
五次样条
x,y都是u的5次多项式,对于边界条件存在解析解(closed form solution)
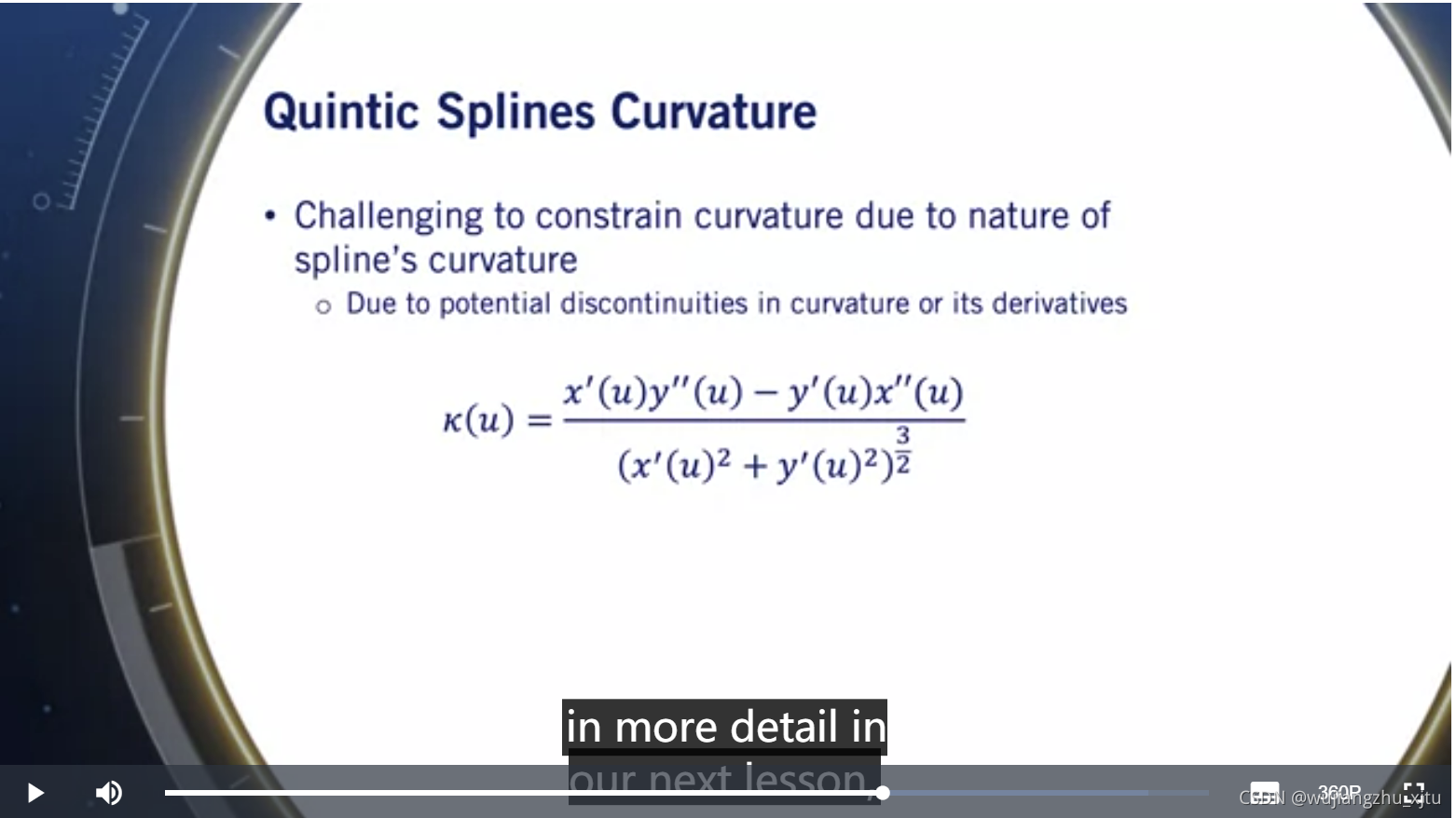
五次样条曲率计算
对于五次样条曲线,具有挑战性的是曲率约束,由于其具有潜在的曲率不连续性,分母可能为0及曲率导数可能为0不能1阶连续。曲率计算复杂,进行约束计算较困难。
三次螺旋线
螺旋线定义曲线曲率为弧长的函数,定义使得曲率约束检查变得简单,曲率可以通过简单在曲线上采样一些点进行约束即可获得良好的曲率性能,因为多项式特性。
k(s)为曲率方程
θ(s)可以理解为相对于起点增加的航向角delta heading。
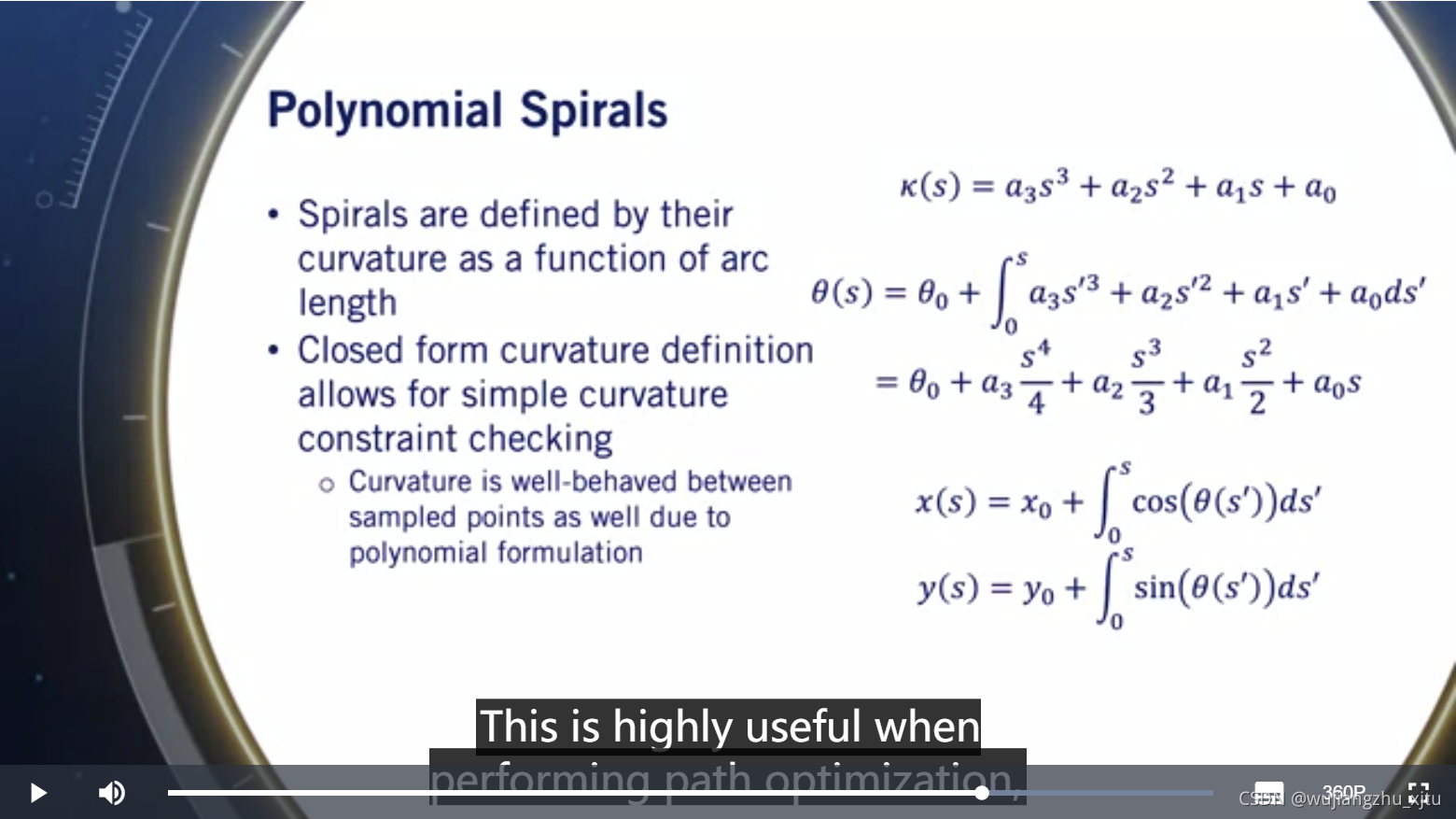
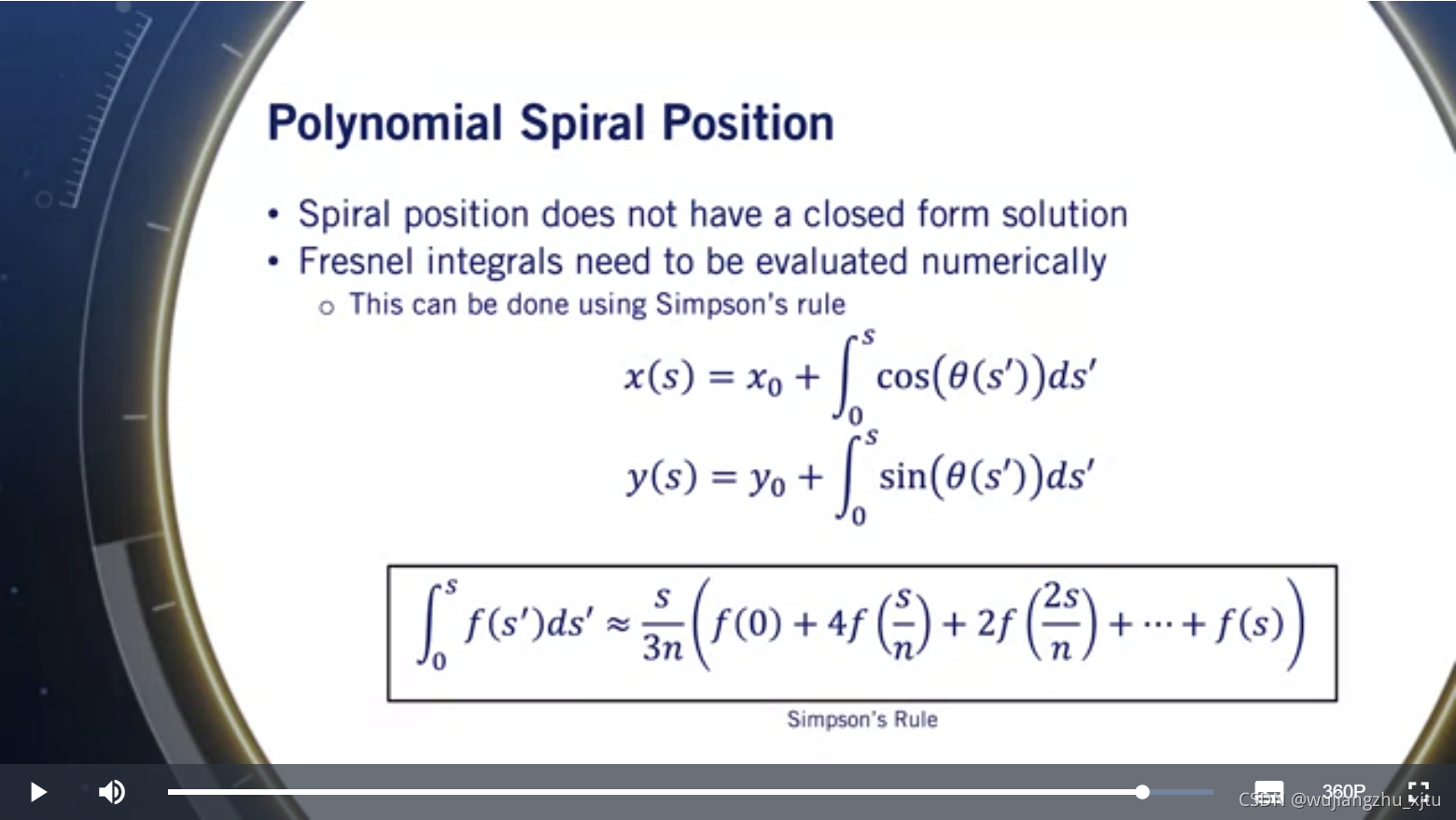
多项式螺旋线的x,y坐标计算
螺旋线位置没有一个严格的解析解,只能通过数值方法-辛普森法则来近似菲涅尔积分。
总结
讨论了路径规划问题里的边界条件和约束
介绍了参数曲线
讨论了路径规划中使用样条和螺旋线的差异




















 2470
2470

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











