






知乎参考: https://www.zhihu.com/question/54682285/answer/336365316
1. 机器人正运动学
1.1 机器人DH参数简介
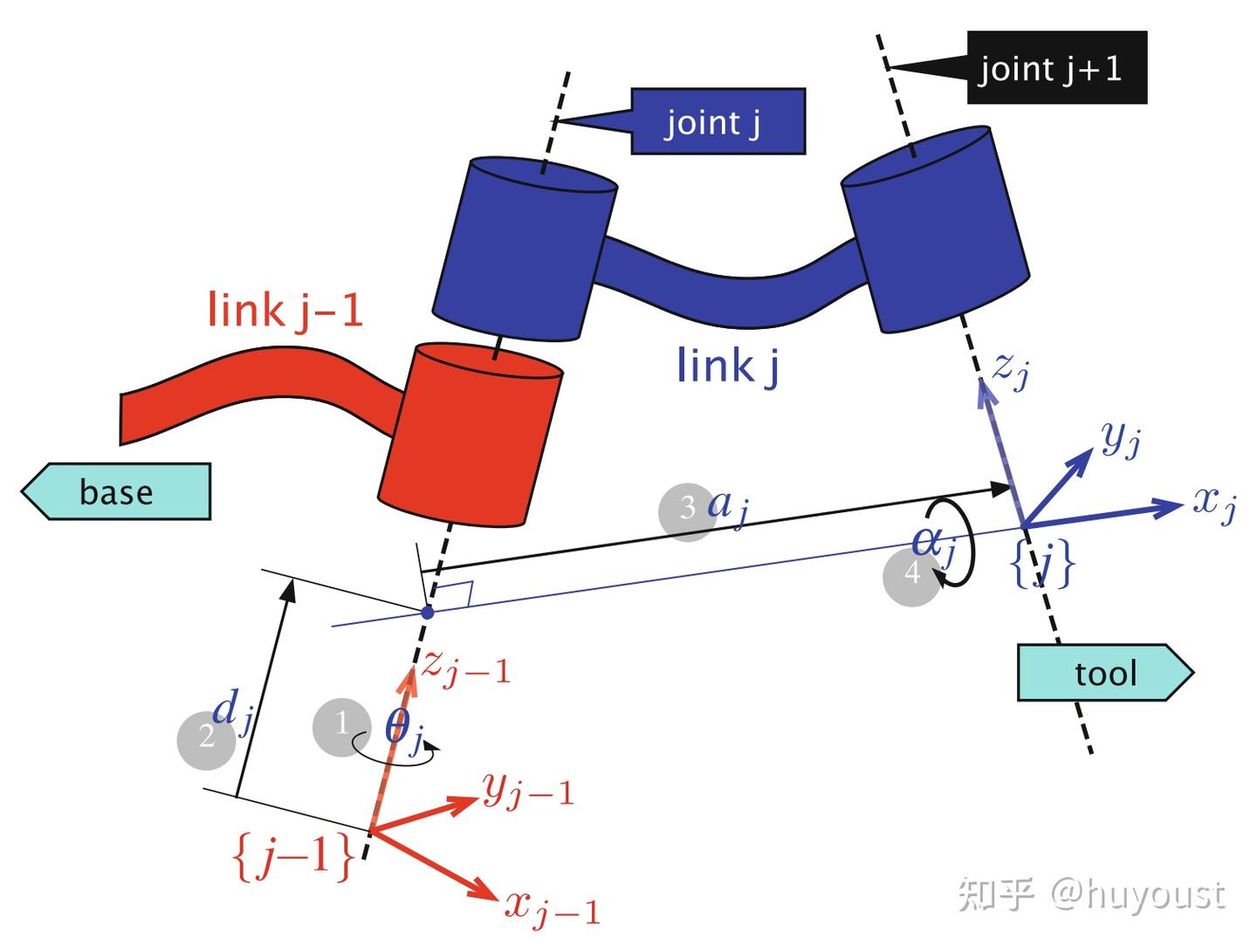
Denavit-Hartenberg(DH)参数是一种标准化方法,用于描述机器人各关节之间的几何关系。通过DH参数,可以将机器人关节的旋转和平移统一表示为矩阵变换。
DH参数包括以下四个变量:
a
i
a_i
ai:相邻关节轴之间的连杆长度。
d
i
d_i
di:沿关节轴的偏移量。
α
i
\alpha_i
αi:相邻关节轴之间的扭转角。
θ
i
\theta_i
θi:关节的旋转角度。
对于机器人,关节角度
θ
i
\theta_i
θi 通常由硬件编码器返回的值
q
i
q_i
qi 和关节零位偏置
θ
i
offset
\theta_i^{\text{offset}}
θioffset 组成:
θ
i
=
q
i
+
θ
i
offset
\theta_i = q_i + \theta_i^{\text{offset}}
θi=qi+θioffset
1.2 正运动学公式
通过DH参数和关节角度,可以计算机器人末端在基坐标系下的位姿矩阵: E B T = f ( q → , ϕ → ) {}_{E}^{B}\textrm{T} = f(\overrightarrow{q}, \overrightarrow{\phi}) EBT=f(q,ϕ)
其中:
q
→
\overrightarrow{q}
q:关节角度向量,由编码器返回的值组成。
ϕ
→
\overrightarrow{\phi}
ϕ:机器人运动学参数向量,包括所有的DH参数:
ϕ
→
=
(
a
0
,
d
0
,
α
1
,
θ
1
,
…
,
a
n
−
1
,
d
n
−
1
,
α
n
,
θ
n
)
T
\overrightarrow{\phi} = (a_0, d_0, \alpha_1, \theta_1, \dots, a_{n-1}, d_{n-1}, \alpha_n, \theta_n)^T
ϕ=(a0,d0,α1,θ1,…,an−1,dn−1,αn,θn)T
由于装配误差、加工误差等原因, ϕ → \overrightarrow{\phi} ϕ 中的参数可能存在偏差,因此需要通过标定来修正这些参数。
2. 机器人标定公式
2.1 标定目标
标定的目标是通过实验数据优化 ϕ → \overrightarrow{\phi} ϕ,使得机器人末端的实际位置与理论计算位置之间的误差最小。
2.2 标定方法
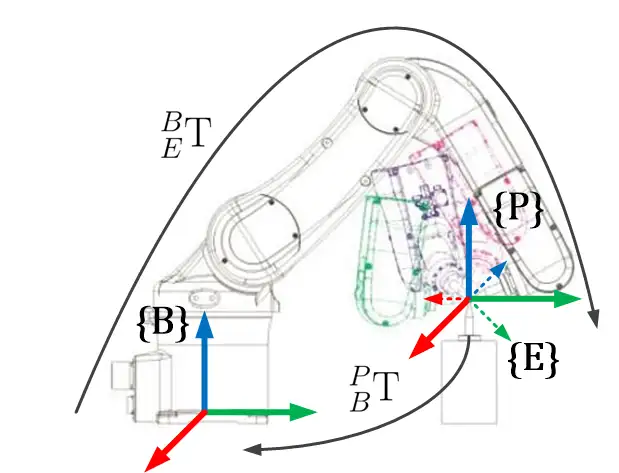
标定的核心思想是利用固定的针尖基准点 P P P,通过最小二乘法迭代优化 ϕ → \overrightarrow{\phi} ϕ。
2.2.1 数据采集
- 将机器人末端与针尖基准点 P P P 对齐。
- 选取若干个不同的关节角度配置 q → \overrightarrow{q} q,记录每个配置下的关节角度数据。
- 通过正运动学公式计算每个配置下的末端位姿 E B T {}^{\text{B}}_{\text{E}}T EBT。
2.2.2 误差定义
由于末端点始终与针尖基准点
P
P
P 接触,末端点在
P
P
P 坐标系下的位置应为
(
0
,
0
,
0
)
T
(0, 0, 0)^T
(0,0,0)T。因此,误差函数可以定义为:
Δ
E
P
p
→
=
[
0
0
0
]
−
E
P
p
→
\Delta_{E}^{P}\overrightarrow{p} = \begin{bmatrix} 0 \\ 0 \\ 0 \end{bmatrix} - {}_{E}^{P}\overrightarrow{p}
ΔEPp=
000
−EPp
其中:
E P p → {}_{E}^{P}\overrightarrow{p} EPp:末端点在 P P P 坐标系下的位置,由正运动学计算得到。
2.2.3 雅可比矩阵
误差函数 Δ E P p → \Delta_{E}^{P}\overrightarrow{p} ΔEPp 对运动学参数 ϕ → \overrightarrow{\phi} ϕ 的偏导数构成雅可比矩阵 J J J: J = [ ∂ f ∂ a 0 ∂ f ∂ d 0 ⋯ ∂ f ∂ θ n ] J = \begin{bmatrix} \frac{\partial f}{\partial a_0} & \frac{\partial f}{\partial d_0} & \cdots & \frac{\partial f}{\partial \theta_n} \end{bmatrix} J=[∂a0∂f∂d0∂f⋯∂θn∂f]
2.2.4 参数更新
通过最小二乘法,计算运动学参数的修正值
Δ
ϕ
→
\Delta\overrightarrow{\phi}
Δϕ:
Δ
ϕ
→
=
(
J
T
J
)
−
1
J
T
⋅
Δ
E
P
p
→
\Delta\overrightarrow{\phi} = (J^T J)^{-1} J^T \cdot \Delta_{E}^{P}\overrightarrow{p}
Δϕ=(JTJ)−1JT⋅ΔEPp
然后更新运动学参数:
ϕ
→
k
+
1
=
ϕ
→
k
+
Δ
ϕ
→
\overrightarrow{\phi}^{k+1} = \overrightarrow{\phi}^{k} + \Delta\overrightarrow{\phi}
ϕk+1=ϕk+Δϕ
2.2.5 迭代停止条件
重复上述步骤,直到 Δ ϕ → \Delta\overrightarrow{\phi} Δϕ 足够小,即: ∣ Δ ϕ → ∣ < ϵ |\Delta\overrightarrow{\phi}| < \epsilon ∣Δϕ∣<ϵ
其中 ϵ \epsilon ϵ 是预设的误差阈值。
3. 参考开源仓库
通过其他方法进行运动学参数标定.
-
https://github.com/PhilNad/robot-arm-kinematic-calibration
- 采用基于POE的机器人运动学校准方法,利用轴配置空间和伴随误差模型,基于扭转和正向运动学的指数积(POE)公式。通过迭代最小二乘优化方案,可以找到螺旋轴校正,从而最小化观测值与机器人正向运动学之间的误差。
-
https://github.com/neuebot/Kinematic-Calibration
- 一种基于圆拟合和对偶矢量几何的方法,用于确定串行机械手的经典Denavit-Hartenberg参数。
-
https://github.com/cursi36/Kalibrot?tab=readme-ov-file
- 采用Kalibrot(一种优化算法)解决寻找正确机器人运动学校准的最佳 DH 参数的问题。

















 6962
6962

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









