






灵巧手遇到故障有时需要我们进行拆卸,比如拇指的PST需要更换、肌腱线被夹住、断掉或者松脱,亦或指腹的电路板故障、接插件松脱等情况,这个时候您可以参考下文进行操作。本文主要讲解拇指的拆卸(其他手指的内部构造与拇指区别较大且操作复杂,后续另外再出一篇文章单独讲解)。
在进行拆卸操作前,请务必使机器处于掉电状态,最好事先调整灵巧手的位姿处于伸展状态。
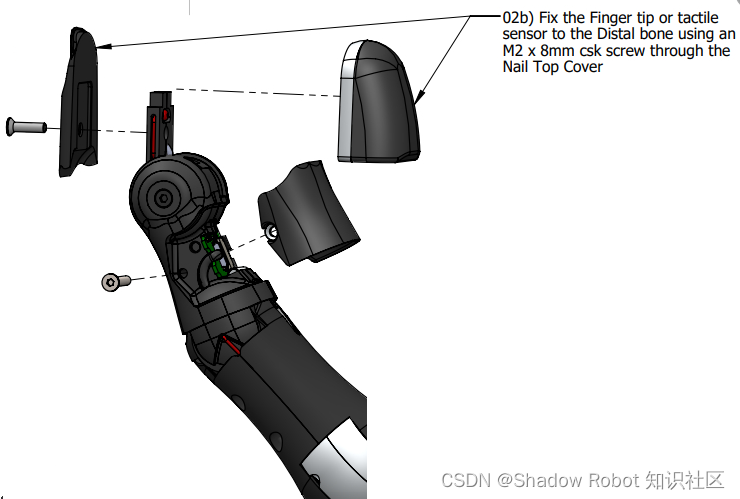
用内六角扳手把拇指上的几个M2螺丝全部卸下,如下图所示可以分别把指甲盖和软组织橡胶盖拆下。
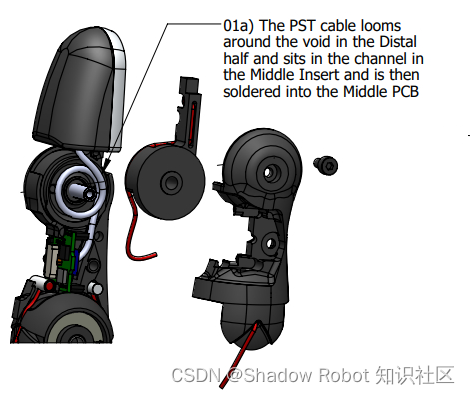
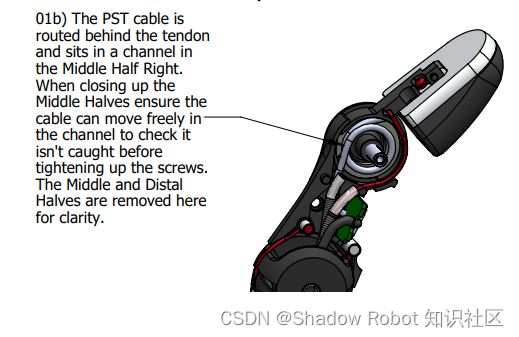
在软组织下面可以看到电路板、PST电路线缆、肌腱拉绳、两个肌腱线末端固定销。在下图所示的指腹盖板,拆卸时务必小心,因为内部机械结构可能保持了一定肌腱张力,如果零部件散落将很难还原。尽可能保持零部件不动的情况下拿下指腹侧盖板,拍照片记录好零部件的安装位置,以便后续还原。
如果肌腱绕线轴脱落并重新装回,请确保线轴安装的朝向及线轴绕线的方向正确,否则将无法正常控制。
正确安装后应重新对拇指进行标定,以保证拇指运动到正确的位置。
PST传感器(左手大拇指)实物图:



















 3723
3723

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









