







加速度计和陀螺仪的简介
https://www.cnblogs.com/zdxgloomy/articles/4171937.html
加速度计和陀螺仪的使用指南 ,代码部分
https://www.amobbs.com/forum.php?mod=viewthread&tid=5510930&_dsign=972b156c
模拟加速度计:
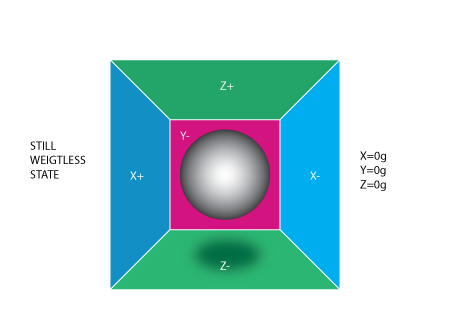
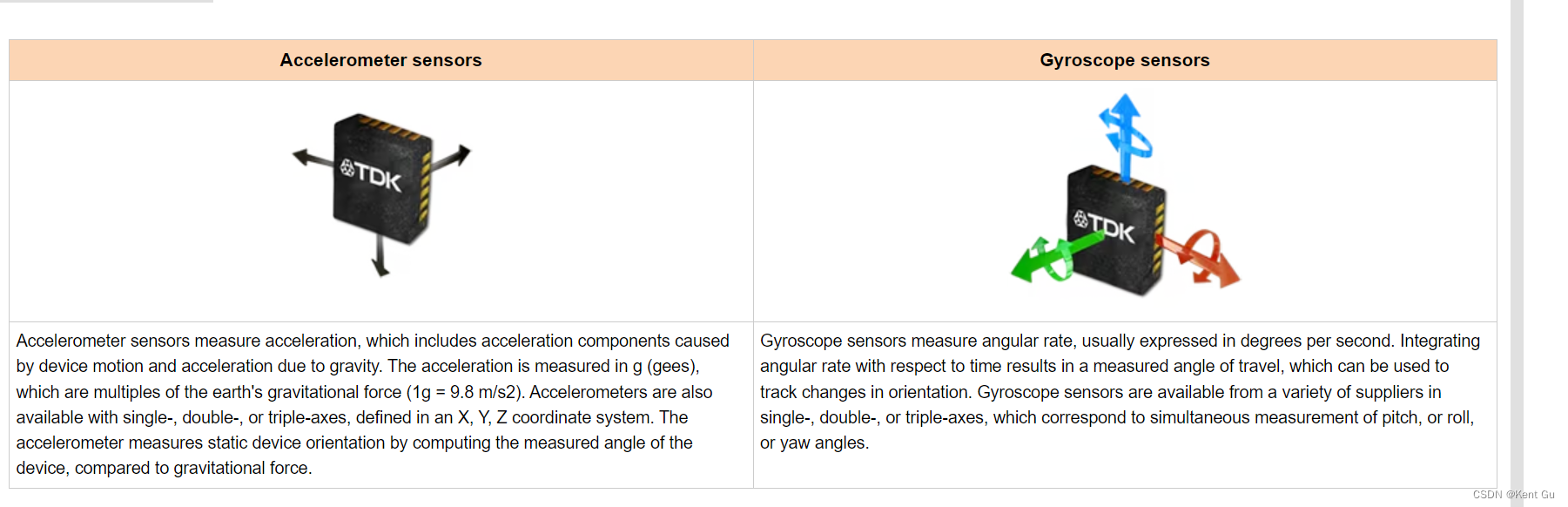
1. Accelerometer prinicple.

加速度传感器是一标准质量球,用电容的方法得到质量球的位置;
加速度计的本质是检测力而非加速度。只是加速度所引起的惯性力正好能被加速度计的检测装置所捕获。
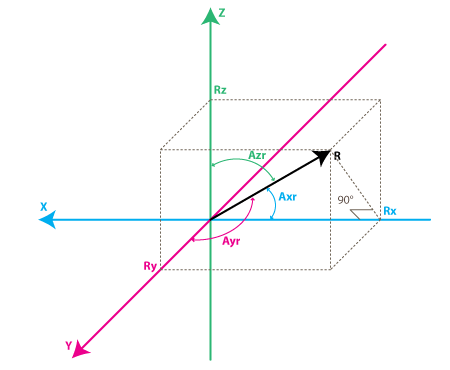
Acc是测试静态加速度,相当于测试X,Y,Z 三个方向的重量。 假设一个球是1G,那么三个方向的重量加速度的平方和是1.
SQRT(cosX ^ 2 + COSY ^ 2 + cosZ ^ 2)= 1
2. Gyro sensor principle

陀螺仪的每个通道检测一个轴的旋转。例如,一个2轴陀螺仪检测绕X和Y轴的旋转
- Gryo & Accele difference
3.1 Gyro是测试动态的加速度,角度变化率

















 895
895

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









