






目录
0. 概述
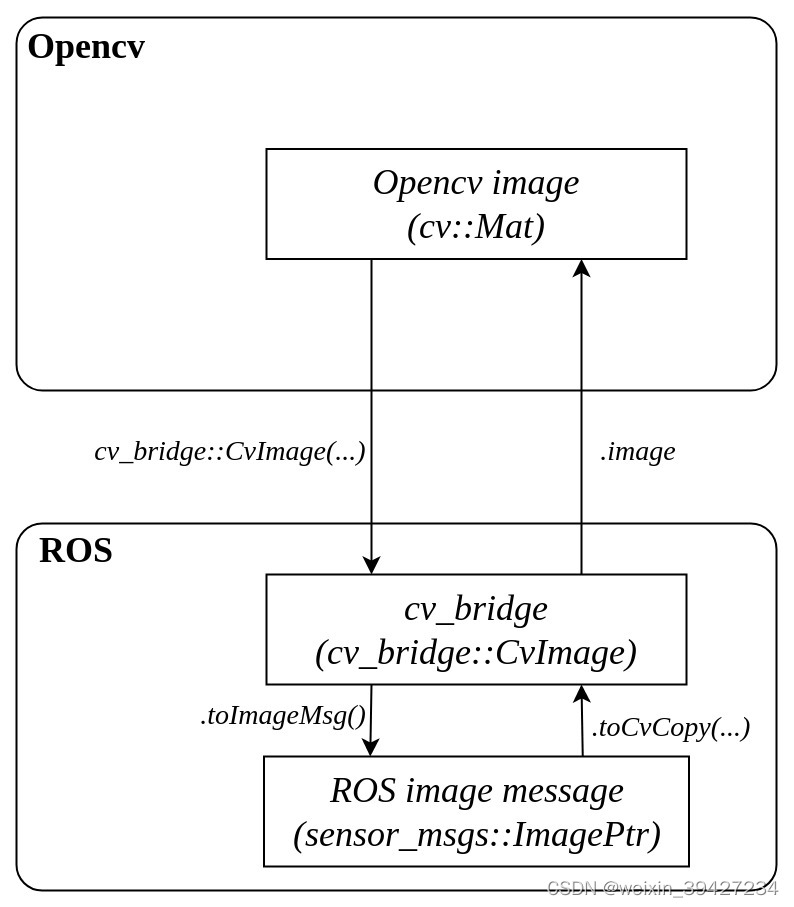
Opencv以其丰富的图像处理算法广泛应用于图像处理中,而Opencv主要使用cv::Mat封装图像数据,该数据是无法直接在ROS中传输的,需要对其进行编码成ROS可传输的sensor_msgs::Image格式;cv_bridge的主要作用便是实现该转换过程。通过cv_bridge的api可以很方便的将Opencv的cv::Mat转换为cv_bridge的数据格式CvImage,然后调用自己的成员函数toImageMsg()将CvImage转换为sensor_msgs::Image。
cv_bridge是ROS图像消息和Opencv图像数据转换的一个功能包,就像该功能包的名字一样,cv_bridge在Opencv和ROS联合编程中起到桥梁的作用。
1. 相关api源码声明&使用
1.1 Opencv图像转ROS图像消息
在CvImage类中执行的OpenCV图像转换为ROS消息的成员函数为 toImageMsg(),其源码声明为:
/**
* \brief Image message class that is interoperable with sensor_msgs/Image but uses a
* more convenient cv::Mat representation for the image data.
*/
class CvImage
{
public:
std_msgs::Header header; //!< ROS header
std::string encoding; //!< Image encoding ("mono8", "bgr8", etc.)
cv::Mat image; //!< Image data for use with OpenCV
/**
* \brief Empty constructor.
*/
CvImage() {}
/**
* \brief Constructor.
*/
CvImage(const std_msgs::Header& header, const std::string& encoding,
const cv::Mat& image = cv::Mat())
: header(header), encoding(encoding), image(image)
{
}
/**
* \brief Convert this message to a ROS sensor_msgs::Image message.
*
* The returned sensor_msgs::Image message contains a copy of the image data.
*/
sensor_msgs::ImagePtr toImageMsg() const;
/**
* dst_format is compress the image to desire format.
* Default value is empty string that will convert to jpg format.
* can be: jpg, jp2, bmp, png, tif at the moment
* support this format from opencv:
* http://docs.opencv.org/modules/highgui/doc/reading_and_writing_images_and_video.html#Mat imread(const string& filename, int flags)
*/
sensor_msgs::CompressedImagePtr toCompressedImageMsg(const Format dst_format = JPG) const;
/**
* \brief Copy the message data to a ROS sensor_msgs::Image message.
*
* This overload is intended mainly for aggregate messages such as stereo_msgs::DisparityImage,
* which contains a sensor_msgs::Image as a data member.
*/
void toImageMsg(sensor_msgs::Image& ros_image) const;
/**
* dst_format is compress the image to desire format.
* Default value is empty string that will convert to jpg format.
* can be: jpg, jp2, bmp, png, tif at the moment
* support this format from opencv:
* http://docs.opencv.org/modules/highgui/doc/reading_and_writing_images_and_video.html#Mat imread(const string& filename, int flags)
*/
void toCompressedImageMsg(sensor_msgs::CompressedImage& ros_image, const Format dst_format = JPG) const;
typedef boost::shared_ptr<CvImage> Ptr;
typedef boost::shared_ptr<CvImage const> ConstPtr;
protected:
boost::shared_ptr<void const> tracked_object_; // for sharing ownership
/// @cond DOXYGEN_IGNORE
friend
CvImageConstPtr toCvShare(const sensor_msgs::Image& source,
const boost::shared_ptr<void const>& tracked_object,
const std::string& encoding);
/// @endcond
};Opencv cv::Mat转ROS的sensor_msgs::ImagePtr用到的主要是cv_bridge::CvImage的toImageMsg()成员函数,具体转换过程如下所示:
cv::Mat image;
sensor_msgs::ImagePtr msg = cv_bridge::CvImage(std_msgs::Header(), "bgr8", image).toImageMsg();1.2 ROS图像消息转Opencv图像
ROS的sensor_msgs::ImageConstPtr转Opencv的cv::Mat用的主要api包括toCvCopy()和toCvShare(),具体声明如下所示:
/**
* \brief Convert a sensor_msgs::Image message to an OpenCV-compatible CvImage, copying the
* image data.
*
* \param source A shared_ptr to a sensor_msgs::Image message
* \param encoding The desired encoding of the image data, one of the following strings:
* - \c "mono8"
* - \c "bgr8"
* - \c "bgra8"
* - \c "rgb8"
* - \c "rgba8"
* - \c "mono16"
*
* If \a encoding is the empty string (the default), the returned CvImage has the same encoding
* as \a source.
*/
CvImagePtr toCvCopy(const sensor_msgs::ImageConstPtr& source,
const std::string& encoding = std::string());
/**
* \brief Convert a sensor_msgs::Image message to an OpenCV-compatible CvImage, copying the
* image data.
*
* \param source A sensor_msgs::Image message
* \param encoding The desired encoding of the image data, one of the following strings:
* - \c "mono8"
* - \c "bgr8"
* - \c "bgra8"
* - \c "rgb8"
* - \c "rgba8"
* - \c "mono16"
*
* If \a encoding is the empty string (the default), the returned CvImage has the same encoding
* as \a source.
* If the source is 8bit and the encoding 16 or vice-versa, a scaling is applied (65535/255 and
* 255/65535 respectively). Otherwise, no scaling is applied and the rules from the convertTo OpenCV
* function are applied (capping): http://docs.opencv.org/modules/core/doc/basic_structures.html#mat-convertto
*/
CvImagePtr toCvCopy(const sensor_msgs::Image& source,
const std::string& encoding = std::string());
/**
* \brief Convert an immutable sensor_msgs::Image message to an OpenCV-compatible CvImage, sharing
* the image data if possible.
*
* If the source encoding and desired encoding are the same, the returned CvImage will share
* the image data with \a source without copying it. The returned CvImage cannot be modified, as that
* could modify the \a source data.
*
* \param source A shared_ptr to a sensor_msgs::Image message
* \param encoding The desired encoding of the image data, one of the following strings:
* - \c "mono8"
* - \c "bgr8"
* - \c "bgra8"
* - \c "rgb8"
* - \c "rgba8"
* - \c "mono16"
*
* If \a encoding is the empty string (the default), the returned CvImage has the same encoding
* as \a source.
*/
CvImageConstPtr toCvShare(const sensor_msgs::ImageConstPtr& source,
const std::string& encoding = std::string());
/**
* \brief Convert an immutable sensor_msgs::Image message to an OpenCV-compatible CvImage, sharing
* the image data if possible.
*
* If the source encoding and desired encoding are the same, the returned CvImage will share
* the image data with \a source without copying it. The returned CvImage cannot be modified, as that
* could modify the \a source data.
*
* This overload is useful when you have a shared_ptr to a message that contains a
* sensor_msgs::Image, and wish to share ownership with the containing message.
*
* \param source The sensor_msgs::Image message
* \param tracked_object A shared_ptr to an object owning the sensor_msgs::Image
* \param encoding The desired encoding of the image data, one of the following strings:
* - \c "mono8"
* - \c "bgr8"
* - \c "bgra8"
* - \c "rgb8"
* - \c "rgba8"
* - \c "mono16"
*
* If \a encoding is the empty string (the default), the returned CvImage has the same encoding
* as \a source.
*/
CvImageConstPtr toCvShare(const sensor_msgs::Image& source,
const boost::shared_ptr<void const>& tracked_object,
const std::string& encoding = std::string());具体有如下使用方法:
// sensor_msgs::ImageConstPtr To cv::Mat
sensor_msgs::ImageConstPtr msg;
cv_bridge::CvImagePtr cv_ptr;
try
{
cv_ptr = cv_bridge::toCvCopy(msg, sensor_msgs::image_encodings::BGR8);
}
catch(cv_bridge::Exception &e)
{
ROS_ERROR("cv_bridge exception %s", e.what());
}2. 实践
实践内容为使用ROS编写两个节点,发送者节点和接收者节点,发送者节点负责通过Opencv读取摄像头数据并将读取到的图像数据使用cv_bridge转换为可以在ROS节点间传输的图像数据;接收者节点订阅发布者节点的图像的数据并将ROS图像数据格式通过cv_bridge转换为Opencv的cv::Mat可视化。

cv_bridge编程实践
2.1 创建ROS工作空间
mkdir -p cv_bridge_test/src2.2 创建图像发送节点和接收节点
cd v_bridge_test/src
catkin_create_pkg camera_pub roscpp rospy std_msgs sensor_msgs cv_bridge image_transport
catkin_create_pkg camera_sub roscpp rospy std_msgs sensor_msgs cv_bridge image_transport2.3 实现图像的发送节点
// v_bridge_test/src/camera_pub/src/camera_pub.cpp
#include<iostream>
#include<ros/ros.h>
#include<opencv2/opencv.hpp>
#include<image_transport/image_transport.h>
#include<cv_bridge/cv_bridge.h>
class CameraDriver
{
public:
CameraDriver():
it(nh_),
capture_(0)
{
image_pub_ = it_.advertise("/image_raw", 10);
this->start_capture();
}
~CameraDriver(){}
void start_capture()
{
if(!capture_.isOpened())
{
ROS_ERROR("fail to open camera");
ros::shutdown();
return;
}
while(true)
{
cv::Mat image;
capture_>>image;
if(image.empty())
{
ROS_ERROR("NULL image");
continue;
}
sensor_msgs::ImagePtr msg = cv_bridge::CvImage(std_msgs::Header(), "bgr8", image).toImageMsg();
image_pub_.publish(std::move(msg));
cv::waitKey(3);
}
}
private:
cv::VideoCapture capture_;
ros::NodeHandle nh_;
image_transport::ImageTransport it_;
image_transport::Publisher image_pub_;
};
int main(int argc, char* argv[])
{
ros::init(argc, argv, "CameraSource");
CameraDriver cd;
ros::spin();
return 0;
}修改CMakeLists.txt
# v_bridge_test/src/camera_pub/CMakeLists.txt
cmake_minimum_required(VERSION 3.0.2)
project(camera_pub)
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
cv_bridge
image_transport
)
# Opencv
find_package(OpenCV REQUIRED)
message(STATUS "opencv version ${OpenCV_VERSION}")
catkin_package(CATKIN_DEPENDS
cv_bridge
image_transport
)
include_directories(
${catkin_INCLUDE_DIRS}
)
add_executable(${PROJECT_NAME}_node src/camera_pub.cpp)
target_link_libraries(${PROJECT_NAME}_node
${catkin_LIBRARIES}
${OpenCV_LIBRARIES}
)实现一个launch文件用以启动节点
<!--cv_bridge_test/src/camera_pub/launch/camera_pub.launch-->
<launch>
<node pkg="camera_pub" type="camera_pub_node" name="camera_pub_node">
</node>
</launch>2.4 实现图像的接收节点
// cv_bridge_test/src/camera_sub/camera_sub.cpp
#include<iostream>
#include<ros/ros.h>
#include<opencv2/opencv.hpp>
#include<cv_bridge/cv_bridge.h>
#include<image_transport/image_transport.h>
static const std::string CV_WINDOW = "camera_player";
class CameraListener
{
public:
CameraListener():
it_(nh_)
{
image_sub_ = it_.subcribe("/image_raw", 1, &CameraListener::imageCb, this);
cv::namedWindow(CV_WINDOW);
}
~CameraListener()
{
cv::destroyWindow(CV_WINDOW);
}
void imageCb(const sensor_msgs::ImageConstPtr& msg)
{
cv_bridge::CvImagePtr cv_ptr;
try
{
cv_ptr = cv_bridge::toCvCopy(msg, std_msgs::image_encodings::BGR8);
}
catch(cv_bridge::Exception &e)
{
ROS_ERROR("cv_bridge exception %s", e.what());
return;
}
cv::imshow(CV_WINDOW, cv_ptr->image);
cv::waitKey(3);
}
private:
ros::NodeHandle nh_;
image_transport::ImageTransport it_;
image_transport::Subscriber image_sub_;
};修改CMakeLists.txt
# cv_bridge_test/src/camera_pub/CMakelists.txt
cmake_minimum_required(VERSION 3.0.2)
project(camera_sub)
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
cv_bridge
image_transport
)
find_package(OpenCV REQUIRED)
message(STATUS "Opencv version ${OpenCV_VERSION}")
catkin_package(CATKIN_DEPENDS
cv_bridge
image_transport
)
include_directories(
${catkin_INCLUDE_DIRS}
)
add_executable(${PROJECT_NAME}_node src/camera_sub.cpp)
target_link_libraries(${PROJECT_NAME}_node
${catkin_LIBRARIES}
${OpenCV_LIBRARIES}
)实现一个launch文件用以启动节点
<!--cv_bridge_test/src/camera_pub/launch/camera_sub.launch-->
<launch>
<node pkg="camera_sub" type="camera_sub_node" name="camera_sub_node">
</node>
</launch>













 3086
3086











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









