






 本文介绍了在严苛环境中使用的旋变变压器和RDC(旋转/直接数字转换器)在角度传感器中的应用,重点讲解了它们的工作原理、在汽车和航空航天领域的应用,以及R/D转换器如何通过比较和反馈机制将模拟角度转换为数字角度的过程,同时提到了带宽设置对性能的影响。
本文介绍了在严苛环境中使用的旋变变压器和RDC(旋转/直接数字转换器)在角度传感器中的应用,重点讲解了它们的工作原理、在汽车和航空航天领域的应用,以及R/D转换器如何通过比较和反馈机制将模拟角度转换为数字角度的过程,同时提到了带宽设置对性能的影响。
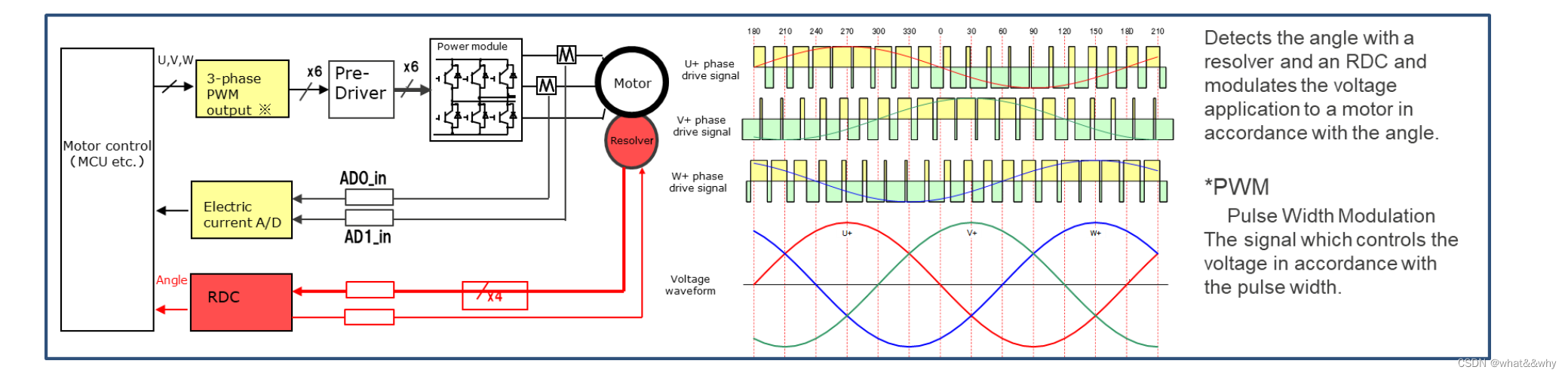
方式是利用旋变变压器和RDC检测角度。
方案介绍
使用环境:当角度传感器需要在恶劣的环境条件下工作时,需要使用解析器。主要用途:用于汽车、航空航天、工厂等恶劣环境的角度检测。
在汽车领域,变压器也用于安装在高压和电动汽车发动机上的控制电机。
图显示了使用解析器和R/D转换器控制无刷直流电机的示例。
旋转变压器的工作原理
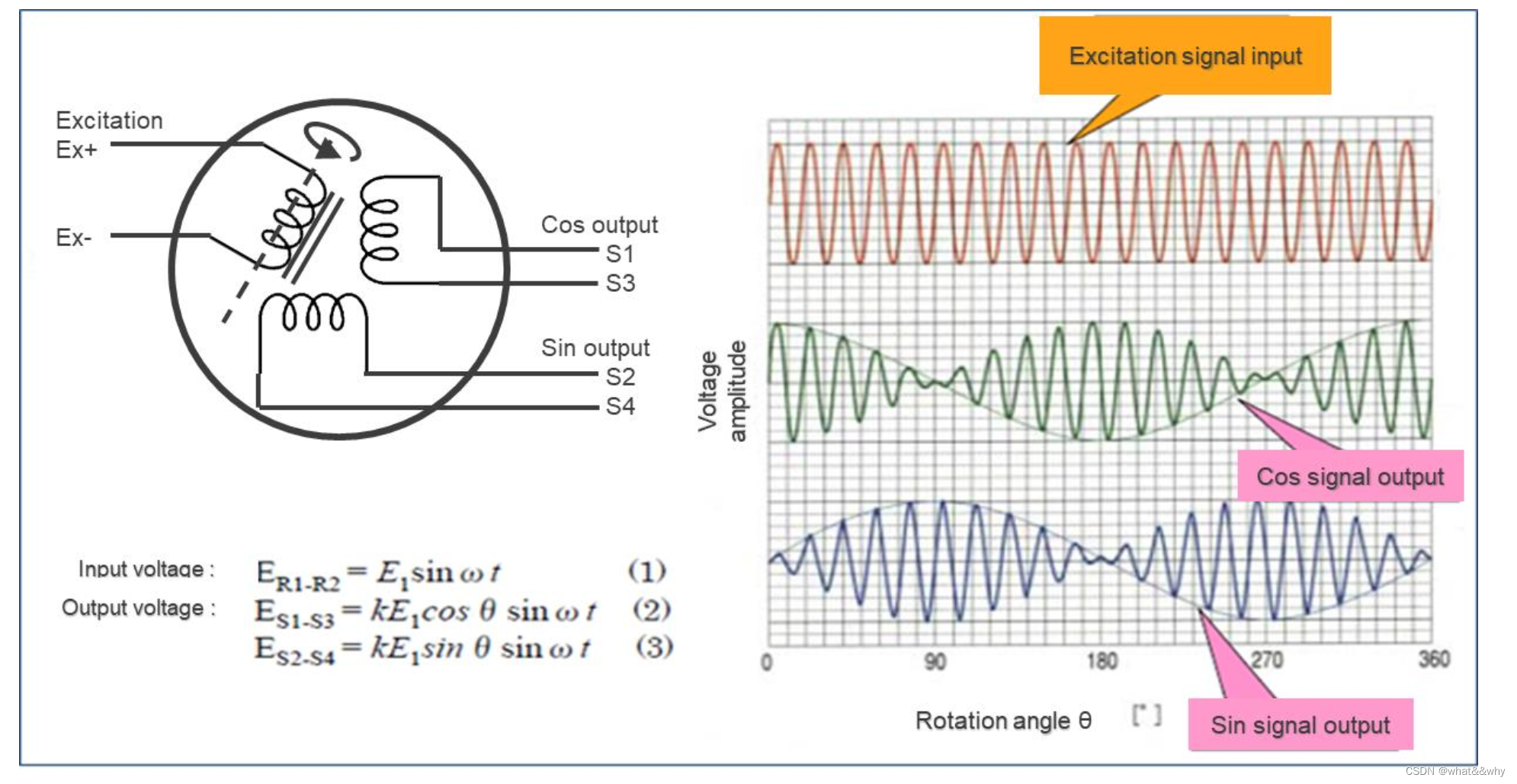
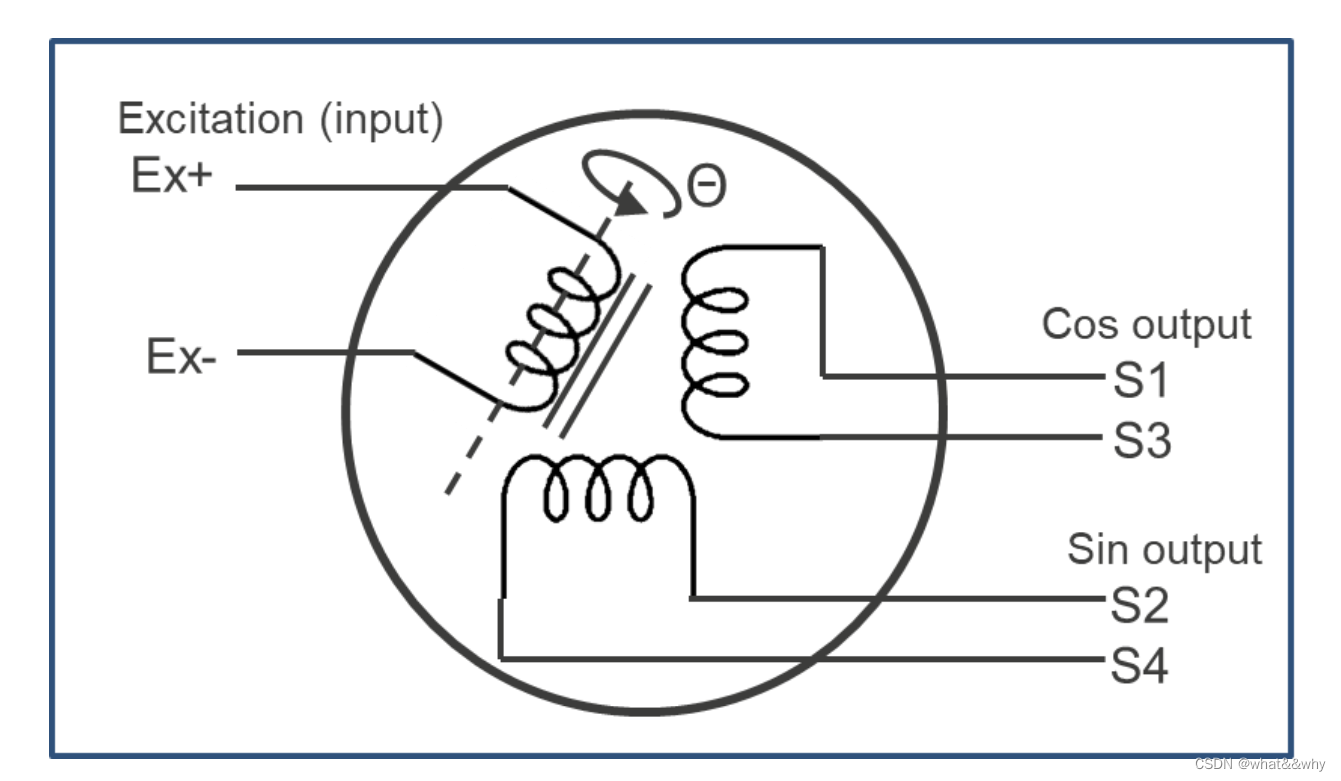 旋转器是用来检测转轴角度的传感器;上图可见。它是一个模拟装置,具有2个激励信号输入引脚(Ex+, Ex-)和4个角度信号输出引脚(S3 S1, S2, S4)。通过将交流信号输入励磁信号输入引脚,右手螺旋定则;产生旋转力;信号包括角度;可以从角度信号输出引脚获得信息。从角度信号输出引脚输出的信号用an转换为数字角度(解析器角度:θ);R / D转换器。S1-S3、S2-S4和Ex+-Ex-之间的连接是绕组。
旋转器是用来检测转轴角度的传感器;上图可见。它是一个模拟装置,具有2个激励信号输入引脚(Ex+, Ex-)和4个角度信号输出引脚(S3 S1, S2, S4)。通过将交流信号输入励磁信号输入引脚,右手螺旋定则;产生旋转力;信号包括角度;可以从角度信号输出引脚获得信息。从角度信号输出引脚输出的信号用an转换为数字角度(解析器角度:θ);R / D转换器。S1-S3、S2-S4和Ex+-Ex-之间的连接是绕组。
解析器作为可变耦合变压器工作,它改变磁耦合的数量在一次绕组(励磁)和2次绕组(Cos输出、Sin输出)之间按转轴的角度。
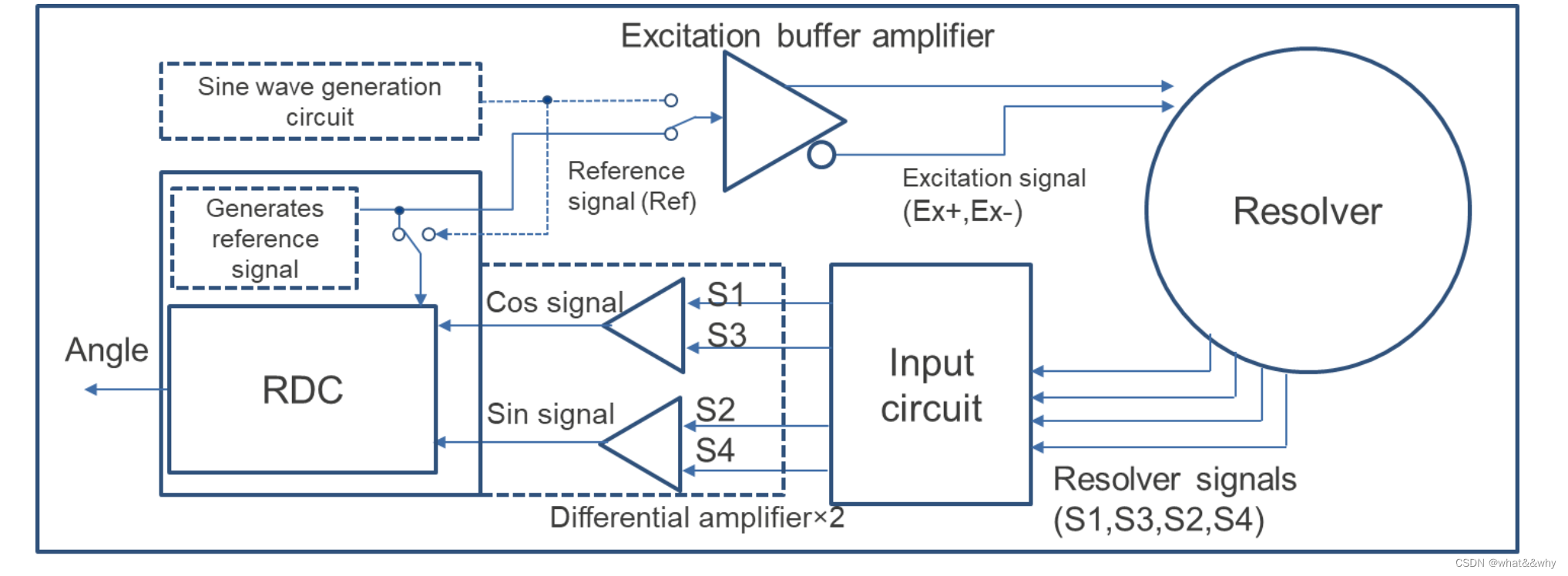
 从解析器获得角度所需的连接如图下图所示;解析器接收从参考信号产生电路输出的激励信号
从解析器获得角度所需的连接如图下图所示;解析器接收从参考信号产生电路输出的激励信号
一个R/D转换器或正弦波产生电路,并且R/D转换器接收。一般来说,差分放大器接收输出时要考虑噪声抗扰性。有时候差分放大器集成在R/D转换器中。当一个R/D转换器没有任何参考时
信号产生函数,参考信号输入到R/D转换器和激励缓冲器外部放大器。
下面是一个转换得原理介绍图
角度转换的概念介绍
一个R/D转换器利用解析器输出信号(Cos信号和Sin信号)检测解析器角度参考信号,以及具有角度反馈的跟踪回路。图显示了原理图R/D转换器图。
解析器输出信号与前一个输出角之间的差值计算为a偏差。输出角度的增加或减少是由偏差的符号决定的。当输出角正确时(输入角θ =输出角Φ),偏差ε为0。
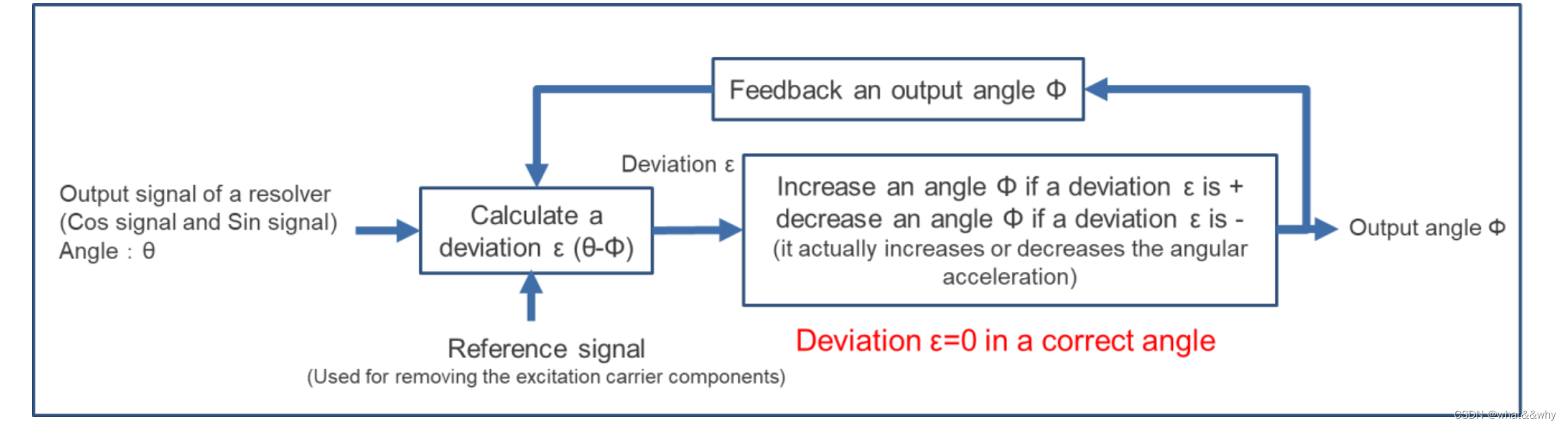
原理就是比较差值获取当前角度;可以理解为反馈去比较计算;获取角度值。
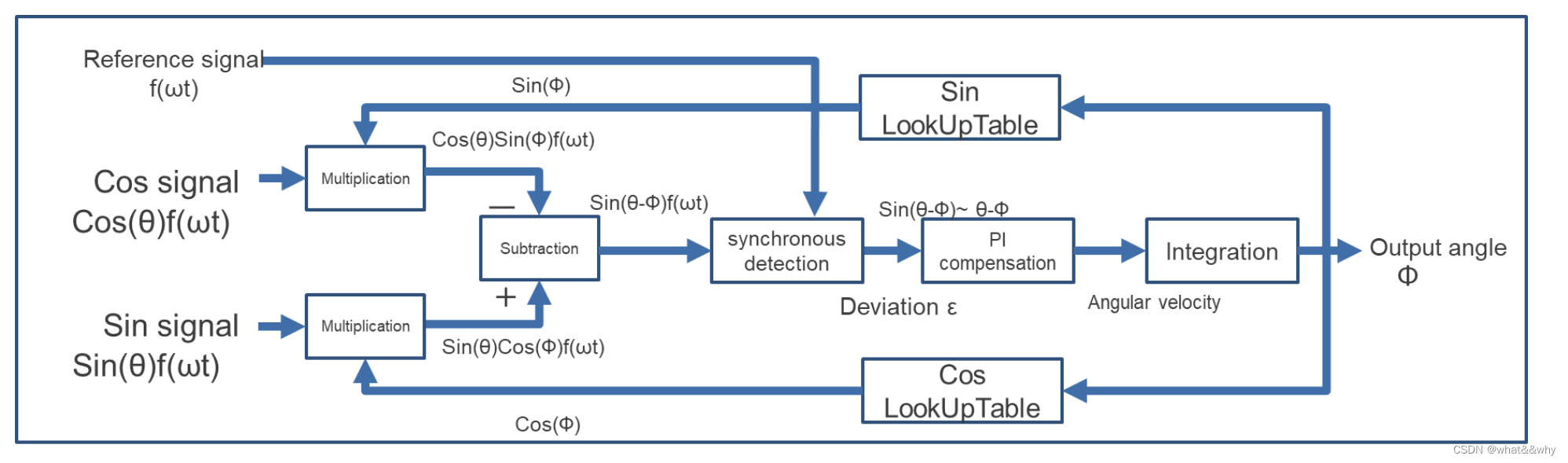
R/D转换器使用以下原理计算角度。
在查找表中乘以Cos信号和Sin表Cos(θ) ωt ω Sin(Φ) -(1);
在查找表中乘以Sin信号和Cos表Sin(θ) ωt ω Cos(Φ) -(2);
计算(2)-(1)
(Sin(θ)・f(ωt)・Cos(Φ))——(Cos(θ)・f(ωt)・Sin(Φ));
= ((Sin(θ)・Cos(Φ))-(Cos(θ)・Sin(Φ)))・f(ωt))
Since (Sin(θ)・Cos(Φ))-(Cos(θ)・Sin(Φ))=Sin(θ-Φ)
= Sin(θ-Φ)f(ωt) ~ (θ-Φ)f(ωt) -(3)
通过使用输入f(ωt)消除同步检测中的f(ωt)
(θ-Φ)・f(ωt)→θ-Φ = ε -(4)
ε 是控制回路中的控制偏差。负反馈控制提供反馈,使控制偏差变为0。当θ = Φ时,来自解析器的模拟角度信息已被转换到数字角度Φ。在环路中设置PI补偿器的响应速度。
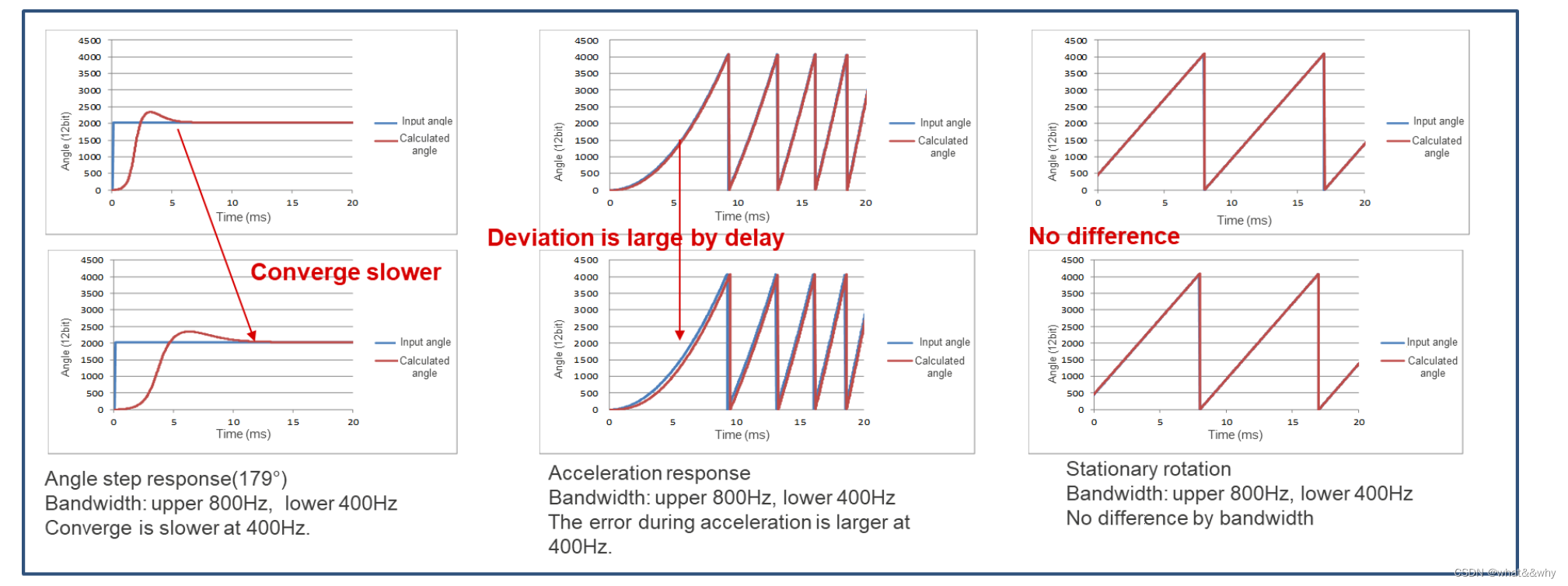
当使用R/D转换器时,需要设置PI补偿器的带宽。带宽为频率表示。当设置更高的频率时,响应将更快但更容易受噪音等其他因素影响。另一方面,当设置较低的频率时,响应会变慢,但对噪声有更高的抗扰度,R/D转换器输出变得更稳定。为安装在瑞萨MCU上的R/D转换器,默认为800Hz,但可以更改。
一些R/D转换器具有自动设置带宽的功能。使用此函数时,当解析器稳定时,带宽设置为低,当快速响应时,带宽自动设置为高需要的,比如在加速时。安装在瑞萨单片机上的R/D转换器具有自动调节功能函数。
R/D转换器的带宽设置对加速度和角阶跃的响应速度有影响但对旋转静止时的最大速度没有影响。例如,当带宽设置低(约200Hz),如果一个解析器被缓慢加速,它甚至可以被跟踪到最后
转速高(例如1000Hz=60000rpm)。同样,当解析器高速静止旋转时,R/D转换器内部保持平稳(ε很小),并且在自动调节中设置低带宽。

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









