






【创作背景】
针对多个车型机器人,对多个区域进行联合探索建图,且需要对各机器人创建的二维概率地图进行正确合并,形成一个大地图进行保存的使用情形。
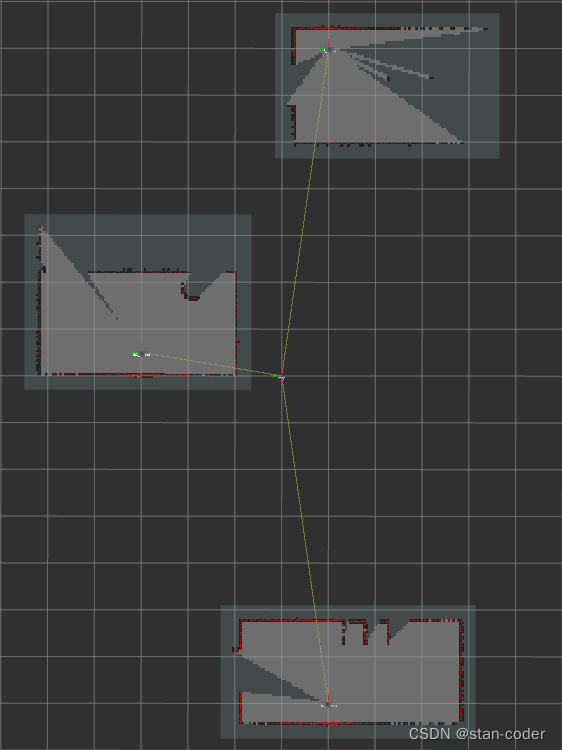
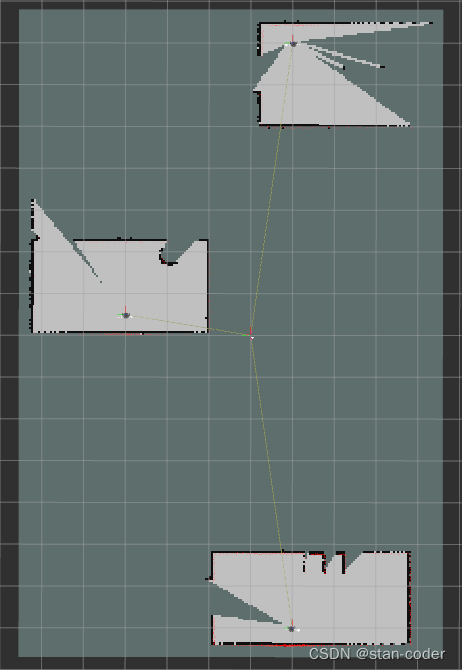
【效果一览】
-
各车子地图
-
融合大地图
【工程技术栈】
- ROS Navigation OccupancyGrid
- OpenCV
【实现思路】
1、ROS导航包使用的二维概率地图都是有分辨率的,也就是地图 yaml 文件里写的 resolution;换句话说,这个就是地图像素对应的真实长度,比如“ resolution: 0.05 “,意思就是map图像中每个像素点对应真实世界中 5 厘米的长度;同理,yaml文件里还有一个 “origin: [-8.000000, -12.200000, 0.000000]”,其实这个表示的就是map图像中建图起点所代表的真实世界坐标,换言之,我们通过分辨率和原点坐标,就可以推算出各车map图像之间的相对关系
2、那么如何把 nav_msg/OccupancyGrid 消息转换成一个opencv的 Mat 呢?我们知道,ros map有几种模式,其中导航包使用的是三元值模式,也就是说OccupancyGrid的data区,只有-1,0,100三种可能,所以我们需要使用一个signed char的Mat容器来放map图像
cv::Mat img = cv::Mat( grids.info.height, grids.info.width, CV_8SC1,
const_cast<signed char*>(grids.data.data()) );3、如果你很细心,你会发现,这样转换得到的图像 mat 和 rviz 中看到的map不太一样!没错,这是因为 OccupancyGrid 消息存放 data 的顺序不是如 mat 那样,从左到右,从上到下;而是以左下角为原点,且右为x轴正向,上为y轴正向;所以这里需要把 mat 进行翻面和旋转,方能得到正确的图像
4、接下来就是根据每个子图的尺寸和锚点,确定大地图画板的大小了,并且把每个子图 copyto 到画板指定的 rect 区域即可
5、最后把融合后的 map 图像转换成 OccupancyGrid 消息发布出来即可,这里要注意OccupancyGrid 消息的 data 遍历方式。
【待完善功能】
1、目前的地图融合版本只支持起始建图相同朝向的小车,且需要比较精确的小车间相对位置关系
2、各地图叠加的时候,使用的是粗暴的取像素max值,而 ROS 导航概率地图非常坑的一点的是,100表示的是准障碍物,这就意味着 子图 交叠区域的地方,很可能出现错误的 黑色像素(黑色表示障碍物),但这一点目前没有想到比较好的解决办法,因为每个车的建图都是独立的,我们对他们的信任程度也是一样的,无法判断谁的地图更准确,从而去优化地图融合
3、现在缺少一种更智能的寻找地图相对转换关系的方式,有人用 传统图像匹配 寻找转换矩阵,但是我看了效果不好,估计还得上深度学习的方法















 3989
3989











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









