







 本文深入解析ABB机器人运动指令中的MoveJ,包括运动指令分类、MoveJ指令的使用及其在空间大范围移动的应用。同时,介绍了程序调试菜单及操作步骤,帮助学习者掌握ABB机器人编程与调试技巧。
本文深入解析ABB机器人运动指令中的MoveJ,包括运动指令分类、MoveJ指令的使用及其在空间大范围移动的应用。同时,介绍了程序调试菜单及操作步骤,帮助学习者掌握ABB机器人编程与调试技巧。
本节要点
ABB机器人知识点
· 了解运动指令分类
· 掌握MoveJ 指令的使用
· 掌握程序调试常用操作
要点解析
MoveJ运动指令
01.运动指令分类
ABB 机器人运动指令分为4种,分别为:关节运动 MoveJ、直线运动 MoveL、圆弧运动 MoveC 和绝对位置运动 MoveAbsJ。
02.MoveJ 指令
机器人以最快捷的方式运动至目标点,其运动状态不完全可控,但运动路径保持唯一。MoveJ 指令常用于机器人在空间大范围移动,如下图所示。MoveJ 指令示例如下图所示。
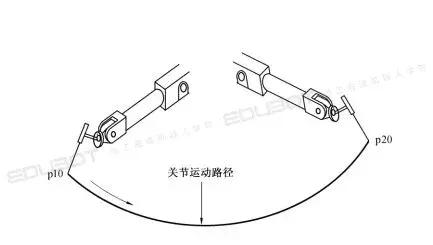
关节运动路径

 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 4728
4728

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









