







摘要:使用小熊派开发板,通过硬件IIC与MPU6050六轴传感器模块通信,完成相应寄存器配置,成功获取陀螺仪、加速度计数据。
本文主要讲述使用小熊派开发板+MPU6050六轴传感器,获取加速度计以及陀螺仪信息。
一、实验准备
1.实验环境
- 一块stm32开发板(推荐使用小熊派),以及数据线
- 已经安装STM32CubeMX
- 已经安装KeilMDK,并导入stm32开发板对应的芯片包(小熊派使用的是STM32L431RCT6)
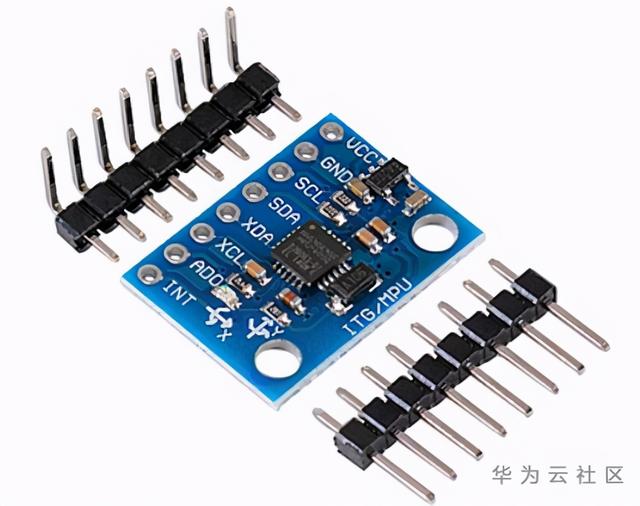
- 一个MPU6050模块(IIC接口)以及杜邦线
2.目标效果
- 通过CubeMX创建工程并配置参数
- IIC方式通信,配置MPU6050寄存器
- 小熊派通过IIC,获取陀螺仪、加速度计数据
- 串口1重定向输出编码器转动的角度、角速度
二、通过CubeMX生产MDK工程
A.芯片选择
- 打开CubeMX,进入芯片选择:
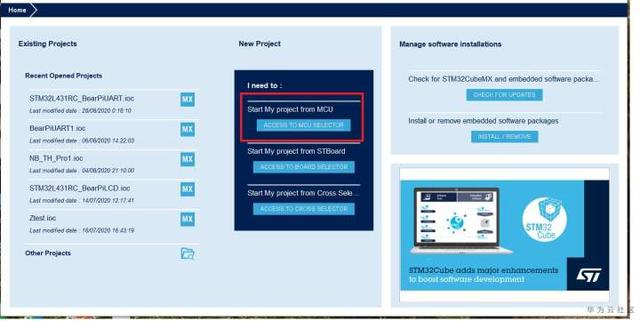
- 选择自己的stm32芯片(即STM32L431RCT6):

B.时钟源RCC设置
- 更改系统时钟源
系统时钟默认使用内部的高速时钟(HSI),选择使用HSE
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 655
655











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









