





点击蓝字关注我们
大家好,欢迎来到【高训工控】专业课堂第50期,本期由叶汉宁老师为大家带来:RobotStudio中工具设。
在RobotStudio软件中进行工作站的模拟布局时,虽然软件配置了一个包含工具设备、周边配件的设备模型库。但真正使用时大多数设备部件都是需要我们进行建模并在软件中进行配置添加,本期课程会就工具设备的添加配置进行一系列的讲解:
模型的导入
打开软件后,于文件→新建选项中选择空工作站进行新建:
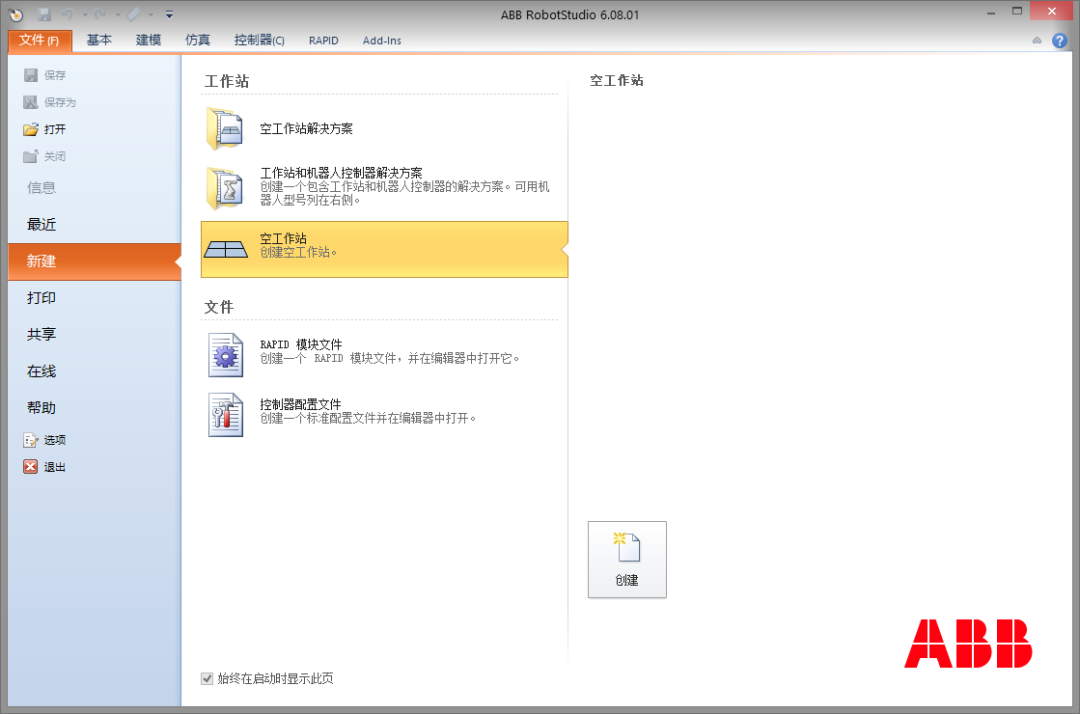
新建后,于图示“基本”菜单栏中的“导入几何”中,点击"浏览几何体..."。随后选择需要导入的模型进行导入,在此教程中,模型通过pro/E进行建模,另存为stp格式进行导入。
stp可连同草绘图形一并导入,提供更多点线参照
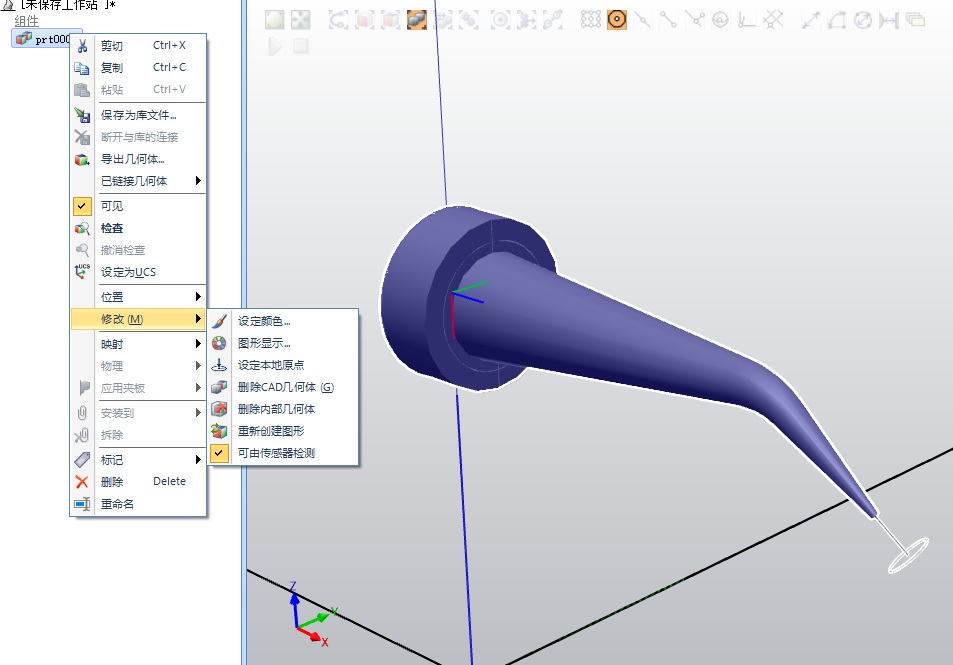
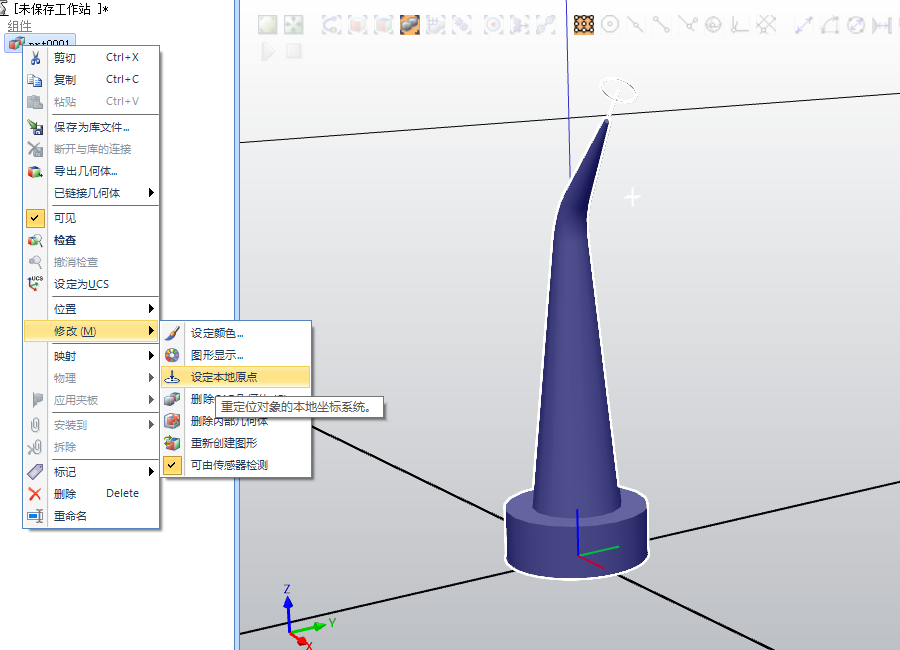
导入后,可在布局栏目中看到已导入的模型,对模型右击可弹出一系列操作选项。点击修改选项,可对模型进行外观的修改及基坐标系的设定。
创建工具模型的基坐标
工具模型安装在机器人上时,在软件仿真中是通过工具模型的基坐标系与机器人法兰盘上的初始工具坐标系Tool0对齐来实现的。工具模型的基坐标系设定步骤如下:
1.对模型进行放置操作,将其计划设定基坐标系的位置摆放至与工作站中的大地坐标系重合:
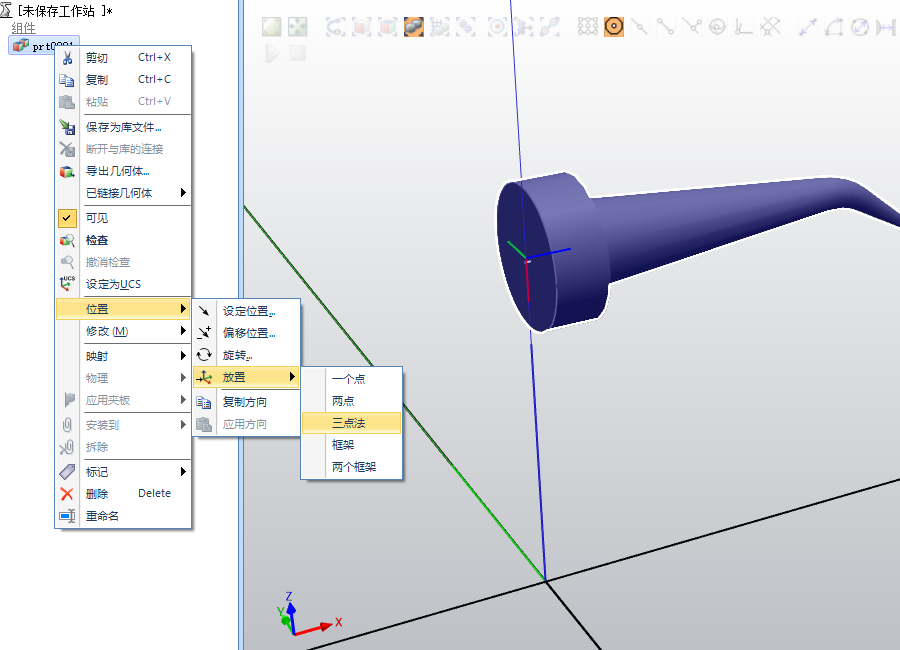
右击>位置>放置>三点法
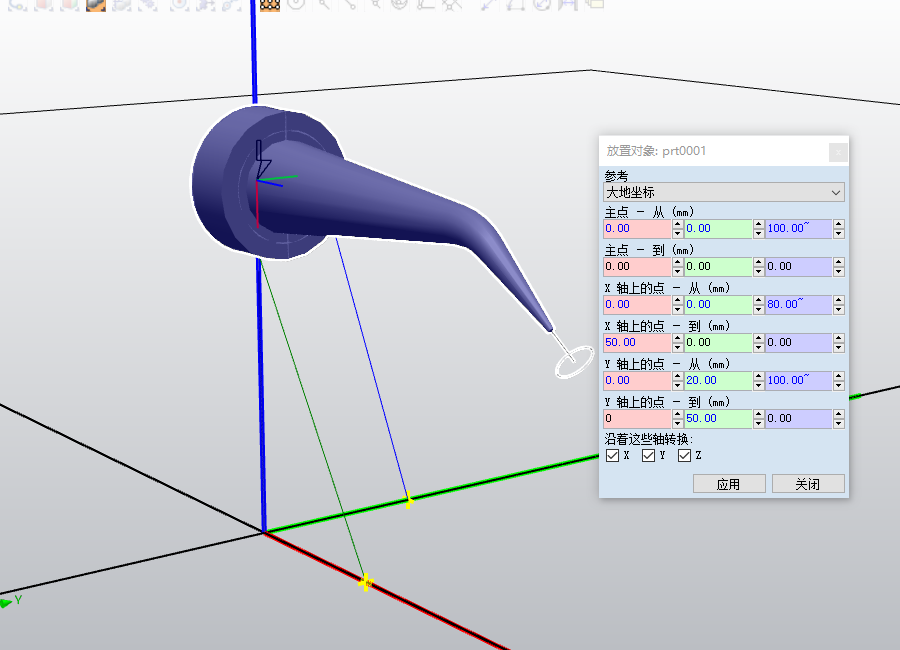
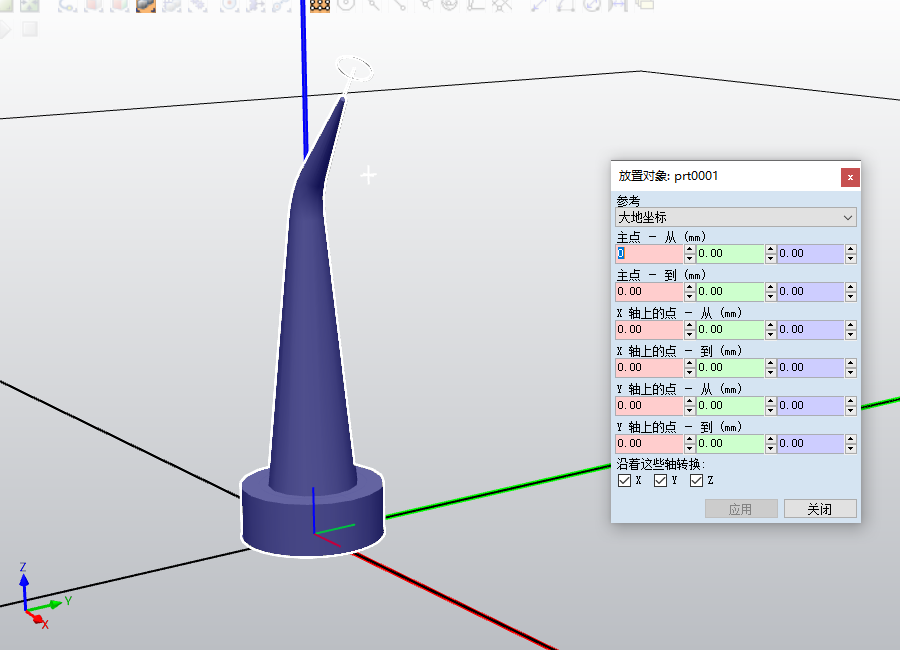
将模型安装位置放置至于大地坐标系重合
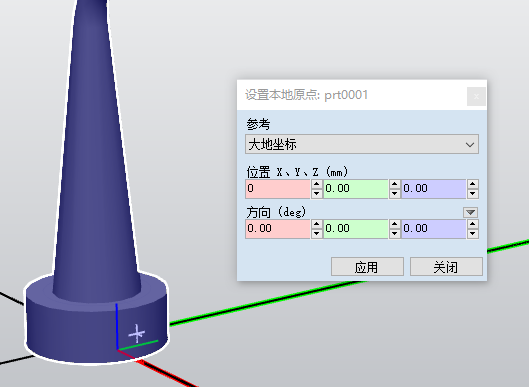
2.与修改选项中,点击“设定本地原点”。由于基坐标系已于大地坐标系重合,将位置值与方向值均设定为0,即完成设定:
3.设定完成后。可以导入一机器人模型。与布局栏中右击工具模型,选择"安装"操作将其装配至机器人法兰盘上,看是否符合需求:
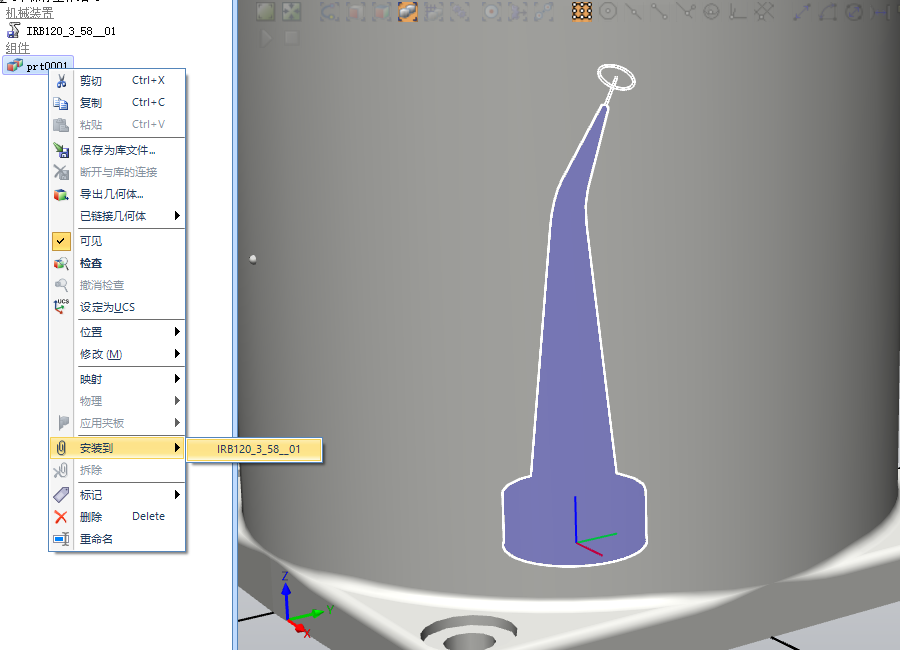
右击模型,选择安装到对应机器人上
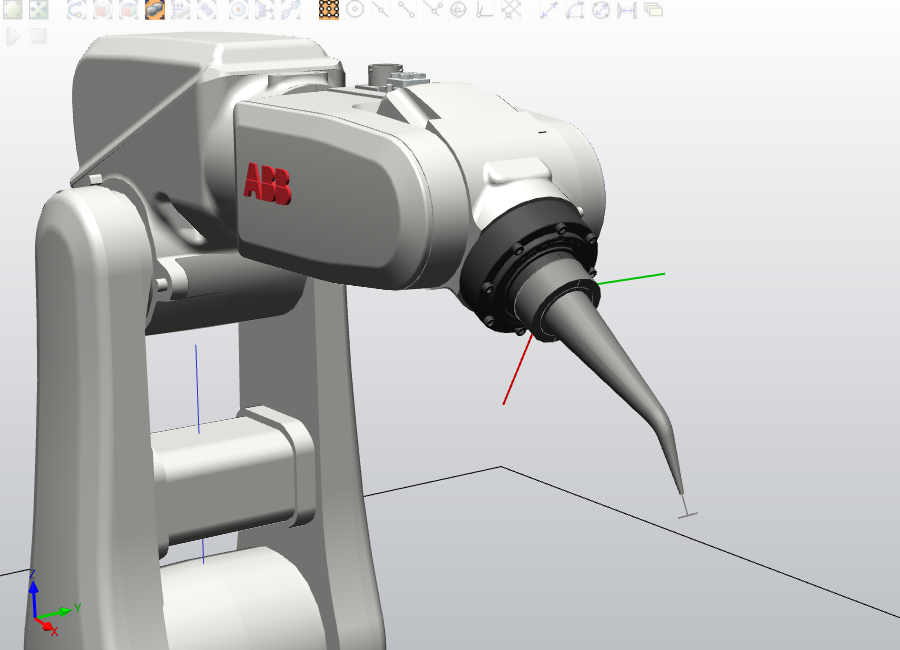
安装后的工具模型
备注:以上方法仅提供一个参考,根据需要也可以别的坐标系作为参照,位置值与方向值也可基于需求进行调整。此外,一般情况下,在建模软件中的初始坐标系在RobotStudio中会默认为工具模型的基坐标系,因此在对工具进行建模时可以注意一下,省去基坐标系的设定步骤。
创建工具模型的工具坐标系
设定完基坐标,确定模型可以正确安装至机器人上后,下一步便是建立其工具坐标系。其步骤如下:
1.点击框架选项,基于工具模型,建立对应的工具坐标系:
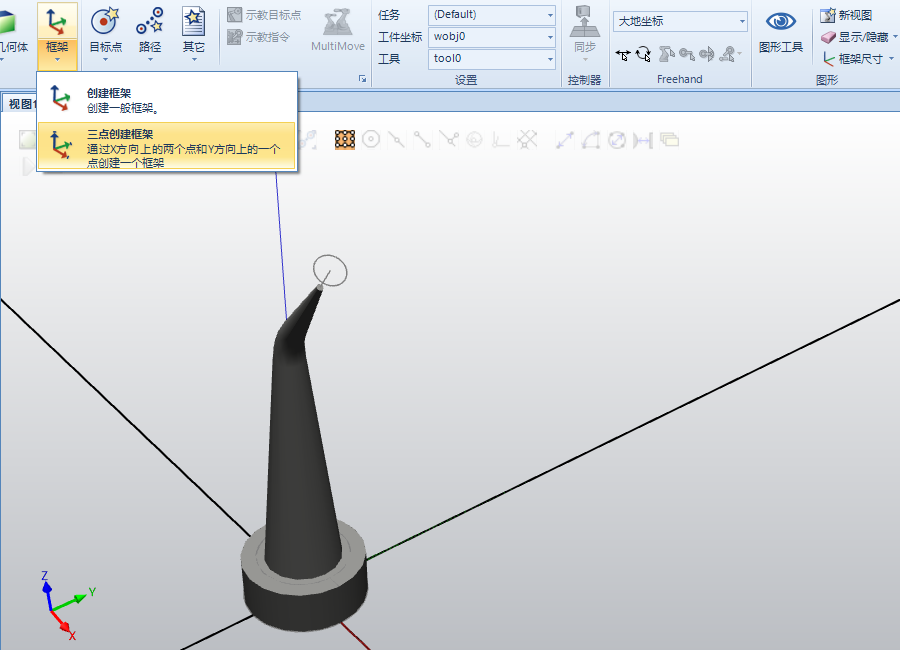
需要注意,前文中若通过"安装"操作将其装配至机器人进行检测后,需把模型“拆除”,再单独对该模型进行工具坐标系的创建。否则会在后续“创建工具”的环节造成导入问题。
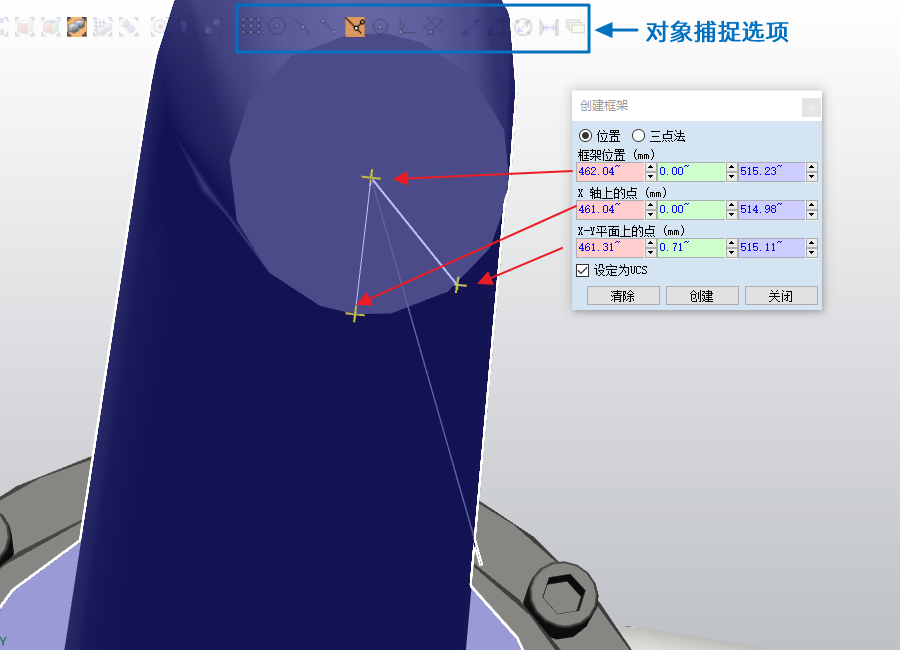
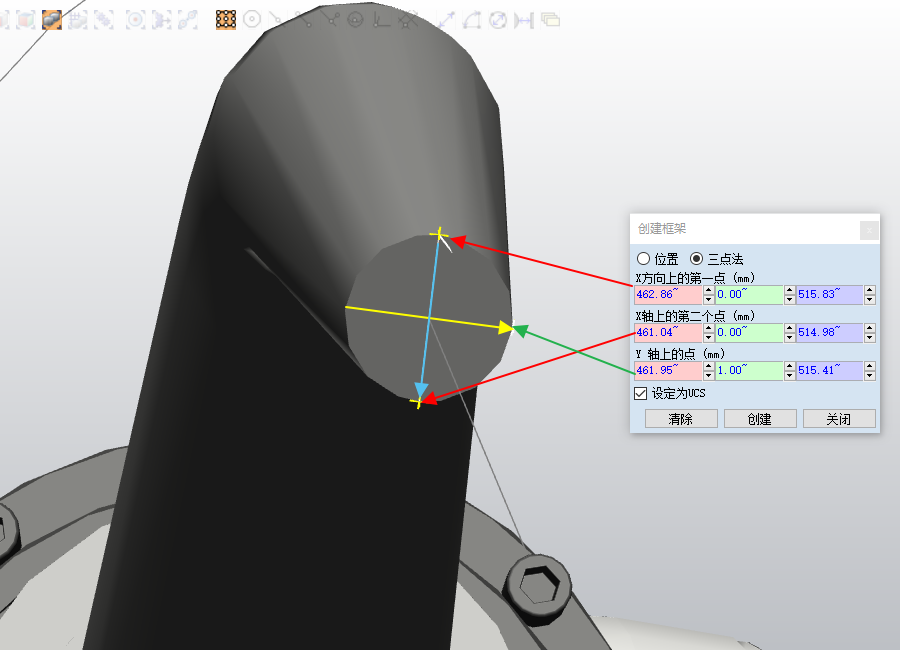
三点创建框架(坐标系)有两种设置方案,第一种为“位置”。如下图,利用合适的对象捕捉,分别选取框架位置(坐标系原点)与“X轴上的点”构成原点及X轴。然后选取一点为X-Y平面上的点,进而把Y轴的方向确定出来(该点为y轴正方向朝向);在确定X、Y两坐标轴方向后,Z轴也进而确定。
第二种方案“三点法”则如下图所示,先通过X1、X2两点建立X轴,再通过Y点作与X轴的垂线建立y轴,两轴线交点为原点。
此外,当一些模型因结构问题,难以选取参照来建立坐标系时,可于建模软件上绘制草绘线条保存为stp格式,于RobotStudio中作为参照:
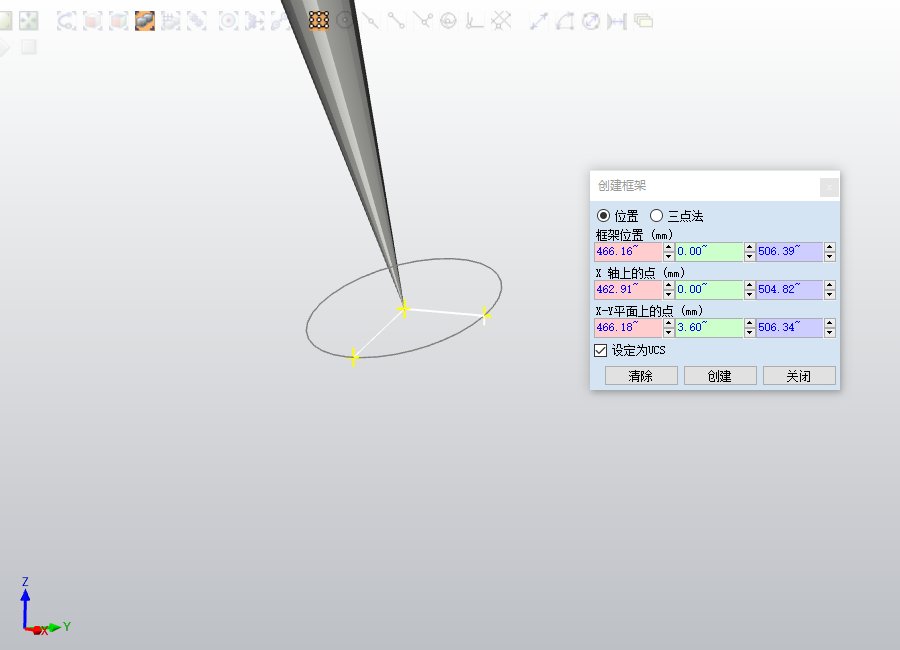
于尖端平面处的草绘圆进行坐标系创建
将新建坐标系与模型进行打包,创建工具文件
完成框架(坐标系)创建后,选取软件“建模”项目栏中的“创建工具”选项;

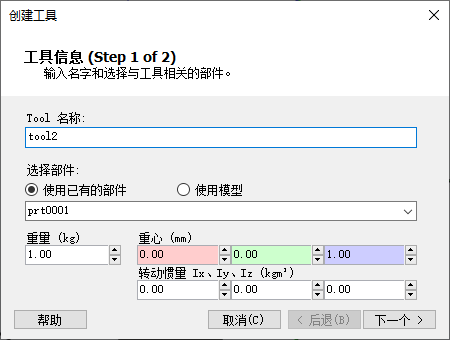
在弹出的界面中选择导入的工具模型,并输入重量重心等信息(可于建模软件中查看)
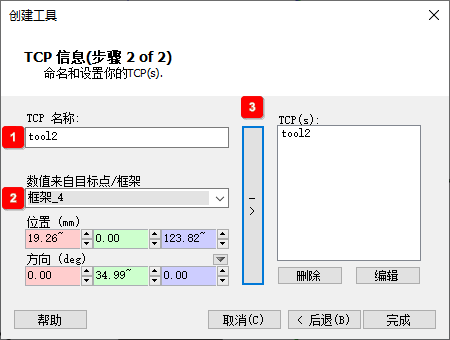
随后输入自带工具坐标的名称,并选择之前创建的坐标系作为数据来源,最后点击序号3下方的按钮确定生成;由于一些工具模型具备多个作业工具,可重复1、2步骤为该模型导入多个工具坐标。
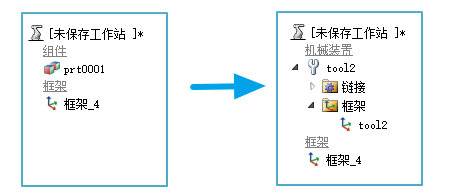
点击完成,完成新工具的创建。此时于布局栏中可看到模型文件与框架已生成了附带工具坐标系的工具文件。
最后,于布局栏中选择该工具,将其保存入软件的工具库,方便之后项目的调用。
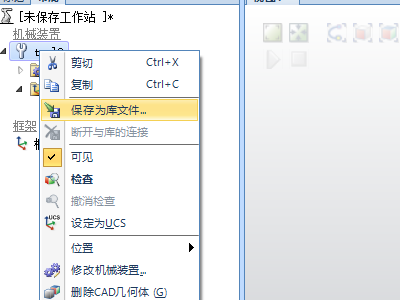
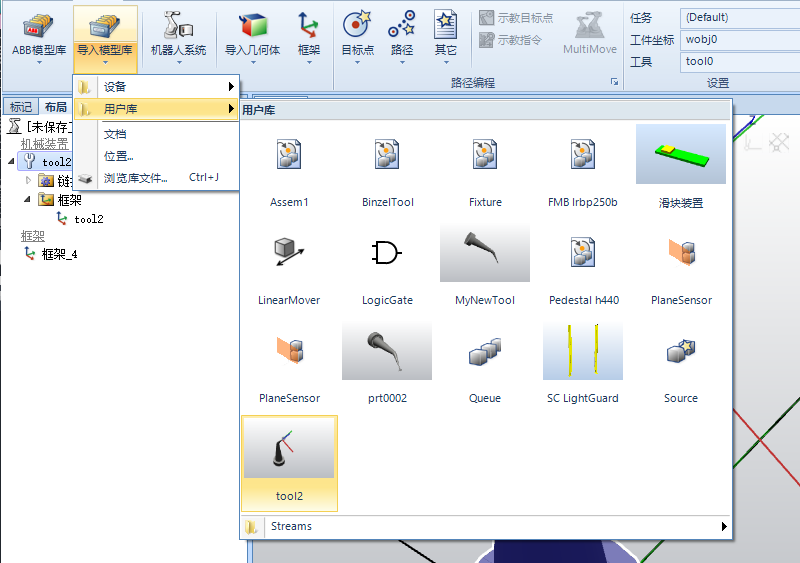
保存为库文件后,可于导入模型库>用户库中进行查看与调用
以上就是在RobotStudio软件中添加自定义作业工具的流程,本期课程就到这些,感谢大家观看。

扫描二维码
关注我们
















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









