







基于opencv的工件缺陷检测C++和python实现
作为研究生,每一个项目都很重要,这里给大家分享一个好入门项目,代码纯自己写,网上都是python的,但是有些企业要求C++编写项目,所以希望大家能学到东西。
一. 问题陈述
工件的展示,这是一个视频,然后工件一个个经过,要检测出哪个工件有缺陷,并且分类缺陷的种类。可以看到缺陷是不止一种。


二. 代码步骤
1.读取图像,转为灰度图并二值化
cvtColor(img, gray, COLOR_BGR2GRAY);
threshold(gray, thresh, 127, 255, THRESH_TOZERO_INV);、
2.寻找轮廓
std::vector<Vec4i> hireachy;
std::vector<std::vector<Point>> contours;
findContours(thresh, contours, hireachy, RETR_LIST, CHAIN_APPROX_NONE);
3.遍历轮廓,对工件圈进行统计,防止重复标记
原理是计算图像矩,可以确定图像的灰度中心,根据每个时刻每个工件的中心位置的变换,可以判断画面里是否出现新的工件。同时,也要记得更新每个时刻每个工件的位置。具体代码实现可以参考完整工程文件。这里贴出部分:
for (size_t cnt = 0; cnt < contours.size(); cnt++)
{
double area = contourArea(contours[cnt]); //求轮廓面积(大约的)
if (area > 18000 & area < 28000) //把工件圈出来
{
mu[cnt] = moments(contours[cnt], false); //计算图像矩,表示工件的位置
//计算图像质心位置
double cx = mu[cnt].m10 / mu[cnt].m00;
double cy = mu[cnt].m01 / mu[cnt].m00;
boundRect[cnt] = boundingRect(Mat(contours[cnt])); //计算外接矩形
new_object = true;
//通过质心位置判断视频出现的工件是否是最新的
if (cx > 100) //工件要全部出现
{
if (products.size() > 0) //判断出现的工件是不是新的
{
for (size_t i = 0; i < products.size(); i++)
{
//存在一个
if (fabs(cx - products[i].getX()) <= 35 && fabs(cy - products[i].getY()) <= 35)
{
new_object = false;
//更新位置参数
products[i].updateCoords(cx, cy, boundRect[cnt].x, boundRect[cnt].y, boundRect[cnt].width, boundRect[cnt].height);
}
}
}
if (new_object == true)
{
Product p(pid, cx, cy, boundRect[cnt].x, boundRect[cnt].y, boundRect[cnt].width, boundRect[cnt].height);
p.save_pic(img);
products.emplace_back(p);
p.count = pid;
defects = p.defect_detect(); //缺陷检测
pid += 1;
}
}
//圈出来
rectangle(img, boundRect[cnt].tl(), boundRect[cnt].br(), Scalar(0, 0, 255), 2, 8, 0);
}
}
效果是这样:

4.遍历轮廓,把工件圈出来,顺便保存调试,如下图。圈出来的原理也不难,其实就是通过函数
boundRect[cnt] = boundingRect(Mat(contours[cnt]));
计算外接矩形,就可以获得矩形的左上角和右下角坐标,就可以画了。效果如下:



5.对每个框进行缺陷提取,原理依然是轮廓检测加面积判断。效果如下:


6.缺陷类型判断,这里利用直方图统计。即统计0-255中每个像素的个数,根据个数,转为百分比,接着我们设定一个阈值,就可以判断出缺陷类型。部分代码:
//------------------------直方图计算
Mat hist;
//设定像素取值范围
int histSize = 256;
float range[] = {0, 256};
const float *histRanges = {range};
// hist索引为像素,值为像素点的个数
calcHist(&resul, 1, 0, Mat(), hist, 1, &histSize, &histRanges, true, false);
//-------------------------判断缺陷
float sum = 0;
for (int i = 0; i < 256; i++)
{
float bin_val = hist.at<float>(i); //遍历hist元素(注意hist中是float类型)
sum = sum + bin_val; //计算总的个数
}
// std::cout << "sum:"
// << sum << "\n";
//计算各个像素点的个数百分比
for (int i = 0; i < 256; i++)
{
if (hist.at<float>(i) > 0) //像素点个数大于0的时候
{
hist.at<float>(i) = hist.at<float>(i) / sum;
}
// std::cout << "hist:"
// << hist.at<float>(i) << "\n";
}
float hist_sum_scratch = 0;
float hist_sum_blot = 0;
for (int i = 90; i < 135; i++) //比较灰的
{
hist_sum_scratch = hist_sum_scratch + hist.at<float>(i);
}
std::cout << "hist_sum_scratch:"
<< hist_sum_scratch << "\n";
for (int i = 15; i < 90; i++) //比较黑的
{
hist_sum_blot = hist_sum_blot + hist.at<float>(i);
}
std::cout << "hist_sum_blot:"
<< hist_sum_blot << "\n";
if (hist_sum_scratch >= hist_sum_blot)
{
Defect d(1, boundRect[cnt].x, boundRect[cnt].y, boundRect[cnt].width, boundRect[cnt].height);
Result.emplace_back(d);
state = 1;
std::cout << "此处缺陷划痕"
<< "\n";
}
if (hist_sum_scratch < hist_sum_blot)
{
Defect d(2, boundRect[cnt].x, boundRect[cnt].y, boundRect[cnt].width, boundRect[cnt].height);
Result.emplace_back(d);
state = 2;
std::cout << "此处缺陷污渍"
<< "\n";
}
到此就可以完成啦!!!
三. 最终效果:

可以看到,会在终端打印相关消息
C++代码纯自己写,有多文件,花了一些时间总结,大家可以私信我拿代码
另外,也准备了python代码,需要的也可以私信我。
因为花费不少时间,所以希望大家给点报酬支持一下,继续加油进入下一个实战项目分享。
------------------------------------补充内容---------------------------------
一.ubuntu下使用
由于很多小伙伴下载代码之后不知道怎么使用这代码,今天就补充一下。首先,我们需要安装opencv与dlib,参考下我的另外一篇文章:
ubuntu20+dlib19.22+0pencv4.5.0的机器视觉算法之路(一).
1.删除buiild文件夹里面的所有文件
2.路径打开到build, 执行
cmake ..
3.接着
make
4.执行
./result 文件路径
二.win下使用
分享的C++代码是在ubuntu的cmake跑的,可能有人是在win的vs跑。以下是使用步骤:
1.安装opencv,版本4.几就行,比如4.5这样子,自己百度安装,无论是在win的Visual Studio,还是ubuntu的cmake,需要自己安装好opencv,并测试官方例子通过。
2.win的Visual Studio,则自己先创建C++工程,在工程里面先测试opencv没问题,然后把.cpp和.h文件复制到工程。注意,代码的格式百分之百没问题,如果报错,比如说分号有问题等,就是源文件的编码问题,可以把每个文件的代码全选复制粘贴到百度翻译,再复制粘贴回来,这样在win的环境下,文件的编码就没有问题,之前给别人跑过亲测有效。
3.改视频文件的路径:如果文件编码没问题,不会瞎报错了,但是报错找不到mp4文件,或者是没有输入参数,则需要手动改输入的mp4文件路径,比如:
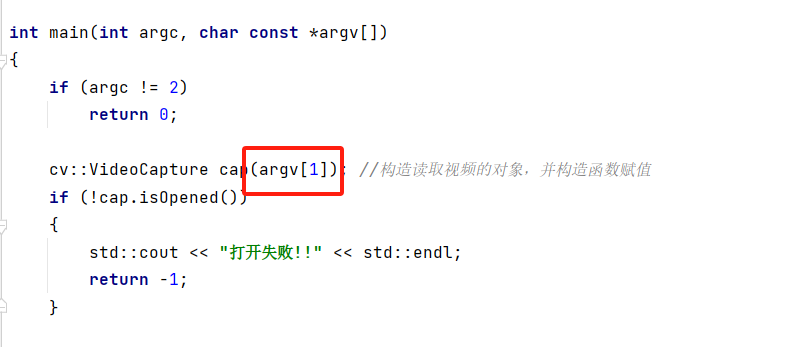
红框内容改为
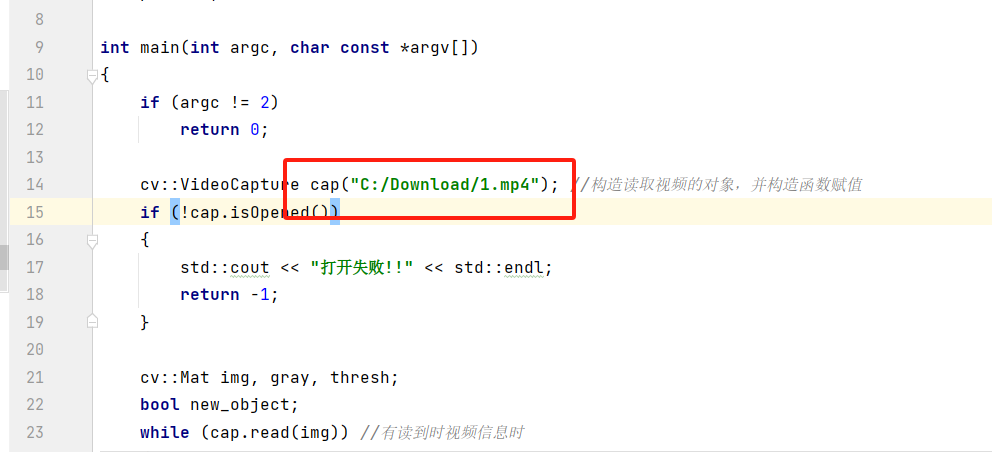
然后用Visual Studio创建的工程运行main.py就行。
搞定,完结,欢迎大家来学习,当作自己的一个项目,或者可以进一步去扩展成其他东西,懂的都懂。


















 2464
2464

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











