




在智能驾驶领域,轨迹规划问题可以抽象成在一定约束条件下寻找最优解的问题,优化变量、状态方程和约束条件是决定优化问题求解复杂性的关键要素。坐标系的选择不仅是解决问题首先要考虑的,而且对优化问题形式和复杂性有着至关重要的影响。
智能驾驶领域中广泛使用的坐标系有Frenet坐标系(sl坐标系)和Cartesian坐标系(xy坐标系),两者最大的区别在于坐标轴是否允许为曲线,Cartesian坐标系即几何中常见的直角坐标系,两条坐标轴是相互正交的直线。而Frenet坐标系允许一条坐标轴为曲线(参考线s),故又称为曲线坐标系。
从定义上可以直觉得出Frenet坐标系特别适合自动驾驶领域的结论,因为只要将道路的中心线作为参考线,就可以将复杂的道路环境简化为直线隧道模型,图1显示了Cartesian坐标系向Frenet坐标系的转换。
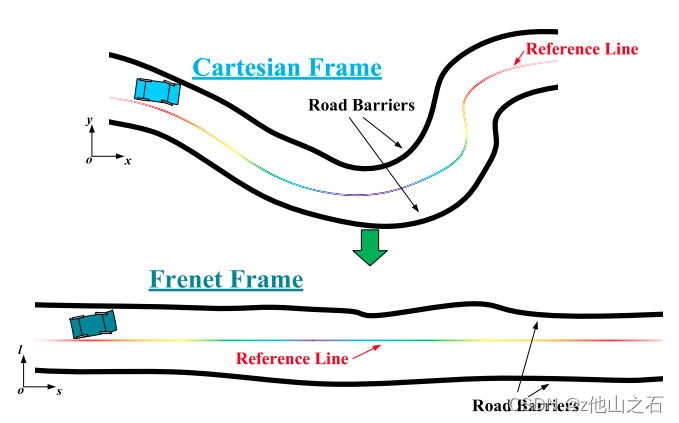
图1 [1]
将弯曲的道路拉直,这是Frenet坐标系最大(也许是唯一)的优点,怎么评估这个优点的大小?在自动驾驶领域,道路边界是一个不得不处理的约束,很多情况下,非线性的道路边界也是最难处理的约束。这种转换直接将非线性的道路边界约束变成了线性的约束,从而大大简化了后续优化问题的求解。此外,现实中的车辆大多数时候都是沿着道路中心线行驶的,所以在Frenet坐标系中,车辆的运动可以直接解耦为纵向运动和横向运动,实现了降维的效果,这是在Cartesian坐标系中是很难
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 5907
5907

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









