







文章目录
前言
Frenet坐标系在无人驾驶领域被普遍使用,特别是在城市、高速等道路交通环境下无人驾驶的路径规划系统中。Frenet坐标系使用道路的中心线作为Base frame(参考线Reference line),使用参考线的切线向量和法线向量建立坐标系。相比笛卡尔坐标系,Frenet坐标系简化了路径规划问题。网上关于Frenet坐标系的博客或资料很多,此处不再赘述。本文先给出简单的转换公式推导过程,然后给出三对Frenet坐标系与Cartesian坐标系互转的python代码与使用示例方便自己查阅使用。详细推导参见博客Apollo项目坐标系研究。note:下图中Frenet的q坐标轴也可以用d或l表示。

关于Frenet坐标系形象的理解:
参考:基于Frenet坐标系的无人车轨迹规划详解与实现_frenet坐标系csdn-CSDN博客
既然方法的名字叫“基于Frenet坐标系的轨迹规划”,那首先必须理解什么是“Frenet坐标系”。我们想象一下自己开车时,最简单省劲的策略就是沿着道路上的导引线开。这也是车道线存在的意义。我们把车道线想象成一条连续的曲线。对于一条曲线,如果它是光滑可微的,那么曲线上的每一点处都可以求切线。求切线的目的是它定义了一个方向向量。切线有了,再逆时针旋转90°就能得到一条法线,如下图所示。很显然,切线和法线还有它们的交点就构成了一个直角坐标系,这个坐标系就是传说中的Frenet坐标系。所以Frenet坐标系也是一个直角坐标系,没什么神秘的,大家不用害怕。为了便于理解,我特意用Mathematica做了一个演示动画。黑色曲线代表道路参考线,用鼠标能选择曲线上不同的点,随着鼠标移动道路上的点也在不断变化,对应的Frenet坐标系就跟着变化,很形象了吧。

轨迹规划基于Frenet坐标系,完成轨迹规划后,应转化为Cartesian坐标系供控制使用:
在Frenet坐标系下,经规划得到横向、纵向运动轨迹后,需要将其重新映射到全局笛卡尔坐标系,以供控制模块调用。
如图 所示, 受车辆运动学、动力学特性及道路环境 (避障) 限制, 车辆的实际行驶轨迹与参考线难以重合。

使用Frenet坐标系的优势:

一、Frenet坐标系与Cartesian坐标系的转换公式推导
1 Frenet公式
- 曲率:曲线不能形成一条直线的度量值,曲率越趋于0,则曲线越趋近于直线;
- 挠率:是曲线不能形成在同一平面内运动曲线的度量值,挠率越趋于0,则曲线越趋近于在同一平面内运动。
在大地表面,局部路面可看作一个平面,对于无人驾驶路径规划应用,挠率可设定为0。从而Frenet公式进一步简化为:





2 简单推导过程
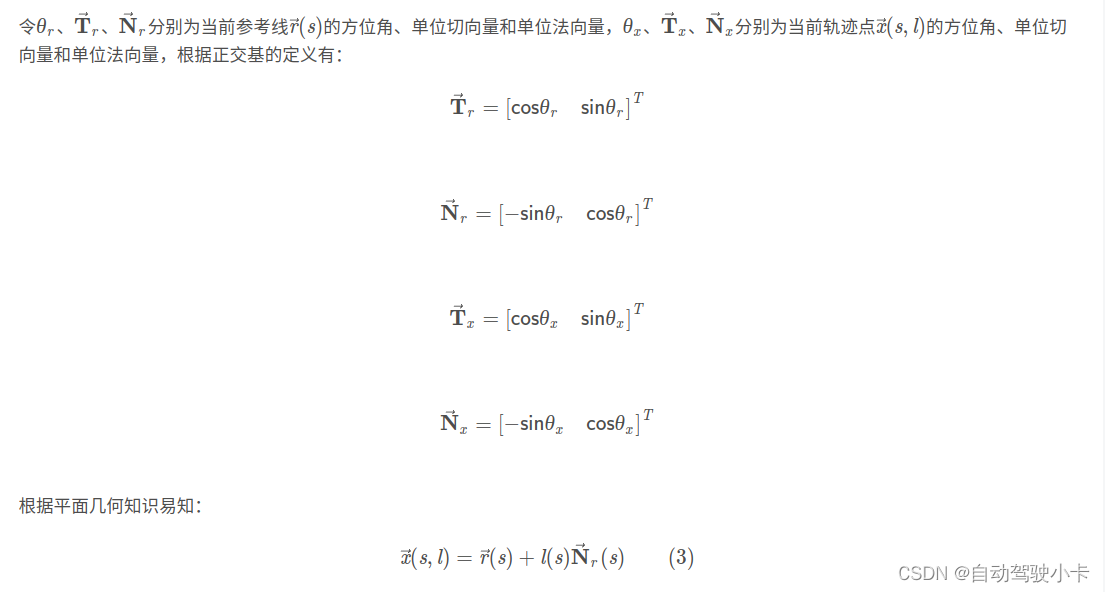
引博客Apollo项目坐标系研究中的图如下:
注意:向量x为当前车的轨迹点,向量r为参考线的点
注意:曲率 kx = dtheart/ds,仅在Cartesian坐标系下成立,在Frenet坐标系下不成立。
此处求s时,需要注意这里的s指的是距离自车位置最近的点(参考曲线上寻找)处的s就是Frenet坐标系下的s 。这里不同于控制使用的目标点(指的是投影点),最近点在控制中称为匹配点。








二、Frenet坐标系与Cartesian坐标系的相互转换最终公式
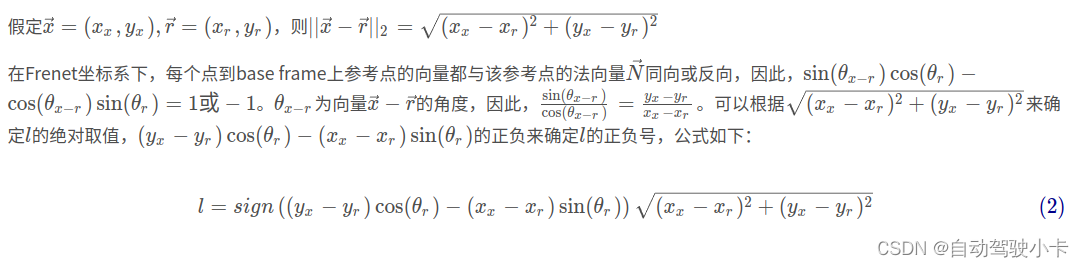
1 Cartesian转 Frenet
参考:【自动驾驶】Frenet坐标系与Cartesian坐标系(一)-CSDN博客


2 Frenet转Cartesian
参考:【自动驾驶】Frenet坐标系与Cartesian坐标系(一)-CSDN博客


Apollo项目中Frenet坐标系与笛卡尔坐标系转换代码:
函数声明文件planning/math/frame_conversion/cartesian_frenet_conversion.h:
#ifndef MODULES_PLANNING_MATH_FRAME_CONVERSION_CARTESIAN_FRENET_CONVERSION_H_
#define MODULES_PLANNING_MATH_FRAME_CONVERSION_CARTESIAN_FRENET_CONVERSION_H_
#include <array>
#include "modules/common/math/vec2d.h"
namespace apollo {
namespace planning {
// Notations:
// s_condition = [s, s_dot, s_ddot]
// s: longitudinal coordinate w.r.t reference line.
// s_dot: ds / dt
// s_ddot: d(s_dot) / dt
// d_condition = [d, d_prime, d_pprime]
// d: lateral coordinate w.r.t. reference line
// d_prime: dd / ds
// d_pprime: d(d_prime) / ds
// l: the same as d.
class CartesianFrenetConverter {
public:
CartesianFrenetConverter() = delete;
/**
* Convert a vehicle state in Cartesian frame to Frenet frame.
* Decouple a 2d movement to two independent 1d movement w.r.t. reference
* line.
* The lateral movement is a function of longitudinal accumulated distance s
* to achieve better satisfaction of nonholonomic constraints.
*/
static void cartesian_to_frenet(const double rs, const double rx,
const double ry, const double rtheta,
const double rkappa, const double rdkappa,
const double x, const double y,
const double v, const double a,
const double theta, const double kappa,
std::array<double, 3>* const ptr_s_condition,
std::array<double, 3>* const ptr_d_condition);
/**
* Convert a vehicle state in Frenet frame to Cartesian frame.
* Combine two independent 1d movement w.r.t. reference line to a 2d movement.
*/
static void frenet_to_cartesian(const double rs, const double rx,
const double ry, const double rtheta,
const double rkappa, const double rdkappa,
const std::array<double, 3>& s_condition,
const std::array<double, 3>& d_condition,
double* const ptr_x, double* const ptr_y,
double* const ptr_theta,
double* const ptr_kappa, double* const ptr_v,
double* const ptr_a);
// given sl point extract x, y, theta, kappa
static double CalculateTheta(const double rtheta, const double rkappa,
const double l, const double dl);
static double CalculateKappa(const double rkappa, const double rdkappa,
const double l, const double dl,
const double ddl);
static common::math::Vec2d CalculateCartesianPoint(
const double rtheta, const common::math::Vec2d& rpoint, const double l);
/**
* @brief: given sl, theta, and road's theta, kappa, extract derivative l,
*second order derivative l:
*/
static double CalculateLateralDerivative(const double theta_ref,
const double theta, const double l,
const double kappa_ref);
// given sl, theta, and road's theta, kappa, extract second order derivative
static double CalculateSecondOrderLateralDerivative(
const double theta_ref, const double theta, const double kappa_ref,
const double kappa, const double dkappa_ref, const double l);
};
} // namespace planning
} // namespace apollo
函数实现文件planning/math/frame_conversion/cartesian_frenet_conversion.cc:
#include "modules/planning/math/frame_conversion/cartesian_frenet_conversion.h"
#include <cmath>
#include "modules/common/log.h"
#include "modules/common/math/math_utils.h"
namespace apollo {
namespace planning {
using apollo::common::math::Vec2d;
void CartesianFrenetConverter::cartesian_to_frenet(
const double rs, const double rx, const double ry, const double rtheta,
const double rkappa, const double rdkappa, const double x, const double y,
const double v, const double a, const double theta, const double kappa,
std::array<double, 3>* const ptr_s_condition,
std::array<double, 3>* const ptr_d_condition) {
const double dx = x - rx;
const double dy = y - ry;
const double cos_theta_r = std::cos(rtheta);
const double sin_theta_r = std::sin(rtheta);
const double cross_rd_nd = cos_theta_r * dy - sin_theta_r * dx;
// 求解d
ptr_d_condition->at(0) =
std::copysign(std::sqrt(dx * dx + dy * dy), cross_rd_nd);
const double delta_theta = theta - rtheta;
const double tan_delta_theta = std::tan(delta_theta);
const double cos_delta_theta = std::cos(delta_theta);
const double one_minus_kappa_r_d = 1 - rkappa * ptr_d_condition->at(0);
// 求解d' = dd / ds
ptr_d_condition->at(1) = one_minus_kappa_r_d * tan_delta_theta;
const double kappa_r_d_prime =
rdkappa * ptr_d_condition->at(0) + rkappa * ptr_d_condition->at(1);
// 求解d'' = dd' / ds
ptr_d_condition->at(2) =
-kappa_r_d_prime * tan_delta_theta +
one_minus_kappa_r_d / cos_delta_theta / cos_delta_theta *
(kappa * one_minus_kappa_r_d / cos_delta_theta - rkappa);
// 求解s
ptr_s_condition->at(0) = rs;
// 求解ds / dt
ptr_s_condition->at(1) = v * cos_delta_theta / one_minus_kappa_r_d;
const double delta_theta_prime =
one_minus_kappa_r_d / cos_delta_theta * kappa - rkappa;
// 求解d(ds) / dt
ptr_s_condition->at(2) =
(a * cos_delta_theta -
ptr_s_condition->at(1) * ptr_s_condition->at(1) *
(ptr_d_condition->at(1) * delta_theta_prime - kappa_r_d_prime))
/ one_minus_kappa_r_d;
return;
}
void CartesianFrenetConverter::frenet_to_cartesian(
const double rs, const double rx, const double ry, const double rtheta,
const double rkappa, const double rdkappa,
const std::array<double, 3>& s_condition,
const std::array<double, 3>& d_condition, double* const ptr_x,
double* const ptr_y, double* const ptr_theta, double* const ptr_kappa,
double* const ptr_v, double* const ptr_a) {
CHECK(std::abs(rs - s_condition[0]) < 1.0e-6)
<< "The reference point s and s_condition[0] don't match";
const double cos_theta_r = std::cos(rtheta);
const double sin_theta_r = std::sin(rtheta);
*ptr_x = rx - sin_theta_r * d_condition[0];
*ptr_y = ry + cos_theta_r * d_condition[0];
const double one_minus_kappa_r_d = 1 - rkappa * d_condition[0];
const double tan_delta_theta = d_condition[1] / one_minus_kappa_r_d;
const double delta_theta = std::atan2(d_condition[1], one_minus_kappa_r_d);
const double cos_delta_theta = std::cos(delta_theta);
*ptr_theta = common::math::NormalizeAngle(delta_theta + rtheta);
const double kappa_r_d_prime =
rdkappa * d_condition[0] + rkappa * d_condition[1];
*ptr_kappa = (((d_condition[2] + kappa_r_d_prime * tan_delta_theta) *
cos_delta_theta * cos_delta_theta) /
(one_minus_kappa_r_d) +
rkappa) *
cos_delta_theta / (one_minus_kappa_r_d);
const double d_dot = d_condition[1] * s_condition[1];
*ptr_v = std::sqrt(one_minus_kappa_r_d * one_minus_kappa_r_d *
s_condition[1] * s_condition[1] +
d_dot * d_dot);
const double delta_theta_prime =
one_minus_kappa_r_d / cos_delta_theta * (*ptr_kappa) - rkappa;
*ptr_a = s_condition[2] * one_minus_kappa_r_d / cos_delta_theta +
s_condition[1] * s_condition[1] / cos_delta_theta *
(d_condition[1] * delta_theta_prime - kappa_r_d_prime);
}
double CartesianFrenetConverter::CalculateTheta(const double rtheta,
const double rkappa,
const double l,
const double dl) {
return common::math::NormalizeAngle(rtheta + std::atan2(dl, 1 - l * rkappa));
}
double CartesianFrenetConverter::CalculateKappa(const double rkappa,
const double rdkappa,
const double l, const double dl,
const double ddl) {
double denominator = (dl * dl + (1 - l * rkappa) * (1 - l * rkappa));
if (std::fabs(denominator) < 1e-8) {
return 0.0;
}
denominator = std::pow(denominator, 1.5);
const double numerator = rkappa + ddl - 2 * l * rkappa * rkappa -
l * ddl * rkappa + l * l * rkappa * rkappa * rkappa +
l * dl * rdkappa + 2 * dl * dl * rkappa;
return numerator / denominator;
}
Vec2d CartesianFrenetConverter::CalculateCartesianPoint(const double rtheta,
const Vec2d& rpoint,
const double l) {
const double x = rpoint.x() - l * std::sin(rtheta);
const double y = rpoint.y() + l * std::cos(rtheta);
return Vec2d(x, y);
}
double CartesianFrenetConverter::CalculateLateralDerivative(
const double rtheta, const double theta, const double l,
const double rkappa) {
return (1 - rkappa * l) * std::tan(theta - rtheta);
}
double CartesianFrenetConverter::CalculateSecondOrderLateralDerivative(
const double rtheta, const double theta, const double rkappa,
const double kappa, const double rdkappa, const double l) {
const double dl = CalculateLateralDerivative(rtheta, theta, l, rkappa);
const double theta_diff = theta - rtheta;
const double cos_theta_diff = std::cos(theta_diff);
const double res = -(rdkappa * l + rkappa * dl) * std::tan(theta - rtheta) +
(1 - rkappa * l) / (cos_theta_diff * cos_theta_diff) *
(kappa * (1 - rkappa * l) / cos_theta_diff - rkappa);
if (std::isinf(res)) {
AWARN << "result is inf when calculate second order lateral "
"derivative. input values are rtheta:"
<< rtheta << " theta: " << theta << ", rkappa: " << rkappa
<< ", kappa: " << kappa << ", rdkappa: " << rdkappa << ", l: " << l
<< std::endl;
}
return res;
}
总结

本文为学习总结笔记,主要参考下述大神博主的讲解,进行归纳整合,如涉及侵权,请联系删除。
参考博客:
1.Frenet坐标系与Cartesian坐标系互转(一):公式推导_frenet坐标系转换-CSDN博客
2.轨迹规划1:Frenet坐标转化公式推导_frenet坐标系参数转化-CSDN博客
4.https://adamshan.blog.csdn.net/article/details/80779615
5.【自动驾驶】Frenet坐标系与Cartesian坐标系(二)_frenet和cartesian坐标转换实例-CSDN博客
















 4549
4549











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









