







1 空间分析之常用工具
空间分析扩展模块中提供了很多方便栅格处理的工具。其中提取(Extraction)、综合(Generalization)等工具集中提供的功能是在分析处理数据中经常会用到的。
1.1 提取(Extraction)
顾名思义,这组工具就是方便我们将栅格数据按照某种条件来筛选提取。
工具集中提供了如下工具:
ExtractbyAttributes:按属性提取,按照SQL表达式筛选像元值。
ExtractbyCircle:按圆形提取,定义圆心和半径,按圆形提取栅格。
ExtractbyMask:按掩膜提取,按指定的栅格数据或矢量数据的形状提取像元。
ExtractbyPoints:按点提取,按给定坐标值列表进行提取。
ExtractbyPolygon
ExtractbyRectangle
ExtractValuestoPoints:按照点要素的位置提取对应的(一个/多个)栅格数据的像元值,其中,提取的Value可以使用像元中心值或者选择进行双线性插值提取。
Sample:采样,根据给定的栅格或者矢量数据的位置提取像元值,采样方法可选:最邻近分配法(Nearest)、双线性插值法(Bilinear)、三次卷积插值法(Cubic)。
以上工具用来提取栅格中的有效值、兴趣区域\点等很有用。
1.2 综合
这组工具主要用来清理栅格数据,可以大致分为三个方面的功能:更改数据的分辨率、对区域进行概化、对区域边缘进行平滑。
这些工具的输入都要求为整型栅格。
1. 更改数据分辨率
Aggregate:聚合,生成降低分辨率的栅格。其中,CellFactor需要是一个大于1的整数,表示生成栅格的像元大小是原来的几倍。
生成新栅格的像元值可选:新的大像元所覆盖的输入像元的总和值、最小值、最大值、平均值、中间值。
2. 对区域进行概化
Expand:扩展,按指定的像元数目扩展指定的栅格区域。
Shrink:收缩,按指定的像元数目收缩所选区域,方法是用邻域中出现最频繁的像元值替换该区域的值。
Nibble:用最邻近点的值来替换掩膜范围内的栅格像元的值。
Thin:细化,通过减少表示要素宽度的像元数来对栅格化的线状对象进行细化。
RegionGroup:区域合并,记录输出中每个像元所属的连接区域的标识。每个区域都将被分配给唯一编号。
3. 对区域边缘进行平滑
BoundaryClean:边界清理,通过扩展和收缩来平滑区域间的边界。该工具会去更改X或Y方向上所有少于三个像元的位置。
MajorityFilter:众数滤波,根据相邻像元数据值的众数替换栅格中的像元。可以认为是“少数服从多数”,太突兀的像元被周围的大部队干掉了。其中“大部队”的参数可设置,相邻像元可以4邻域或者8邻域,众数可选,需要大部分(3/4、5/8)还是过半数即可。
TIPS:这两个工具仅支持整形栅格输入。
2 空间分析之多元分析
通过多元统计分析可以探查许多不同类型属性之间的关系。有两种可用的多元分析:
分类(监督分类和非监督分类Supervised&Unsupervised)
主成分分析(PrincipalComponentAnalysisPCA)
1.3 波段集统计工具(BandCollectionStatistics)
栅格波段必须具有一个公共交集。如果不存在公共交集,则会出现错误,且不会创建任何输出。如果栅格波段的范围不同,统计数据将以所有输入栅格波段的共同的空间范围来计算。默认情况下,像元大小为输入栅格的最大像元的大小;否则,将取决于栅格分析环境设置。
此工具计算每个图层的基本统计测量值(最小值、最大值、平均值和标准差),如果勾选协方差和相关矩阵,还可以得到这两个值。
1.4 创建特征(CreateSignatures)
创建由输入样本数据和一组栅格波段定义的类和ASCII特征文件。该工具可创建将用作其他多元分析工具的输入参数的文件。
该文件由两部分组成:
1) 所有类的常规信息,例如图层数、输入栅格名称和类别数。
2) 每个类别的特征文件,由样本数、平均值和协方差矩阵组成。
1.5 编辑特征(EditSignatures)
通过合并、重新编号和删除类特征来编辑和更新特征文件。
输入特征重映射文件是ASCII文件,其每一行有两列值与之对应,以冒号分隔。第一列是原始类ID值。第二列包含用于在特征文件中更新的新类ID。文件中的所有条目必须基于第一列以升序进行排序。
编辑特征文件的写法是固定的,如下:
只需要编辑的类才必须被放入特征被放入特征重映射文件;任何在重映射文件中不存在的类将保持不变。
要合并一组类,原类ID:新类ID。
要删除一类特征,使用-9999作为该类第二列的值。
要重新编号,将类ID重新编号为某个不存在于输入特征文件中的值。
示例:
2:3
4:11
5:-9999
9:3
上例将使用3合并类2和类9,使用11合并类4,并将删除类5。
1.6 树状图(Dendrogram)
构造可显示特征文件中连续合并类之间的属性距离的树状图。
1.7 最大似然法分类(MaximumLikelihoodClassification)
最大似然法分类工具所用的算法基于两条原则:
1) 每个类样本中的像元在多维空间呈正态分布
2) 贝叶斯决策理论
TIPS:工具中有几个参数需要注意:
reject_fraction:将因最低正确分配概率而得不到分类的像元部分。
默认值为0.0;将对每个像元进行分类。共有14个有效输入:0.0、0.005、0.01、0.025、0.05、0.1、0.25、0.5、0.75、0.9、0.975、0.99和0.995。
a_priori_probabilities:指定将如何确定先验概率。
EQUAL——所有类将具有相同的先验概率。
SAMPLE——先验概率将与特征文件内所有类中采样像元总数的相关的各类的像元数成比例。
FILE——先验概率将会分配给输入的ASCII先验概率文件中的各个类。
1.8 Iso聚类(IsoCluster)
Iso表示:iterativeselt-organizing——迭代自组织方法。
Iso聚类工具对输入波段列表中组合的多元数据执行聚类。所生成的特征文件(*.gsg)可用作生成非监督分类栅格的分类工具(例如最大似然法分类)的输入。
类数的最小有效值为二。不存在最大聚类数。通常情况下,聚类越多,所需的迭代就越多。
1.9 Iso聚类非监督分类(IsoClusterUnsupervisedClassification)
此工具为脚本工具,结合了Iso聚类工具与最大似然法分类工具的功能。输出经过分类的栅格。
1.10 类别概率(ClassProbability)
如果发现分类中的某些区域被分配给某一类的概率不高,则说明可能存在混合类。
例如,根据分类概率波段,一个已被分类为森林的区域属于森林类的概率只有55%。你又发现同一区域属于草地类的概率只有40%。显然,该区域即不属于森林类也不属于草地类。它更可能是一个森林草地混合类。对于使用分类概率工具生成的分类概率,最好检查分类结果。
生成的多波段栅格数城的波段数等于类别数,每个波段表示某种分类的可能概率,像元值从0至100。
1.11 主成分分析(PrincipalComponentsAnalysis)
对一组栅格波段执行主成分分析(PCA)并生成单波段栅格作为输出。此工具生成的波段数与指定的成分烽相同的多波段栅格。
主成分分析工具用于将输入多元属性空间中的输入波段内的数据变换到相对于原始空间对轴进行旋转的新的多元属性空间。新空间中的轴(属性)互不相关。之所以在主成分分析中对数据进行变换,主要是希望通过消除冗余的方式来压缩数据。
2 空间分析之邻域分析
ArcGIS的空间分析扩展中,提供了这样一组邻域分析工具:
原始图像:
2.1 块统计(BlockStatistics)
分块统计,按照指定邻域类型计算区域统计值,输出区域为指定邻域类型的外接矩形。
以下为邻域的形状:
NbrAnnulus({innerRadius},{outerRadius},{CELL|MAP})
NbrCircle({Radius},{CELL|MAP})
NbrRectangel({width},{height},{CELL|MAP})
NbrWedge({innerRadius},{start_angle},{end_angle},{CELL|MAP})
NbrIrregular(kernel_file)
NbrWeight(kernel_file)
Irregular和Weight邻域类型需指定核文件(.txt文件)。
可以进行编码计的计算类型:
MEAN/平均值;MAJORITY/众数(出现次数最多的值);MAXIMUM/最大值;MEDIAN/中数;MINIMUM/最小值;MINORITY/少数(出现次数最少的值);RANGE/范围(最大值和最小值之差)。STD/标准差;SUM/总和。
VARIETY/变异度(唯一值的数量)。
矩形邻域,平均值计算
圆形邻域,平均值计算
2.2 滤波器(Filter)
对栅格执行平滑(低通)滤波器或边缘增强(高通)滤波器。
滤波器工具既可用于消除不必要的数据,也可用于增强数据中不明显的要素的显示。
低通滤波(平滑边界):
高通滤波(边缘增强):
2.3 焦点流(FocalFlow)
焦点流工具使用直接的3*3邻域来确定一个像元的八个相邻点中哪一个流向此像元。焦点流也可以是液体由高到低流动的方向,也可以是定义的任何移动(比如污染物向污染浓度较低的地方流入)。
Thresholdvalue=0
Thresholdvalue=100
2.4 焦点统计(FocalStatistics)
为每个输入像元位置计算其周围指定邻域内的值的统计数据。
统计类型与邻域形状与块统计是相同的,区别在于,块统计的输出是整个邻域的外接矩形范围,而焦点统计的输出,是邻域内焦点栅格。
矩形邻域,平均值计算
圆形邻域,平均值计算
2.5 线统计
用于为每个输出栅格像元周围的圆形邻域内所有线的指定字段值计算统计量。可用的统计量类型有:均值、众数、最大值、中位数、最小值、少数、范围、标准差以及变异度。只有众数、少数和中位数统计量是根据线长度进行加权的。
天津市部分道路中心线做线统计如下:
2.6 点统计
该工具类似于焦点统计工具,不同之处在于它直接对点要素而非栅格进行操作。其优点在于,即使点距离过近,在转换成栅格点时也不会丢失。
3 空间分析之距离分析
与距离分析相关的工具:
ArcGIS中,主要可以通过如下的几种方式进行距离分析:
1. 欧氏距离分析
2. 成本加权距离分析
3. 用于垂直移动限制和水平移动限制的成本加权距离分析
4. 获取最短路径
使用ArcGIS空间分析扩展实现距离分析,最主要的是欧氏距离分析和成本加权距离分析两类工具。
3.1 欧氏距离工具
欧氏距离工具测量每个像元距离最近源的直线距离(像元中心至像元中心的距离)。
欧氏距离(EuclideanDistance)——求得每个像元至最近源的距离。
欧氏方向(EuclideanDirection)——求得每个像元至最近源的方向。
欧氏分配(EuclideanAllocation)——求得每个像元的最近的源。
TIPS:
1. 源(Source)
可以是感兴趣的地物的位置,数据方面,既可以是栅格数据,也可以是矢量数据。但注意:如果数据选用了栅格数据,数据中必须仅包含表示源的像元,其他像元需要是Nodata。如果选用矢量,在执行工具之时,内部会将其先转成栅格。
2. 欧氏距离的算法
简单理解为:工具会求得每个像元至每个源的距离,然后取得每个像元至每个源的最短距离以输出。其中,欧氏距离是像元中心与源像元的中心的直线距离。
3. 欧氏距离输出栅格结果
投影平面上,像元与最近源之间的最短直线距离。
4. 欧氏方向输出栅格结果
像元与最近源之间的方位角方向(以度为单位)。使用360度圆,刻度360指北,90指东,从刻度1顺时针增加。值0供源像元使用。
5. 欧氏分配输出栅格结果
输出的每个像元都是距其最近源的值。
3.2 成本加权距离工具
成本加权距离工具可以看成是对欧氏直线距离的进一步修改,将经过某个像元的距离赋以成本因素。举个简单的例子,翻过一座山到达目的地是最短的直线距离,绕行这座山距离较长,但是更节省时间和体力,那就后者的成本加权距离最短了。
1. 成本距离(CostDistance):求得每个像元至最近源的成本距离。
2. 成本回溯链接(CostBackLink):求的一个方向栅格,可以从任意像元沿最小成本路径返回最近源。
3. 成本分配(CostAllocation):求得每个像元的最近的源。
4. 成本路径(CostPatch):求得任意像元到最近源的最小成本路径。
TIPS:
1. 成本栅格可以是整形或者浮点型,但是其值中不能含有负值或者0。成本栅格中的Nodata视为障碍。
2. 成本距离输出栅格数据
3. 成本距离回溯链接
要注意的是,它并不会要求返回哪一个源像元以及如何返回。而是记录从任意像元回溯到最近源的路径上,每个像元向下一个像元指向的方向,这个方向以0-8的代码形式记录。
Source(0)
Right(1)
Lower-Right(2)
Down(3)
Lower-Left(4)
Left(5)
UpperLeft(6)
Up(7)
Upper-Right(8)
4. 成本距离分配
得到是的每个像元至最近源的成本距离。
3.3 路径距离工具
路径距离工具与成本距离相似,也可以确定从某个源到栅格上各像元位置的最小累积行程成本。但是,路径距离不仅可计算成本表面的累积成本,而且会考虑到行驶的实际曲面距离,和影响到移动总成本的水平和垂直因子。主要包含这几个工具:
1. 路径距离(PathDistance)
2. 路径回溯链接(PathBackLink)
3. 路径分配(PathAllocation)
3.4 获得最短路径
1. 成本距离路径
任意像元到最近源的最小成本路径,需要引用到上面工具中生成的成本距离和成本回溯链接栅格数据。
2. 廓道(Corridor)
用于计算两个成本栅格的累积成本栅格结果,为了求得从一个源到另一个源且经过该像元位置的最小成本路径。
输出栅格不是单个最小成本路径,但会得到源之间累积成本的范围。
最后我们可以配合其他工具将小于某一阈值的结果提取出来,例如工具ExtractbyAttribute提取,或者通过Con进行条件赋值等等方法,获取结果。
4 空间分析之水文分析
接收雨水的区域以及雨水到达出水口前所流经的网络被称为水系。流经水系的水流只是通常所说的水文循环的一个子集,水文循环还包括降雨、蒸发和地下水流。水文分析工具重点处理的是水在地表上的运动情况。“水文分析”工具用于为地表水流建立模型。
盆域分析(Basin):创建描绘所有流域盆地的栅格。
填洼(Fill):通过填充表面栅格中的汇来移除数据中的小缺陷。
流量(FlowAccumulation):创建每个像元累积流量的栅格。可选择性应用权重系数。
流向(FlowDirection):创建从每个像元到其最陡下坡相邻点的流向的栅格。
水流长度(Flowlength):计算沿每个像元的流路径的上游(或下游)距离或加权距离。
汇(Sink):创建识别所有汇或内流水系区域的栅格。
捕捉倾泻点(SnapPourPoint):将倾泻点捕捉到指定范围内累积流量最大的像元。
河流连接(StreamLink):向各交汇点之间的栅格线状网络的各部分分配唯一值。
河网分级(StreamOrder):为表示线状网络分支的栅格线段指定数值顺序。
栅格河网矢量化(StreamtoFeature):将表示线状网络的栅格转换为表示线状网络的要素。
分水岭(Watershed):确定栅格中一组像元之上的汇流区域。
以下图DEM为例:
4.1 流向(FlowDirection)
流向工具的输出是值范围介于1到255之间的整型栅格,从中心出发的各个方向值为:
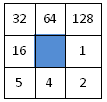
例如,如果最陡下降方向位于当前处理像元的左侧,则该处理像元的流向编码将为16。
如果像元的Z值在多个方向上均发生相同变化,并且该像元是凹陷点的一部分,则该像元的流向将被视为未定义。此时,该像元在输出流向栅格中的值将为这些方向的总和。
例如,如果z值向右(流向=1)和向下(流向=4)的变化相同,则该像元的流向为1+4=5。
可以使用汇工具将具有未定义流向的像元标记为凹陷点。
4.2 汇(Sink)
汇是指流向栅格中流向元法被赋予八个有效值之一的一个或一组空间连接像元。汇被视为具有未定义的流向,并被赋予等于其可能方向总和的值。
汇工具的输出是一个整型栅格,其中每个汇都被赋予一个唯一值。汇的编号介于1到汇的数量之间。
4.3 填洼(Fill)
通过表面栅格中的汇来移除数据中的小缺陷。
凹陷点是指具有未定义流域方向的像元;其周围的像元均高于它。倾泻点相对于凹陷点的汇流区域高程最低的边界像元。如果凹陷点中充满了水,则水将从该点倾泻出去。
TIPS:有关填充的Z限制
要填充的凹陷点与其倾泻点之间的最大高程差。如果把凹陷点与其倾泻点之间的Z值差大于Z限制,则不会填充此凹陷点。
默认情况下将填充所有凹陷点(不考虑深度)。
4.4 流量(FlowAccumulation)
创建每个像元累积流量的栅格。流量累积将基于流入输出栅格中的每个像元的像元数。
高流量的输出像元是集中流动区域,可用于标识河道。流量为零的输出像元是局部地形高点,可用于识别山脊。
流量工具不遵循压缩环境设置。输出栅格将始终处于未压缩状态。
4.5 河流分级(StreamOrder)
河流分级是一种将级别数分配给河流网络中的连接线的方法。此级别是一种根据支流数对河流类型进行识别和分类的方法。仅需知道河流的级别,即可推断出河流的某些特征。
河流分级工具有两种用于分配级别的方法。这两种方法由Strahler(1957)和Shreve(1966)提出。在这两种方法中,始终将1级分配给上游河段。
Strahler河流分级方法:
在Strahler法中,所有没有支流的连接线都被分为1级,它们称为第一级别。当级别相同的河流交汇时,河网分级将升高。
因此,两条一级连接线相交会创建一务二级连接线,两条二级连接线相交会创建一条三级连接线,依此类推。但是,级别不同的两条连接线相交不会使级别升高。例如,一条一级连接线和一条二级连接线相交不会创建一条三级连接线,但会保留高级连接线的级别。
Shreve河流分级方法:
Shreve法考虑网络中所有连接线。所有外连接线都被分为1级。但对于内连接线,级别是增加的。例如,两条一级连接线相交会创建一条二级连接线,一条一级连接线和一条二级连接线相交会创建一条三级连接线,而一条二级连接线和一条三级连接线会创建一条五级连接线。
因为级别可增加,所以Shreve法中的数字有时指的是量级,而不是级别。连接线的量级是指上游连接线的数量。
4.6 栅格河网矢量化(StreamtoFeature)
栅格河网矢量化工具使用的算法主要用于矢量化河流网络或任何表示方向已知的栅格线性网络的栅格。
该工具使用方向栅格来帮助矢量化相交像元和相邻像元。可将两个值相同的相邻栅格河网矢量化为两条平行线。
这与栅格转折线(RastertoPolyline)工具相反,后者通常更倾向于将线折叠在一起。
4.7 河流连接(StreamLink)
向各交汇点之间的栅格线状网络的各部分分配唯一值。
“连接”是指连接两个相邻交汇点,连接一个交汇点和出水口或连接一个交汇点和分水岭的河道的河段。
4.8 水流长度(FlowLength)
水流长度工具的主要用途是计算给定盆地内最长水流的长度。该度量值常用于计算盆地的聚集时间。这可使用UPSTREAM选项来完成。
该工具也可通过将权重栅格用作下坡运动的阻抗,来创建假设降雨和径流事件的距离-面积图。
4.9 捕捉倾泻点(SnappourPoint)
该工具用于确保在使用分水岭工具描绘流域盆地时选择累积量大的点。
捕捉倾泻点将在指定倾泻点周围的捕捉距离范围内搜索累积流量最大的像元,然后将倾泻点移动到该位置。
4.10 分水岭(Watershed)
确定栅格中一组像元之上的汇流区域。
4.11 盆域
创建描绘所有流域盆地的栅格。
通过识别盆地间的山脊线,在分析窗口描绘流域盆地。
通过分析输入流向栅格数据找出属于同一流域盆地的所有已连接像元组。
通过定位窗口边缘的倾泻点(水将从栅格倾泻出的地方)及凹陷点,然后再识别每个倾泻点上的汇流区域,来创建流域盆地,这样就得到流域盆地的栅格。
5 空间分析之表面分析
我们可以利用“表面分析(Surface)”工具量化及可视化地形地貌。
坡向(Aspect):获得栅格表面的坡向。示得每个像元到其相邻像元方向像元值的变化率最大的下坡方向。
等值线(Contour):根据栅格表面创建等值线(等值线图)的线要素类。
等值线序列(ContourList):根据栅格表面创建所选等值线值的要素类。
含障碍的等值线(ContourwithBarriers):根据栅格表面创建等值线。如果包含障碍要素,则允许在障碍两侧独立生成等值线。
曲率(Curvature):计算栅格表面的曲率,包括剖面曲率和平面曲率。
填挖方(CutFill):计算两表面间体积的变化,常执行填挖操作。
山体阴影(HillShade):通过考虑照明源的角度和阴影,根据表面栅格创建地貌晕渲。
视点分析(ObserverPoint):识别从各栅格表面位置进行观察时可见的观察点。
坡度(Slope):判断栅格表面的各像元中的坡度(梯度或z值的最大变化率)。
视域(Viewshed):确定对一组观察点要素可见的栅格表面位置。
以下图DEM为例:
5.1 各种等值线工具
1. 等值线(Contour)
2. 等值线列表(ContourList)
可以指定等值线的值,如只输出196,188的等值线
3. 含障碍的等值线(ContourwithBarriers):
根据栅格表面创建等值线。如果包含障碍要素,则允许在障碍两侧独立生成等值线。
TIPS:关于等值线的质量问题
少数情况下,所创建等值线的轮廓可能会呈方形或不均匀,看起来犹如沿着栅格像元的边界。出现这种情况可能是因为各栅格的值为整数且恰好落在等值线上。这并不是问题,该等值线不过是原样呈现数据而已。
如果希望等值线更平滑,可行的方法包括对源数据进行平滑处理或调整起始等值线。
5.2 表面特征相关工具
1. 坡向(Aspect)
此工具求得每个像元到其相邻的各个像元方向的z值上变化率最大的下坡方向。
从概念上讲,坡向工具将根据要处理的像元或中心像元周围一个3*3的像元邻域的z值拟合出一个平面。该平面的朝向就是待处理像元的坡向。
输出栅格的值将是坡向的罗盘方向。坡向由0到359.9度之间的正度数表示,以北为基准方向按顺时针进行测量。会为输入栅格中的平坦(具有零坡度)像元分配-1坡向。
2. 坡度(Slope)
3. 曲率(Curvature)
5.3 填挖方(CutFill)
计算两表面间体积的变化。
默认情况下,将使用专用渲染器来高亮显示执行填挖操作的位置。该渲染器将被挖的区域绘制成蓝色,将被填的区域绘制成红色。没有变化的区域将显示为灰色。
5.4 山影(HillShade)
此工具考虑的主要因素是太阳(照明源)在天空中的位置。
方位角(Azimuth)指的是太阳的角度方向,是以北为基准方向在0到360度范围内按顺时针进行测量的。90度的方位角为东。此工具默认的方位角为315(NW)。
高度(Altitude)指的是太阳高出地平线的角度或坡度。高度的单位为度,范围为0(位于地平线)到90(位于头顶)之间。此工具默认的高度为45度。
Modelshadows:勾选,可计算局部照明度以及像元是否落入阴影内。阴影值为0,所有其他像元的编码介于1和255之间。
Z因子(Zfactor):Z单位与输入表面的X,Y单位不同时,可使用Z因子调整Z单位的测量单位。计算最终输出表面时,将用Z因子乘以输入表面的Z值。
如果X,Y单位和Z单位采用相同的测量单位;则Z因子为1。这是默认值。
此外,Z因子还可用于地形夸大。
例如:Z单位是英尺,而X,Y单位是米,则Z因子为0.3048,将Z单位从英尺转换为米(1英尺=0.3048米)
5.5 可见性分析
1. 视点分析
视点工具仅支持点要素输入,而且观察点最多可达16个。
可见性信息存储在VALUE字段中,如果要显示通过视点3能看到的所有栅格区域,就打开输出栅格属性表,然后选择视点3(OBS3)等于1而其它视点等0的记录。
0为不可见,1为可见。
2. 视域
视域工具公创建一个栅格数据,以记录可从输入视点或视点折线要素位置看到每个区域的次数。该值记录在输出栅格表的VALUE项中。
TIPS:控制可见性分析
通过在要素属性数据集中指定不同的项,可限制所检查的栅格区域,共九项:SPOT、OFFSETA、OFFSETB、AZIMUTH1、AZIMUTH2、VERT1、VERT2、RADIUS1和RADIUS2。
6 空间分析之区域分析
空间分析扩展中,有关区域分析,提供了如下工具:
6.1 确定区域中类的面积的工具
面积制表(TabulateArea)
该工具以表的形式进行输出,在此表中:
1. 区域数据集的每个唯一值均有一条记录。
2. 类数据集的每个唯一值均有一个字段。
3. 每个记录将存储每个区域内每个类的面积。
6.2 填充指定区域的工具
区域填充(ZonalFill)
输入区域栅格数据可以为整型或浮点型,使用权重栅格数据沿区域边界的最小像元值填充区域。区域填充可用作水文分析的一部分,将洼地填充至分水岭边界的最小高程。
6.3 作用于区域形状的工具
分区几何统计(ZonalGeometry)
这里说的区域是指具有相同值的所有像元。各区无需相连。栅格和要素数据集都可用于工具的输入。
这个工具的亮点在于可以统计区的总面积(Area)、总周长(Perimeter)、厚度(Thickness)、质心(Centroid)。
分区厚度分析可计算输入栅格上各个区域中最深或最厚点距其周围像元的距离。
实际上,厚度就是可在各个区域中(不包括区域外部的任何像元)绘制的最大圆的半径(以像元为单位)。
以表格显示分区几何统计(ZonalGeometryasTable)
6.4 确定某输入栅格值在另一区域中的频数分布的工具
区域直方图(ZonalHistogram)
创建显示各唯一区域值输入中的像元值频数分布的表和直方图(Graph类型)。
字段必须为整型或字符串类型。
6.5 作用于区域属性的工具
分区统计(ZonalStatistics)
以表格显示分区统计(ZonalStatisticsasTable)
这两个工具,计算在别一个数据集的区域内栅格数据值的统计信息。这里的区域定义为输入中具有相同值的所有区。
各区无需相连。
栅格和要素集都可用于区域输入。
前者生成栅格数据,后者生成统计表。
文章内容来自百度文库,向原作者致谢,仅供学习交流之用!



















 5074
5074

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









