







Autonomous vehicle 杂谈_05
一. 写在前面
很久之前博主有写过一篇 Python实现三维世界坐标向二维像素坐标的转换(附源码) 的博文,但在最近重新研究过后,发现计算过程中确实有些纰漏,为了提醒自己,博主决定重新整理一下。
二. 使用Autoware获取自己的LiDAR&Camera校准结果
这里不加赘述,详细步骤可参考以下博文:
无人驾驶汽车系统入门(二十二)——使用Autoware实践激光雷达与摄像机组合标定
这篇文章写得很清晰,大家按照这个博文细心仔细地一步步来,一定是没有问题的。
三. 安装所需功能包:
- 打开你的终端,安装过程紧跟博主的操作,前提是你在电脑上已经安装了Anaconda3。
1| conda create --name Open3D python=3.8 # 创建Open3D环境
2| conda activate Open3D # 激活环境
3| conda install numpy # 安装numpy
4| conda install matplotlib # 安装matplotlib
5| conda install opencv # 安装opencv
6| conda install -c open3d-admin open3d # 安装Open3D
- 检验是否安装成功(在终端依次输入以下内容)
1| python
2| import open3d
如果不报错,则证明安装成功。
四. 处理你所获得的标定结果
正常情况下你会得到一个像这样的标定结果:
%YAML:1.0
---
// 相机外参矩阵
CameraExtrinsicMat: !!opencv-matrix
rows: 4
cols: 4
dt: d
data: [ 6.4384993725688400e-02, -2.9614494224688315e-02,
9.9748561609416664e-01, 7.0567131528775830e-03,
-9.9779108558785690e-01, -1.8293328335903247e-02,
6.3861597692206229e-02, 6.9659648287774212e-02,
1.6356102969515951e-02, -9.9939398430759574e-01,
-3.0726894171716257e-02, 7.3964965903196039e-02, 0., 0., 0., 1. ]
// 相机内参矩阵
CameraMat: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [ 6.0094877060462500e+02, 0., 3.0507696130640221e+02, 0.,
6.1174212550675293e+02, 2.5274596287337977e+02, 0., 0., 1. ]
// 相机形变矩阵
DistCoeff: !!opencv-matrix
rows: 1
cols: 5
dt: d
data: [ 2.3030430710414049e-01, -9.1560321189489913e-01,
1.0374975865423207e-02, -8.9662215743119679e-04,
1.3506515085650497e+00 ]
// 做校准所用图片的分辨率
ImageSize: [ 640, 480 ]
// 重投影精度
ReprojectionError: 4.4973948452563883e-01
但是使用Autoware所获取的标定结果是不能直接使用的,你需要对其进行一定的处理!具体处理方法如下所示!
1. 对于相机外参矩阵中的旋转矩阵:首先你要对该矩阵进行转置处理,之后再进行罗德里格斯变换
2. 对于相机外参矩阵中的平移矩阵:你需要做一些换位处理
t_true[0] = -t[2]
t_true[1] = t[0]
t_true[2] = t[1]
3. 对于相机内参矩阵和相机形变矩阵则不需要做任何改变
废话不多说,直接上代码:
import cv2
import numpy as np
# 原始旋转矩阵
R = np.float64([[6.4384993725688400e-02, -2.9614494224688315e-02, 9.9748561609416664e-01],
[-9.9779108558785690e-01, -1.8293328335903247e-02, 6.3861597692206229e-02],
[1.6356102969515951e-02, -9.9939398430759574e-01, -3.0726894171716257e-02]])
# 先做个转置
RT = np.transpose(R)
print(RT)
# 再求罗德里德斯变换
rvec = cv2.Rodrigues(RT)[0]
print(rvec)
# 结果
# [[ 1.27379905]
# [-1.17541056]
# [ 1.15989273]]
# 原始平移矩阵
t = np.mat([
[7.0567131528775830e-03],
[6.9659648287774212e-02],
[7.3964965903196039e-02]
])
# 换位
t_true = np.float64([
[-t[2]],
[t[0]],
[t[1]]
])
print(t_true)
# 得到的真实平移向量
# [[-0.07396497],
# [0.00705671],
# [0.06965965]]
五. 文件夹构造
六. 点云重投影(世界坐标转换为像素坐标)
步骤说明:
- 使用open3d功能包中的函数,从 .pcd 文件中读取出激光雷达点云坐标
- 声明各种内外参矩阵
- 使用opencv功能包中的函数,进行世界坐标向像素坐标的转换
- 点云重投影
废话不多说,直接上代码:
#-*- coding:utf-8 -*-
"""使用获取的相机内外参数实现重投影"""
import open3d as o3d
import cv2
from PIL import Image
from pylab import *
import matplotlib.pyplot as plt
# 读取pcd点云文件,保存为array数组
cloud = o3d.io.read_point_cloud('1.pcd') # 需要准备自己的pcd文件
cloud = np.asarray(cloud.points) # 改变点云的数据类型
# 输入 projectpoints 函数的各项参数数值
# 经过矩阵转置,以及罗德里格斯变换得到的旋转矩阵
rvec = np.float64([1.27379905, -1.17541056, 1.15989273])
# 经过排序修改后得到的平移矩阵
tvec = np.float64([-0.07396497, 0.00705671, 0.06965965])
# 相机内部参数
camera_matrix = np.float64([[6.0094877060462500e+02, 0, 3.0507696130640221e+02],
[0, 6.1174212550675293e+02, 2.5274596287337977e+02],
[0, 0, 1]]) # 相机内部参数
# 相机形变矩阵
distCoeffs = np.float64([2.3030430710414049e-01, -9.1560321189489913e-01,
1.0374975865423207e-02, -8.9662215743119679e-04, 1.3506515085650497e+00])
# 进行点云由3D到2D的转换
point_2d, _ = cv2.projectPoints(cloud, rvec, tvec, camera_matrix, distCoeffs)
print(point_2d)
# 重投影绘制在图像上
im = Image.open('1.jpg')
x = []
y = []
m = -1
for point in point_2d:
m = m+1
x_2d = point[0][0]
y_2d = point[0][1]
if 0 <= x_2d <= 640 and 0 <= y_2d <= 480:
x.append(x_2d)
y.append(y_2d)
x = np.array(x)
y = np.array(y)
plt.scatter(x, y, s=1)
plt.imshow(im)
plt.show()
七. 结果展示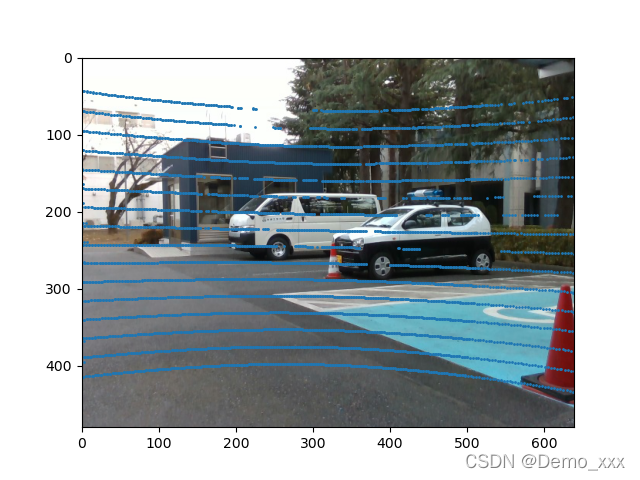
八. 感悟与分享
- 学会如何处理从Autoware获取的标定结果十分重要。
- 点云还携带距离信息,这个距离信息可以发挥出意想不到的作用。
- 坐标转换过程,还是直接cv2.projectPoints来的更准确些。














 788
788











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









