






1.点云可视化工具
1.1 cloudcompare下载安装
sudo snap install cloudcompare启动方法:
#open pointcloud viewer
cloudcompare.ccViewer
#open the main software
cloudcompare.CloudCompare使用上述第一条命令,读取的点云某一帧数据,我的点云格式为txt(单帧)。如下

此外,cloudcompare还支持的格式:pcd等等.
另外,cloudcompare不支持读取bin格式的文件(KITTI 的点云数据就是这种格式)。需要先把bin转换为其他格式。
1.2 ROS-rviz
ROS-rviz工具可以从rosbag数据中读数据。

1.3 PCL
使用pcl_viewer可以读取pcd点云文件,安装方法如下
sudo apt-get install pcl-tools
#使用方法
pcl_viewer xxx.pcd
1.4 Open3D
以下是Open3D读取的点云,可视化的结果。我安装的是python版本的Open3D,安装方式如下
pip install open3d -i https://pypi.tuna.tsinghua.edu.cn/simple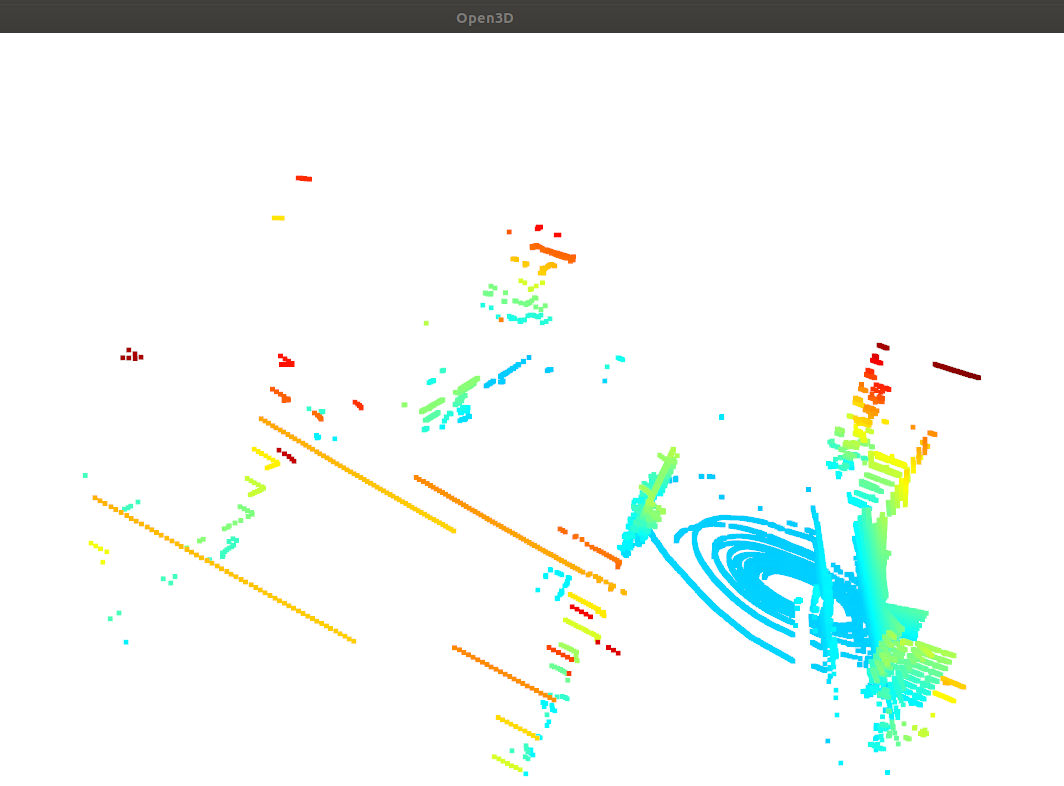
1.5 Meshlab

2.点云数据格式转换
点云最常用的数据格式就是rosbag(多帧), 以及通过 Wireshark 抓取的pcap包(多帧)。
单帧的数据格式有txt,pcd, bin。
2.1 如何读取并可视化pcap包中的点云数据-PCL方式
这篇博客讲述了用PCL库读取并可视化pcap点云数据。
用PCL直接读取并显示PCAP文件_pcl读pcap点云文件_captainzx的博客-CSDN博客
2.2 如何读取并可视化pcap包中的点云数据-速腾SDK方式
略
2.3如何将pcap包中的点云数据转化为rosbag。
略
2.4 如何从多帧的rosbag数据中,截取单帧的点云数据。基于python语言实现
rosbag->txt;
txt->pcd; pcd->txt;
txt->bin; bin->txt;
bin->pcd; pcd->bin;
本人已实现以上方法,如需要,请私信联系!
3.点云标注工具labelcloud
#下载labelcloud工具包
git clone https://github.com/ch-sa/labelCloud.git
# conda创建labelcloud所需要的环境,确保已经安装了anaconda
conda create -n labelcloud3.8 python=3.8 -y
#进入环境中
conda activate labelcloud3.8
#进入下载下来的labelCloud路径下
cd ./labelCloud
#安装依赖
pip install -r requirements.txt
#启用软件
python labelCloud.py打开之后,呈现如下的界面
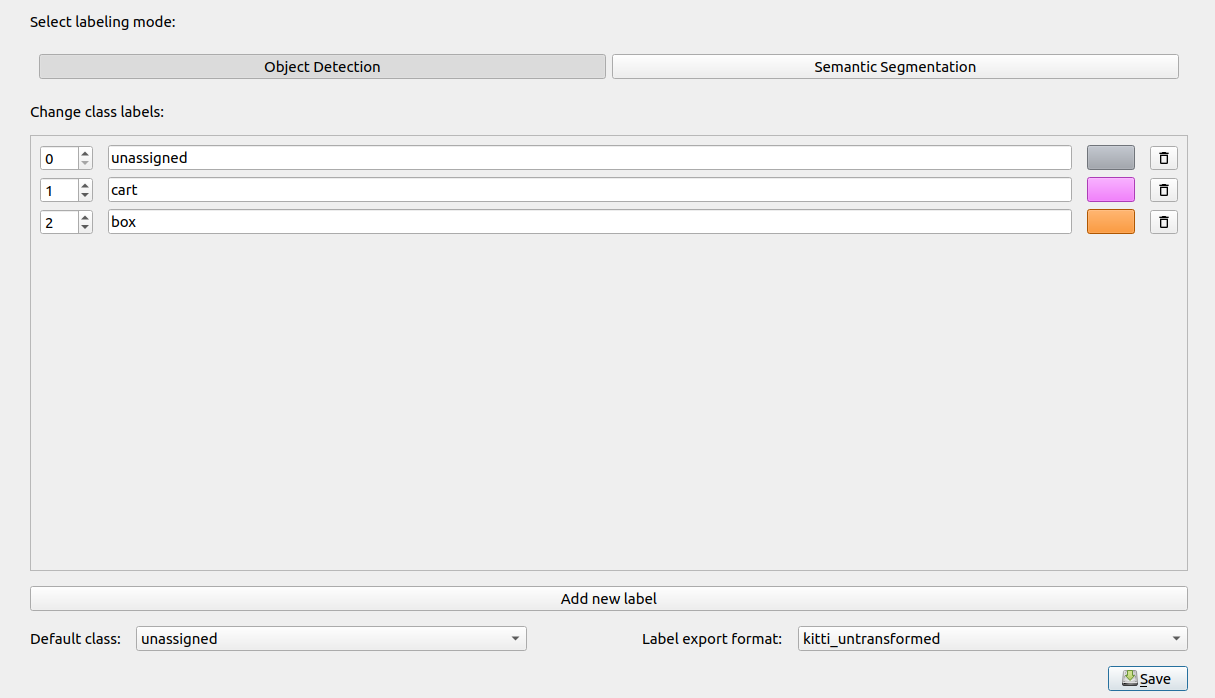
在这个界面上,可以设置类别信息。以及标签的格式,比如选择kitti。不设置也没关系,在后面的GUI界面中还可以再设置。选择save之后,会跳出新的界面。
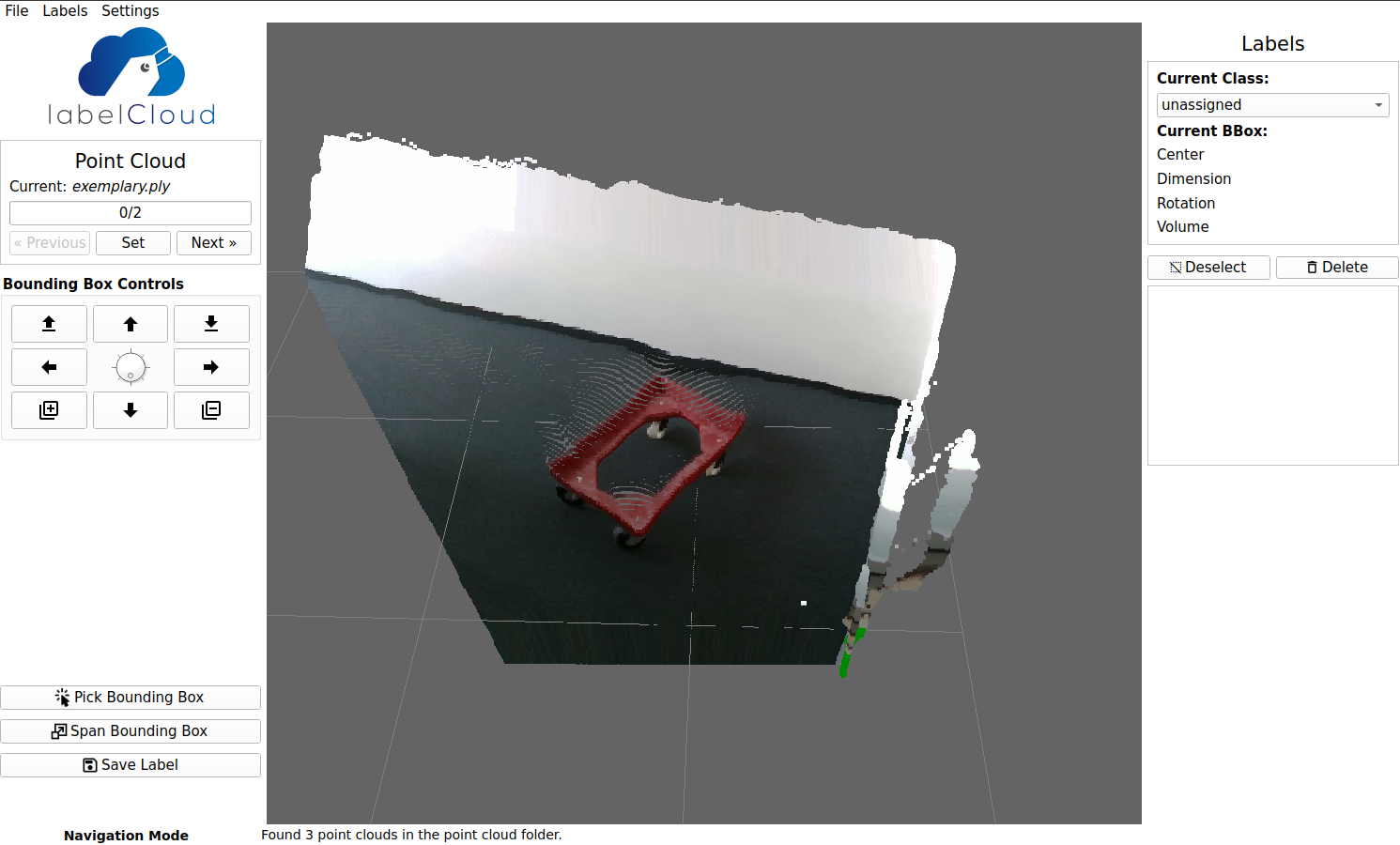
菜单栏Setting->Change setting可以设置标签的格式等内容;
左下角Pick Bouding Box,点击后会出现新的3D长方体,这个是默认的框。可以在Setting选项里设置默认框的长宽高;
鼠标左键可以选中框;
左侧中间的Bouding Box Controls可以平移框,上下前后左右;“+”按钮等比例放大框;同理“-”按钮等比例缩小框;
快捷键:
QWE ASD 这6个字母,代表上下前后左右,具体哪个对应哪个用户自己试一下;
ZX可以旋转框,一个是顺时针,另外一个是逆时针;如果标注的是车辆数据,注意框内部有一个绿色的箭头,箭头指向需要和车头朝向一致。
小技巧:
鼠标左键可以选择框的单一某个面,然后鼠标滚轮滚动可以调节这个面,在法向方向上移动;相当于可以在某一个方向上调整框的大小。
数据集的摆放位置:
./labelCloud/pointclouds 里面放的是点云数据(支持ply,bin格式)
./labelCloud/labels 里面放的是标签。用户可以提前了解一下kitti数据集3D点云检测的数据格式。















 3万+
3万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









