







[ACFLy全新开源飞控–先知系列] 欢迎转载
一、飞控介绍
ACFly Prophet先知系列是ACFLy源飞控的第二款飞控,第一款飞控是专为电赛所生的TI飞控(具体可看下面链接),相信了解过或使用过我们飞控的朋友都知道我们是靠实力说话的,飞控定位为:超快速二次开发飞控(几乎不用调参,二次开发贼快),代码原创率达到99.9%,目前适用机型:多旋翼(4、6、8轴 包括x8等)。那这款新飞控有什么特别之处呢,别急,先上波图让大家了解一下~~
可以加Q群180319060了解哦。
TI飞控介绍:TI飞控介绍
有兴趣的朋友可关注某宝店:某宝链接(不要脸.jpg)
相关视频:飞控视频



二、飞控硬件
这款飞控不仅颜值爆表,性能更是提升了不只一个等级,下面给大家介绍一下硬件方面有哪些亮点。
1. 主控芯片:stm32h743vit6, 主频高达480M,L1级缓存Cache:16Kbytes,1M内存,2M Flash,支持硬件双精度浮点运算。
2. IMU芯片:加速度计和陀螺仪:超抗震的BMI088(专为旋翼无人机而生),磁力计:AK8975,气压计:SPL06,IMU接口支持SPI和IIC,现IMU使用SPI。
3. 板载8M Byte Flash芯片
4. 接口:
*1路USB接口
*支持PPM,SBUS接收机接口
*TF卡接口
*5路串口
*2路IIC接口
*1路屏幕SPI接口和IMUSPI接口
*1路CAN接口
*1路超声波接口
*8路PWM输出接口
*电压电流ADC接口
*1路程序下载口
*板载三色OLED蜂鸣器和可充电纽扣电池(RTC实时时钟功能)
5.IMU分离、恒温控制设计。
6.飞控装上外壳后长5.5cm,宽4.4cm,高1.9cm,重量忽略。

三、飞控软件
这次飞控代码上了FreeRTOS操作系统、文件系统,更易于飞控的二次开发。
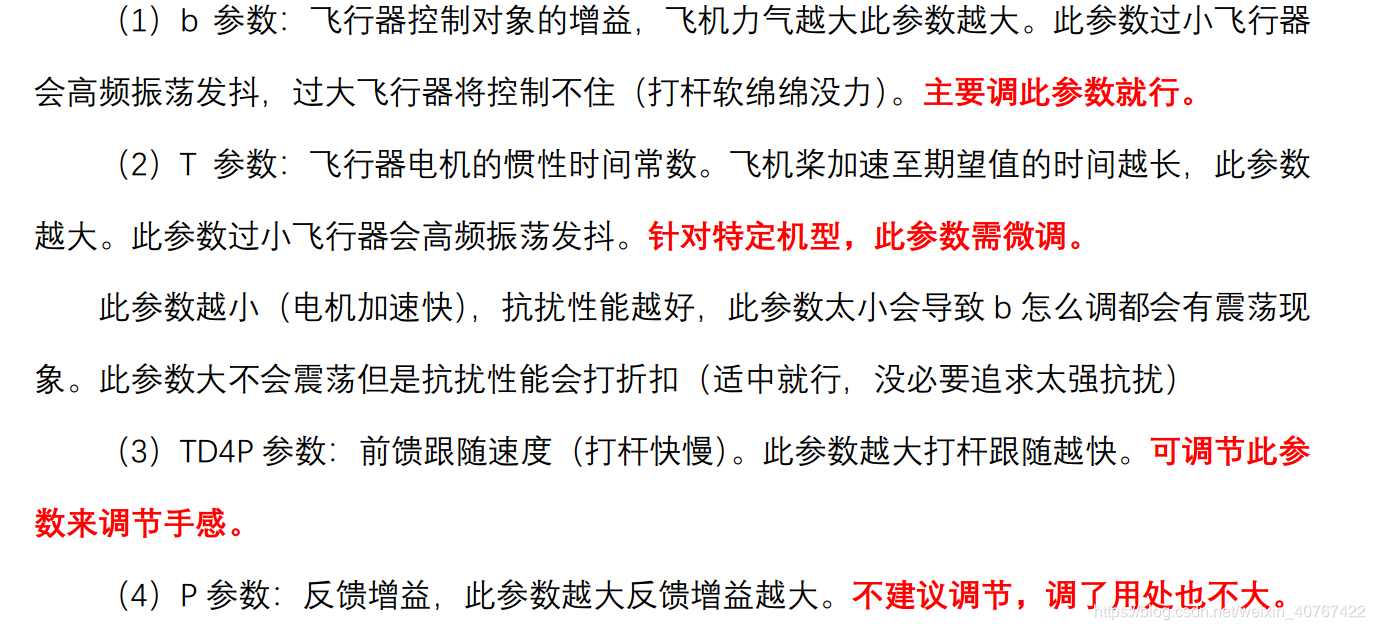
1、单参数对模型自抗扰控制器,不同机型只调一个参数就能稳飞,真正做到小白也会调参。
2、传感器健康度检测,实时智能检测气压、超声波、gps等传感器是否健康,并进行智能融合,解决目前开源飞控普遍存在的风吹、斜飞掉高,超声波挂掉射天花板问题。

3、超快速飞行控制二次开发。
4、超快速传感器二次开发。
5、飞控用到的算法
5.1、姿态控制
姿态使用对模型的自抗扰控制器,包含ESO和反步控制器。
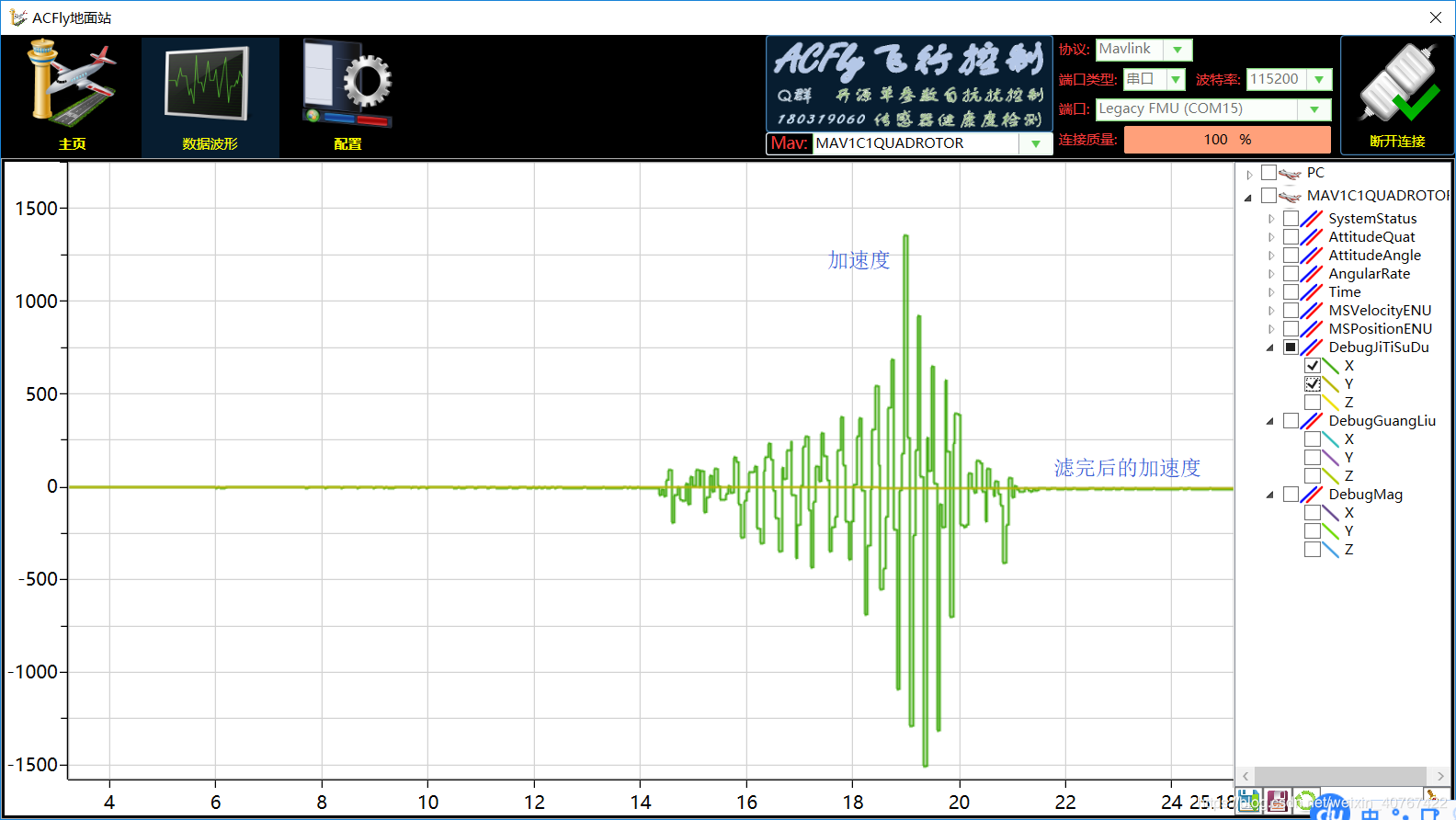
ESO可以在陀螺大中低频噪声环境下(低通滤波器滤不掉)获得十分低噪的角加速度信息;同时能相位超前,将传感器及低通滤波器造成的延时给补偿回来!看图:
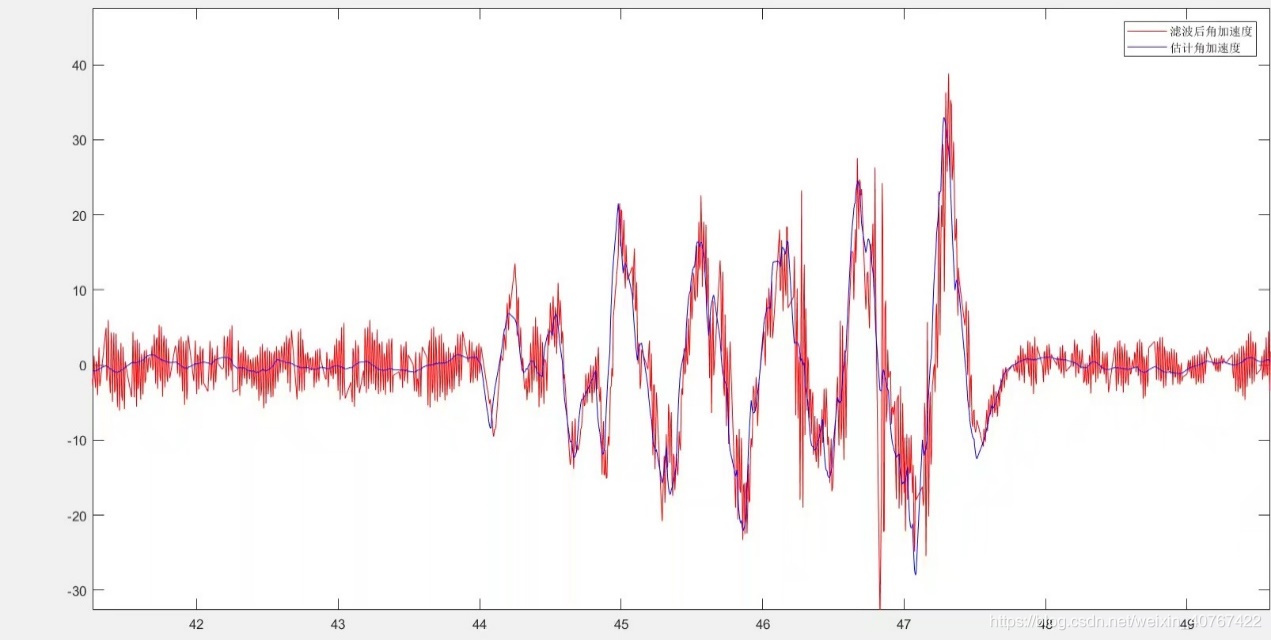
因此飞行器即使震动剧烈也能飞行十分平稳!不会出现近地面发抖的情况,解决了传统pid控制器下某些大桨低转速机子低频振动过大怎么调都飞不好的问题。
5.2、高度控制
高度控制使用自适应悬停油门观测器和对模型控制,反应速度非常快,并且没有基础油门!也就是说,高度控制器完全没有参数!完全不用调!且抗扰能力极强哦。
5.3姿态解算
姿态解算采用了一个等效截止频率低于0.05hz的加速度非线性滤波器,可以在无gps(或者其它xyz轴速度传感器)环境下,极大地抑制运动加速度(加速度噪声就不用说啦,0.05hz下是一点都不存在了)。在有gps(或者其它xyz轴速度传感器)环境下,可以补偿运动加速度。也得益于这个超低频滤波器,gps引入的低频噪声荡然无存,解决了开源飞控普遍存在的补偿运动加速度后姿态振动加剧的问题!
同时,在有gps(或者其它xy轴速度传感器)环境下,飞控可以估计出磁偏角(或者在无罗盘可用情况下直接用gps修正),从而达到动态修正磁偏角的目的。(动态磁罗盘校准也有哦)
5.4位置解算
位置解算就是前面二所说的健康度检测智能融合算法啦。

















 2764
2764

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









