







结构光与双目视觉
2D与3D的关系
现实存在的问题
1.一般的物体(Objects)都是三维的;
2.图像(Images)确实有关灰度,颜色等信息的阵列;
3.3D 的深度(Depth)信息在一幅图像上不能明显的显示出来。
2D 的分析需要 3D 的信息
1.物体表面是连续,平滑(Smooth)的;
2.物体都有特定的形状和边界。
3D 的信息可以通过 2D 的图像计算出来
视差(Disparity),深度(Depth)信息等等;
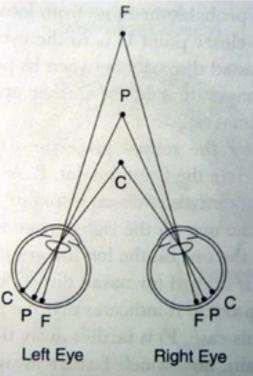
为什么需要两个眼睛?
物体的深度信息可以通过双眼的观察得到
亚像素(Sub-pixel)
在某些对精度要求较高的场合,需要对视差进一步精细化(Refinement),亚像素是其中一种方法。

d = (S(-1)-S(1))/2(S(1)+S(-1)-2S(0))
立体视觉(Stereo Vision)
由两幅或多幅从不同视点拍摄的图像恢复场景三维信息的技术
两个主要的子问题
匹配问题 -> 视差图(Disparity Space Image)
相似而不是相同
遮挡问题:场景的某些部分只能在一幅图像中可见
重建问题 ->3D</
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 2359
2359











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









