







双目结构光系统
如上图所示:
:就是带有一定结构的,而且我们自己是知道光源的这种结构的。
结构光三维视觉也是基于光学三角测量原理。光学投射器将一定模式的结构光透射于物体表面,在表面上形成由被测物体表面形状所调制的光条三维图像。
该三维图像由处于另一位置的摄像机探测,从而获得光条二维畸变图像。光条的畸变程度取决于光学投射器与摄像机之间的相对位置和物体表面形状轮廓(高度)。
直观上,沿着光条显示出的位移(或者偏移)与物体表面高度成比例,扭结表示了平面的变化,不连续显示了表面的物理间隙。当光学投射器与摄像机之间的相对位置一定时,由畸变的二维光条图像坐标便可重现物体表面三维形状轮廓。由光学投射器、摄像机、计算机系统即构成了结构光三维视觉系统。
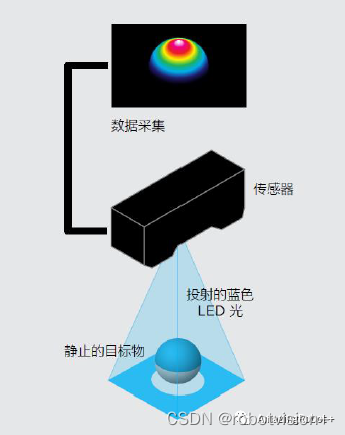
结构光(Structured light):通常采用特定波长的不可见的红外激光作为光源,它发射出来的光经过一定的编码投影在物体上,通过一定算法来计算返回的编码图案的畸变来得到物体的位置和深度信息。根据编码图案不同一般有条纹结构光—enshape ,编码结构光—Mantis Vision, Realsense(F200), 散斑结构光–apple(primesense)
特定波长的Laser 发出的结构光照射在物体表面,其反射的光线被带滤波的camera 相机接收,滤波片保证只有该波长的光线能为camera 所接受。芯片对接收到的光斑图像进行运算,得出物体的深度数据。
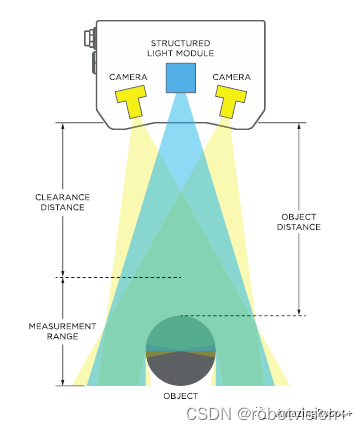
如上图所示:双目结构光系统
相位法:近年来基于相位的光栅投影三维轮廓测童技术有了很大的发展,将光栅图案投射到被测物表面,受物体高度的调制,光栅条纹发生形变,这种变形条纹可解释为相位和振幅均被调制的空间载波信号。采集变形条纹并且对其进行解调可以得到包含高度信息的相位变化,
最后根据三角法原理计算出高度,这类方法又称为相位法。基于相位测量的三维轮廓测量技术的理论依据也是光学三角法,但与光学三角法的轮廓术有所不同,它不直接去寻找和判断由于物体高度变动后的像点,而是通过相位测量间接地实现,由于相位信息的参与,使得这类方法与单纯光学三角法有很大区别。

飞行时间法ToF
如上图所示:飞行时间法ToF
飞行时间是从Time of Flight直译过来的,简称TOF。其基本原理是通过连续发射光脉冲(一般为不可见光)到被观测物体上,然后用传感器接收从物体返回的光,通过探测光脉冲的飞行(往返)时间来得到目标物距离。
TOF法根据调制方法的不同,一般可以分为两种:脉冲调制(Pulsed Modulation)和连续波调制(Continuous Wave Modulation)。
TOF深度相机对时间测量的精度要求较高,即使采用最高精度的电子元器件,也很难达到毫米级的精度。因此,在近距离测量领域,尤其是1m范围内,TOF深度相机的精度与其他深度相机相比还具有较大的差距,这限制它在近距离高精度领域的应用。
















 2359
2359











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











