






Score Type
1.Harris corner score
2.The sum of the absolute differences
3.Fast Score
Harris Corner Score
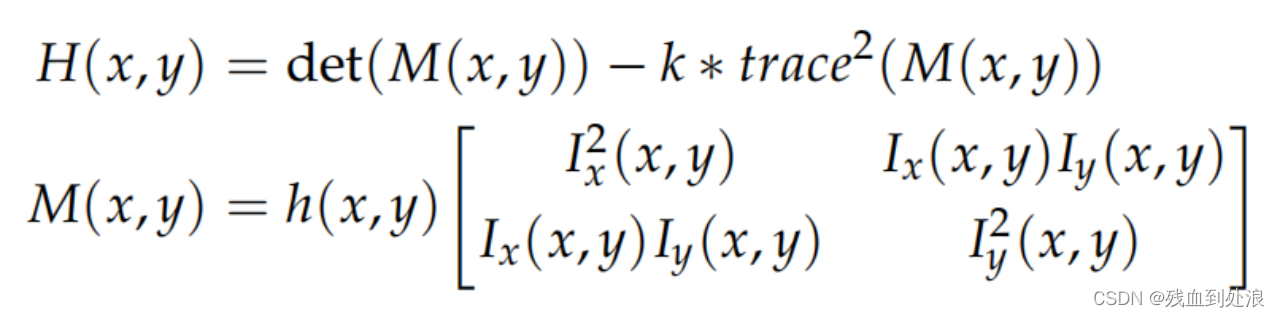
where det is the matrix determinant, trace is the matrix trace, k is the constant value, k ∈ [0.04; 0.06], (x, y) are the image coordinates, h(x, y) is the Gaussian function, M(x, y) is the autocorrelation matrix, Ix(x, y), Iy(x, y) are the spatial derivatives.
Sum of Absolute Differences

where x ∈ {1, . . . , 16} on the circle, S_bright pixels greater than or equal to Ip + t,S_dark pixels less than or equal to Ip − t ,t is the threshold .
方案一:

使用加法器结构。例如,“b”和“ai”之间的差是使用第一级中的16个减法器计算的,并且差的总和由第二级中的8个加法器、第三级中的4个加法器、四级中的2个加法器和最后一级中的1个加法器处理[3] 。但这种方法并没有区分亮暗点。
方案二:

圆形像素的强度和中心像素的强度之间的差的绝对值构成了diff向量。diff向量中的16个元素随后被mask滤波,以保留暗弧或亮弧上的那些像素,表示为滤波后diff。滤波diff不是相乘,而是通过diff阵列和mask之间的AND运算来计算。然后使用加法器树来对强度差求和,以获得像素的最终得分[11]。
Fast Score

where: dk are the difference values from one contiguous arc set of pixels, Ip is the pixel value, dk min is the minimum value from one contiguous arc set of pixels, score is the corner score.
方案一:

所有操作都是并行执行的,以便同时获得16个最小值。为了确定最小值和最大值,我们使用二进制比较树,获得最终结果[6]。
上一节
SLAM硬件加速之FPGA-base ORB(2)——FAST Detector
下一节
SLAM硬件加速之FPGA-base ORB(4)——Non-Maximum Suppression
Reference
[1]FPGA-based ORB Feature Extraction for Real-Time Visual SLAM. 2017
[2]FPGA Acceleration of Multilevel ORB Feature Extraction for Computer Vision. 2017
[3]A New FPGA Architecture of FAST and BRIEF Algorithm for On-Board Corner Detection and Matching. 2018
[4]High-throughput and area-optimized architecture for rbrief feature extraction. 2018
[5]eSLAM: An Energy-Efficient Accelerator for Real-Time ORB-SLAM on FPGA Platform. 2019
[6]An Efficient Real-Time FPGA-Based ORB Feature Extraction for an UHD Video Stream for Embedded Visual SLAM. 2022
[7]HcveAcc: A High-Performance and Energy-Efficient Accelerator for Tracking Task in VSLAM System. 2020 [8]ac2SLAM: FPGA Accelerated High-Accuracy SLAM with Heapsort and Parallel Keypoint Extractor. 2023
[9]Area-Time Efficient Streaming Architecture for FAST and BRIEF Detector. 2018
[10]A Low Latency Feature Extraction Accelerator with Reduced Internal Memory. 2017
[11]A 42fps Full-HD ORB Feature Extraction Accelerator with Reduced Memory Overhead.2017
[12]A Flexible and Efficient Real-Time ORB-Based Full-HD Image Feature Extraction Accelerator. 2020
[13]ORB-SLAM2: an Open-Source SLAM System for Monocular, Stereo and RGB-D Cameras. 2016















 1486
1486











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









