







 强化学习是一种从实验中学习的方法,通过找到最优行为来最大化奖励或成本函数。马尔可夫决策过程(MDP)是其数学基础,动态规划和蒙特卡洛方法是解决问题的手段。Q-learning是一种迭代学习策略,通过最大化Q值来寻找最优动作。Q-learning与SARSA等算法在on-policy和off-policy学习中有不同应用,适用于不同类型的强化学习任务。
强化学习是一种从实验中学习的方法,通过找到最优行为来最大化奖励或成本函数。马尔可夫决策过程(MDP)是其数学基础,动态规划和蒙特卡洛方法是解决问题的手段。Q-learning是一种迭代学习策略,通过最大化Q值来寻找最优动作。Q-learning与SARSA等算法在on-policy和off-policy学习中有不同应用,适用于不同类型的强化学习任务。
强化学习是从直接的实验中进行学习。Reinforcement learning is learning from direct experiments.
The goal of the learner is to find out the optimal behavior or actions to maximize the reward or the cost function。
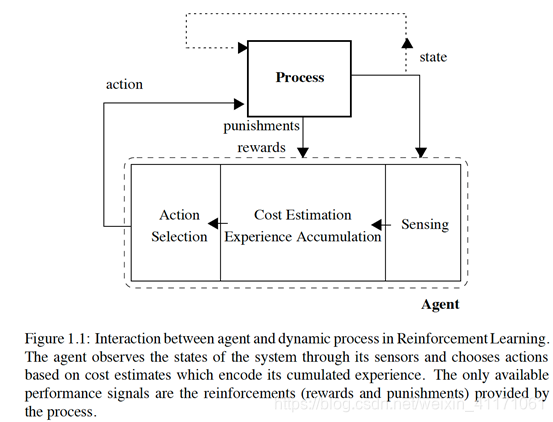
强化学习中,由于一阶马尔可夫链的限制,agent有时会对相同的状态有相同的表述,并且期望损失会重复计算,学术上称为感知混叠。(perceptual aliasing)解决方案可以是,采取比较多的过去信息,或者是加入注意力agent,在进行观测时,进行一定的选择。

A more concrete definition of learning agents:
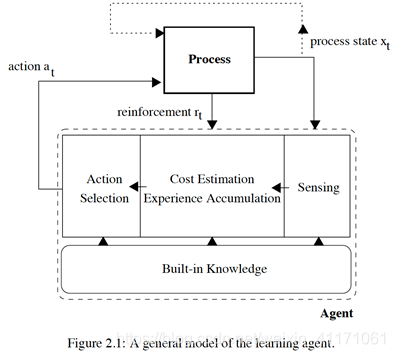
马尔可夫决策过程(MDP)是强化学习的基础数学模型。
马尔可夫决策过程采用动态规划可以较好的解决。但是,动态规划依赖于精确的模型。而强化学习的出发点是不需要精确的模型的。因此,从动态规划过渡到强化学习一种有效的方法是蒙特卡洛仿真。蒙特卡洛仿真实际上是代替了动态规划。
Conventional method: TD(λ),一阶时间差分算法。

时间差分方法是给定策略条件下,计算期望成本的一种方法。Although it can be used for the learning of action policies through the use of model-based iterative versions of the Policy Iteration algorithm, we would like to have a computational method for a direct model-free learning of optimal actions.
Q learning:是一种动作策略(action policy)学习迭代方法,并且给出了一种新的动作价值测度Q值:
理解:首先是对一个函数求期望,期望所针对的概率是什么?目前猜测是转移概率。函数是什么?有(1)给定当前状态和动作产生的奖励值:(2)给定下一步状态的最优的成本值,并加上一个折扣。表明:当前的reward和接下来状态的最小成本作为Q值。第二项就是一个期望,对未来一个状态的成本期望。但是这里V*是全局最优的cost value函数,意味着
是最优的策略。因此更进一步的,利用Bellman等式进行展开: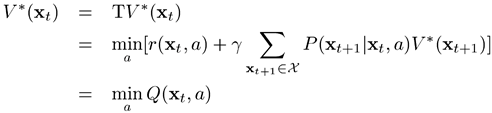
这个等式表明,给定当前状态,全局最优的cost value函数为当前状态的最小化Q值。
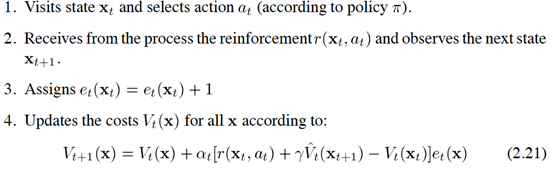
因此,结合Bellman不等式,可以总结出Q-learning的学习规则:![]()
Q值有一个非常重好的性质:他们是策略无关的或者是策略独立的,因此最优的动作optimal action能够被给出:![]()
可以发现,Q-learning其实都在利用最优的策略。因为最大化Q值,就是在寻找最优的策略。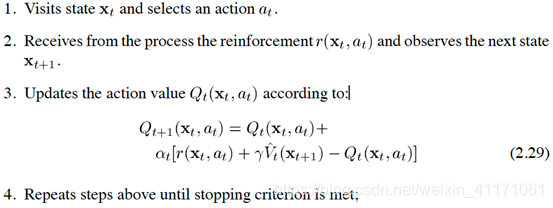
其中
![]()
Q-learning在学习过程中,实际上要对每一种状态求一个加权和,也就是期望。如果没种状态的转移概率都是相等的,那么即是找出转移到下一个Q值最大的状态。这就是一个学习或者是训练的过程。Q-learning是一种tabular learning,收敛相对较慢。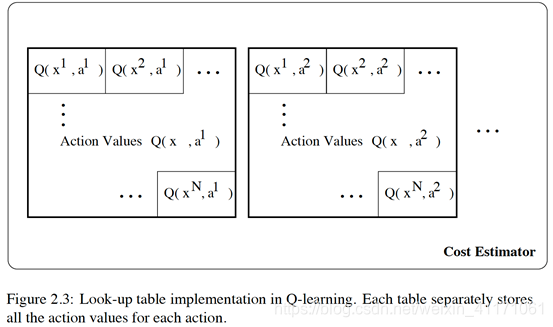
V值对应的是长期的价值判断,而奖励对应的是短期的瞬时的感受。类比
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 15万+
15万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









