




 本文详细介绍了无人机领域中各类坐标系的定义与转换关系,包括导航坐标系、机体坐标系、速度坐标系等,并探讨了不同坐标系间的转换顺序与角度定义的关系。
本文详细介绍了无人机领域中各类坐标系的定义与转换关系,包括导航坐标系、机体坐标系、速度坐标系等,并探讨了不同坐标系间的转换顺序与角度定义的关系。
- [x]作者简介:热爱科研的无人机(机器人)导航、制导、控制开发者。
如有错误,请指正,不吝感谢!
1、前言
我们在研究无人机、机器人、无人车等相关领域的导航、制导与控制算法时,需要了解各个坐标系的定义与相互转换关系。因为坐标系是为了更准确的描述无人机的位置和运动规律而选取的参考基准。譬如:我们知道牛顿力学方程是在惯性系下才成立的;多旋翼无人机的拉力(由螺旋桨旋转产生)则更容易表达在机体坐标系下;mems imu则固定在无人机机身,其敏感的力也常用机体坐标系表示;我们做无人机路径规划时,其规划的航点则基本表示为惯性系;当研究对象为固定翼无人机或导弹时,由于涉及到空气动力,更延伸出了速度坐标系和弹道坐标系(参见导弹飞行力学)。
2、坐标系定义
很多教程上直接给与了各个坐标系的定义,然后直接告诉各坐标系之间的转换关系。中间的细节进行了省略,导致很多从业者对各个坐标系的转换顺序很困惑。在此我们以最常用的321与231转换顺序进行举例,和大家一起了解各个坐标系的具体转换过程以及转换顺序与角度定义的关系。
2.1 导航坐标系
在此采用北东地坐标系,即正北为x轴,正东为y轴,z轴为右手原则确立。常采用无人机起飞前时刻的坐标点为坐标系原点,与地球固连,非绝对意义上的惯性坐标系,因为随地球转动而运动。
2.2 机体坐标系
我们以常用的前右下为机体坐标系,即无人机纵轴(前向)为x轴,右侧为y轴,z轴为右手原则确立,原点为无人机瞬时重心位置。其具体图形如下:
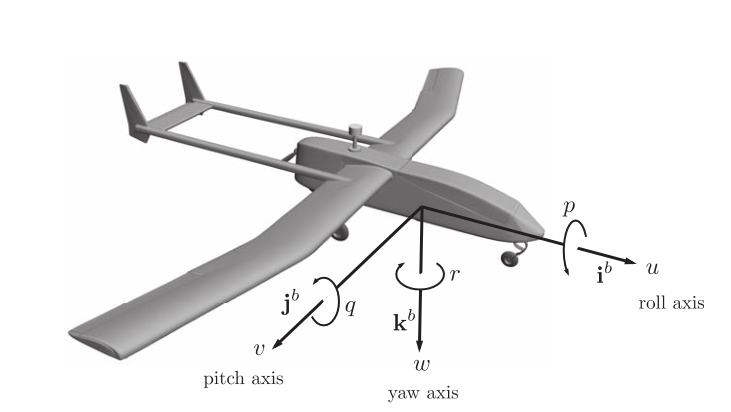
我们首先确立坐标系转换顺序为321,即依次绕zyx三个轴方向进行旋转。在此定义的姿态角度为:
偏航角yawyawyaw: 无人机纵轴在平面xoy的投影与ox轴之间的夹角,绕z轴右手旋转方向为正;
俯仰角pitchpitchpitch: 无人机纵轴(这里即x轴)与平面xoy之间的夹角,且绕y轴右手旋转方向为正;
滚转角rollrollroll: 机体坐标系z轴与包含无人机纵轴的铅垂面之间的夹角,同样绕x轴右手旋转方向为正;
需要注意的是:321与231的偏航角与俯仰角定义有所区别
若是231旋转顺序,则偏航角是纵轴与xoz平面的夹角,俯仰角则为纵轴的投影与ox轴间夹角
2.3 速度坐标系(风速坐标系)
对于旋翼机来说,该坐标系可以不考虑,该坐标系主要是用来表达气动力。该坐标系定义如下:以无人机相对风的速度矢量(注意与地速相区分)为x轴,无人机纵向对称面内且与x轴垂直方向为z轴,向下指向为正,y轴服从右手原则,原点为无人机瞬时重心。
该坐标系需要掌握的是攻角α\alphaα、侧滑角β\betaβ的计算方法。
攻角定义:无人机相对风的速度矢量在无人机纵向对称面的投影与纵轴之间的夹角;
侧滑角定义:无人机相对风的速度矢量与无人机纵向对称面之间的夹角;
其计算公式可以见matlab航天模块中flight parameters。
2.4 弹道坐标系
该坐标系定义如下:以无人机的速度矢量为x轴,在包含x轴的铅垂面内且与x轴垂直方向为z轴,y轴服从右手原则。
该坐标系主要是与制导律相关,理想情况下(即不考虑传感器误差),该坐标系的比例制导律效果最优。
弹道坐标系与导航坐标系之间的角度定义如下:
弹道偏角:无人机速度矢量在平面xoy的投影与ox轴之间的夹角;
弹道倾角:无人机的速度矢量与导航坐标系xoy间的夹角;
上述角度定义同样是与321转换顺序相互对应。
不考虑风矢量的情形下,该坐标系与速度坐标系之间只有一个旋转角度γs\gamma_sγs,记作速度倾斜角。
2.5 视线坐标系
视线坐标系主要是用来描述导引头或类似功能的传感器设备。其光轴方向为设备(常与无人机绑定)与目标点的连线方向,该方向为视线坐标系x轴,z轴为包含x轴的铅垂面内且与x轴垂直,y轴即右手坐标系确立。坐标系原点为设备光心位置。
当用单目相机对目标进行跟踪时,虽然单目相机不可以测距,但可以提取视线角度信息,然后利用视线信息对目标进行跟踪。
视线坐标系与导航坐标系之间的角度定义如下:
高低视线角qfq_fqf:光轴与导航坐标系xoy平面间的夹角;
水平视线角qhq_hqh:光轴在导航坐标系xoy平面间的投影与ox轴之间的夹角;
该角度的旋转顺序同样为321顺序。
Cqn=C(qf)∗C(qh)C_{qn} = C(q_f)*C(q_h)Cqn=C(qf)∗C(qh)
CqnC_{qn}Cqn为导航坐标系旋转至视线坐标系的旋转矩阵。
视线坐标系制导律相对弹道坐标系的优点在于其对传感器精度要求相对较低,因为其坐标转换关系相对更少
后续会详细介绍基于相机对目标的跟踪。
2.6 框架坐标系
框架坐标系主要是用来描述有些导引头的原始测量信息。其光轴方向为设备(常与无人机绑定)与目标点的连线方向,该方向为视线坐标系x轴,z轴为包含x轴的纵向对称面内且与x轴垂直,y轴即右手坐标系确立。坐标系原点为设备光心位置。
该坐标系与视线坐标系之间只有一个倾斜旋转角度。该坐标系与机体坐标系之间的角度为测量原始值,其定义如下:
高低框架角qθq_{\theta}qθ:光轴在无人机纵向对称面的投影与纵轴之间的夹角;
水平视线角qβq_{\beta}qβ:光轴与无人机纵向对称面之间的夹角;
3. 坐标转换

上述坐标转换总共涉及八个角度,知道任意5个,则可以获取其他三个。
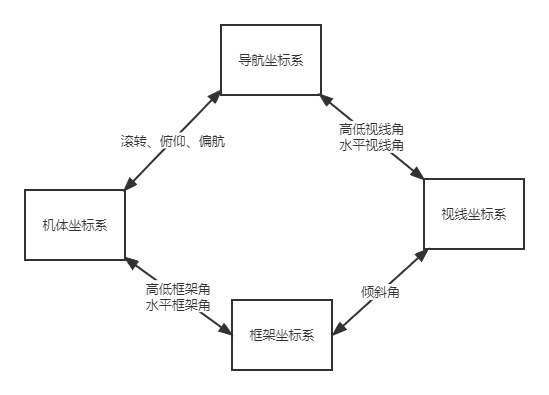
上述经常根据已知的qθq_{\theta}qθ、qβq_{\beta}qβ,求取导引律所需要的qfq_fqf、qhq_hqh
上述坐标转换的旋转矩阵可以通过matlab获取,比如导航坐标系至机体坐标系的旋转矩阵,可以由以下方式获取:
DCM = angle2dcm(yaw,pitch,roll,'zyx')
open angle2dcm %%查看转换公式
然后在该函数下寻找对应的旋转次数,比如本示例中是321旋转顺序,即对应的case为zyx。
坐标转换中常见的函数如下:
lla = ecef2lla(p, model) %地球地固坐标系转换至地理坐标系
p = lla2ecef(lla, model) %地理坐标系转换至地球地固坐标系
lla = eci2lla(position,utc) %地心惯性坐标系转换至地理坐标系
position = lla2eci(lla,utc) %地理坐标系转换至地心惯性坐标系
通过上述公式即可以ecef/eci/lla坐标系间的数值转换,其转换公式同样可以通过open函数查看。
4、下节内容介绍旋转矩阵、四元数、旋转向量、欧拉角的含义及工程应用,敬请期待。
❤️ 关注我领取海量matlab电子书和相关资料
❤️ 扫一扫,添加我的公众号

















 210
210

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









