







多传感器融合定位 第九章 基于优化的建图方法
代码下载:
https://github.com/kahowang/sensor-fusion-for-localization-and-mapping/tree/main/%E7%AC%AC%E4%B9%9D%E7%AB%A0%20%E5%9F%BA%E4%BA%8E%E4%BC%98%E5%8C%96%E7%9A%84%E5%BB%BA%E5%9B%BE%E6%96%B9%E6%B3%95
1.IMU预积分 残差对部分变量的雅克比
预积分残差公式如下
分别为:位置残差,姿态残差,速度残差,accel_bias 残差, gyro_bias 残差
[
r
p
r
q
r
v
r
b
a
r
b
g
]
=
[
q
w
b
i
∗
(
p
w
b
j
−
p
w
b
i
−
v
i
w
Δ
t
+
1
2
g
w
Δ
t
2
)
−
α
b
i
b
j
2
[
q
b
i
b
j
∗
⨂
(
q
w
b
i
∗
⨂
q
w
b
j
)
]
x
y
z
q
w
b
i
∗
(
v
j
w
−
v
i
w
+
g
w
Δ
t
)
−
β
b
i
b
j
b
j
a
−
b
i
a
b
j
g
−
b
i
g
]
\begin{bmatrix} r_p \\ r_q \\ r_v \\ r_{ba} \\ r_{bg} \end{bmatrix} = \begin{bmatrix} q_{wb_i}^{*}(p_{wb_j} - p_{wb_i} - v_i^w \Delta t + \frac{1}{2}g^w \Delta t^2) - \alpha_{b_i b_j} \\ 2[q_{b_i b_j}^{*} \bigotimes (q_{wb_i}^{*} \bigotimes q_{w b_j})]_{xyz} \\ q_{w b_i}^{*}(v_j^w - v_i^w + g^w \Delta t) - \beta_{b_i b_j} \\ b_j^a - b_i^a \\ b_j^g - b_i^g \end{bmatrix}
⎣⎢⎢⎢⎢⎡rprqrvrbarbg⎦⎥⎥⎥⎥⎤=⎣⎢⎢⎢⎢⎡qwbi∗(pwbj−pwbi−viwΔt+21gwΔt2)−αbibj2[qbibj∗⨂(qwbi∗⨂qwbj)]xyzqwbi∗(vjw−viw+gwΔt)−βbibjbja−biabjg−big⎦⎥⎥⎥⎥⎤
待优化变量
分别为:
i时刻的相对位置,i时刻的相对姿态,i时刻的速度,i时刻的accel_bias,i时刻的gyto_bias
j时刻的相对位置,j时刻的相对姿态,j时刻的速度,j时刻的accel_bias,j时刻的gyto_bias
[
p
w
b
i
q
w
b
i
v
i
w
b
i
a
b
i
g
]
[
p
w
b
j
q
w
b
j
V
j
w
b
j
a
b
j
g
]
\left[\begin{array}{lllll} \mathbf{p}_{w b_{i}} & \mathbf{q}_{w b_{i}} & \mathbf{v}_{i}^{w} & \mathbf{b}_{i}^{a} & \mathbf{b}_{i}^{g} \end{array}\right]\left[\begin{array}{lllll} \mathbf{p}_{w b_{j}} & \mathbf{q}_{w b_{j}} & \mathbf{V}_{j}^{w} & \mathbf{b}_{j}^{a} & \mathbf{b}_{j}^{g} \end{array}\right]
[pwbiqwbiviwbiabig][pwbjqwbjVjwbjabjg]
但在实际使用中,往往都是使用扰动量,因此实际是以下变量求雅克比
[
δ
p
w
b
i
δ
θ
w
b
i
δ
v
i
w
δ
b
i
a
δ
b
i
g
]
[
δ
p
w
b
j
δ
θ
w
b
j
δ
v
j
w
δ
b
j
a
δ
b
j
g
]
\begin{aligned} &{\left[\begin{array}{lllll} \delta \mathbf{p}_{w b_{i}} & \delta \theta_{w b_{i}} & \delta \mathbf{v}_{i}^{w} & \delta \mathbf{b}_{i}^{a} & \delta \mathbf{b}_{i}^{g} \end{array}\right]} \\ &{\left[\begin{array}{lllll} \delta \mathbf{p}_{w b_{j}} & \delta \theta_{w b_{j}} & \delta \mathbf{v}_{j}^{w} & \delta \mathbf{b}_{j}^{a} & \delta \mathbf{b}_{j}^{g} \end{array}\right]} \end{aligned}
[δpwbiδθwbiδviwδbiaδbig][δpwbjδθwbjδvjwδbjaδbjg]
1.1 位置残差的雅克比
1)对i时刻位置误差的雅克比
∂
r
p
∂
δ
p
w
b
i
=
∂
−
q
w
b
i
∗
(
p
w
b
i
+
δ
p
w
b
i
)
∂
δ
p
w
b
i
=
−
R
b
i
w
\begin{aligned} \frac{\partial \mathbf{r}_{p}}{\partial \delta \mathbf{p}_{w b_{i}}} &=\frac{\partial-\mathbf{q}_{w b_{i}}^{*}\left(\mathbf{p}_{w b_{i}}+\delta \mathbf{p}_{w b_{i}}\right)}{\partial \delta \mathbf{p}_{w b_{i}}} \\ &=-\mathbf{R}_{b_{i} w} \end{aligned}
∂δpwbi∂rp=∂δpwbi∂−qwbi∗(pwbi+δpwbi)=−Rbiw
2)对i时刻姿态误差的雅克比
推导套路:a.添加右扰动 b.把扰动移动到右边,然后消去
∂
r
p
∂
δ
θ
w
b
i
=
∂
(
q
w
b
i
⊗
[
1
1
2
δ
θ
w
b
i
]
)
∗
(
p
w
b
j
−
p
w
b
i
−
v
i
w
Δ
t
+
1
2
g
w
Δ
t
2
)
∂
δ
θ
w
b
i
=
∂
(
R
w
b
i
exp
(
δ
θ
w
b
i
∧
)
)
−
1
(
p
w
b
j
−
p
w
b
i
−
v
i
w
Δ
t
+
1
2
g
w
Δ
t
2
)
∂
δ
θ
w
b
i
=
∂
exp
(
(
−
δ
θ
w
b
i
)
∧
)
R
b
i
w
(
p
w
b
j
−
p
w
b
i
−
v
i
w
Δ
t
+
1
2
g
w
Δ
t
2
)
∂
δ
θ
w
b
i
≈
∂
(
I
−
δ
θ
w
b
i
∧
)
R
b
i
w
(
p
w
b
j
−
p
w
b
i
−
v
i
w
Δ
t
+
1
2
g
w
Δ
t
2
)
∂
δ
θ
w
b
i
=
(
R
b
i
w
(
p
w
b
j
−
p
w
b
i
−
v
i
w
Δ
t
+
1
2
g
w
Δ
t
2
)
)
∧
\begin{aligned} \frac{\partial \mathbf{r}_{p}}{\partial \delta \theta_{w b_{i}}} &=\frac{\partial\left(\mathbf{q}_{w b_{i}} \otimes\left[\begin{array}{c} 1 \\ \frac{1}{2} \delta \theta_{w b_{i}} \end{array}\right]\right)^{*}\left(\mathbf{p}_{w b_{j}}-\mathbf{p}_{w b_{i}}-\mathbf{v}_{i}^{w} \Delta t+\frac{1}{2} \mathbf{g}^{w} \Delta t^{2}\right)}{\partial \delta \theta_{w b_{i}}} \\ &=\frac{\partial\left(\mathbf{R}_{w b_{i}} \exp \left(\delta \theta_{w b_{i}}^{\wedge}\right)\right)^{-1}\left(\mathbf{p}_{w b_{j}}-\mathbf{p}_{w b_{i}}-\mathbf{v}_{i}^{w} \Delta t+\frac{1}{2} \mathbf{g}^{w} \Delta t^{2}\right)}{\partial \delta \theta_{w b_{i}}} \\ &=\frac{\partial \exp \left(\left(-\delta \theta_{w b_{i}}\right)^{\wedge}\right) \mathbf{R}_{b_{i} w}\left(\mathbf{p}_{w b_{j}}-\mathbf{p}_{w b_{i}}-\mathbf{v}_{i}^{w} \Delta t+\frac{1}{2} \mathbf{g}^{w} \Delta t^{2}\right)}{\partial \delta \theta_{w b_{i}}} \\ & \approx \frac{\partial\left(\mathbf{I}-\delta \theta_{w b_{i}}^{\wedge}\right) \mathbf{R}_{b_{i} w}\left(\mathbf{p}_{w b_{j}}-\mathbf{p}_{w b_{i}}-\mathbf{v}_{i}^{w} \Delta t+\frac{1}{2} \mathbf{g}^{w} \Delta t^{2}\right)}{\partial \delta \theta_{w b_{i}}} \\ &=\left(\mathbf{R}_{b_{i} w}\left(\mathbf{p}_{w b_{j}}-\mathbf{p}_{w b_{i}}-\mathbf{v}_{i}^{w} \Delta t+\frac{1}{2} \mathbf{g}^{w} \Delta t^{2}\right)\right)^{\wedge} \end{aligned}
∂δθwbi∂rp=∂δθwbi∂(qwbi⊗[121δθwbi])∗(pwbj−pwbi−viwΔt+21gwΔt2)=∂δθwbi∂(Rwbiexp(δθwbi∧))−1(pwbj−pwbi−viwΔt+21gwΔt2)=∂δθwbi∂exp((−δθwbi)∧)Rbiw(pwbj−pwbi−viwΔt+21gwΔt2)≈∂δθwbi∂(I−δθwbi∧)Rbiw(pwbj−pwbi−viwΔt+21gwΔt2)=(Rbiw(pwbj−pwbi−viwΔt+21gwΔt2))∧
3)对i时刻速度误差的雅克比
∂
r
p
∂
δ
v
i
w
=
−
R
b
i
w
Δ
t
\frac{\partial \mathbf{r}_{p}}{\partial \delta \mathbf{v}_{i}^{w}}=-\mathbf{R}_{b_{i} w} \Delta t
∂δviw∂rp=−RbiwΔt
4)对i时刻accel_bias误差的雅克比
∂
r
p
∂
δ
b
i
a
=
∂
−
(
α
ˉ
b
i
b
j
+
J
b
i
a
α
δ
b
i
a
+
J
b
i
g
α
δ
b
i
g
)
∂
δ
b
i
a
=
−
J
b
i
a
α
\begin{aligned} \frac{\partial \mathbf{r}_{p}}{\partial \delta \mathbf{b}_{i}^{a}} &=\frac{\partial-\left(\bar{\alpha}_{b_{i} b_{j}}+\mathbf{J}_{b_{i}^{a}}^{\alpha} \delta \mathbf{b}_{i}^{a}+\mathbf{J}_{b_{i}^{g}}^{\alpha} \delta \mathbf{b}_{i}^{g}\right)}{\partial \delta \mathbf{b}_{i}^{a}} \\ &=-\mathbf{J}_{b_{i}^{a}}^{\alpha} \end{aligned}
∂δbia∂rp=∂δbia∂−(αˉbibj+Jbiaαδbia+Jbigαδbig)=−Jbiaα
5)对i时刻gyro_bias误差的雅克比
∂
r
p
∂
δ
b
i
g
=
−
J
b
i
g
α
\frac{\partial \mathbf{r}_{p}}{\partial \delta \mathbf{b}_{i}^{g}}=-\mathbf{J}_{b_{i}^{g}}^{\alpha}
∂δbig∂rp=−Jbigα
6)对j时刻位置误差的雅克比
∂
r
p
∂
δ
p
w
b
j
=
R
b
i
w
\frac{\partial \mathbf{r}_{p}}{\partial \delta \mathbf{p}_{wb_{j}}}=\mathbf{R}_{b_{i} w}
∂δpwbj∂rp=Rbiw
7)对j时刻姿态误差的雅克比
∂
r
p
∂
δ
θ
w
b
j
=
0
\frac{\partial \mathbf{r}_{p}}{\partial \delta \theta_{w b_{j}}} =0
∂δθwbj∂rp=0
8)对j时刻速度误差的雅克比
∂
r
p
∂
δ
v
j
w
=
0
\frac{\partial \mathbf{r}_{p}}{\partial \delta \mathbf{v}_{j}^{w}}=0
∂δvjw∂rp=0
9)对j时刻accel_bias误差的雅克比
∂
r
p
∂
δ
b
j
a
=
0
\begin{aligned} \frac{\partial \mathbf{r}_{p}}{\partial \delta \mathbf{b}_{j}^{a}} &=0 \end{aligned}
∂δbja∂rp=0
10)对j时刻gyro_bias误差的雅克比
∂
r
p
∂
δ
b
j
g
=
0
\begin{aligned} \frac{\partial \mathbf{r}_{p}}{\partial \delta \mathbf{b}_{j}^{g}} &=0 \end{aligned}
∂δbjg∂rp=0
1.2 姿态残差的雅克比
1)对i时刻位置误差的雅克比
∂
r
q
∂
δ
p
w
b
i
=
0
\begin{aligned} \frac{\partial \mathbf{r}_{q}}{\partial \delta \mathbf{p}_{w b_{i}}} &=0 \end{aligned}
∂δpwbi∂rq=0
2)对i时刻姿态误差的雅克比 (课程已推)
∂
r
q
∂
δ
θ
b
i
b
i
′
=
∂
2
[
q
b
j
b
i
⊗
(
q
b
i
w
⊗
q
w
b
j
)
]
x
y
z
∂
δ
θ
b
i
b
i
′
=
∂
2
[
q
b
i
b
j
∗
⊗
(
q
w
b
i
⊗
[
1
1
2
δ
θ
b
i
b
i
′
]
]
)
∗
⊗
q
w
b
j
]
x
y
z
∂
δ
θ
b
i
b
i
′
=
∂
−
2
[
(
q
b
i
b
j
∗
⊗
(
q
w
b
i
⊗
[
1
1
2
δ
θ
b
i
b
i
′
]
]
)
∗
⊗
q
w
b
j
)
∗
]
x
y
z
∂
δ
θ
b
i
b
i
′
=
∂
−
2
[
q
w
b
j
∗
⊗
(
q
w
b
i
⊗
[
1
1
2
δ
θ
b
i
b
i
′
]
)
⊗
q
b
i
b
j
]
x
y
z
∂
δ
θ
b
i
b
i
′
\begin{aligned} \frac{\partial \mathbf{r}_{q}}{\partial \delta \boldsymbol{\theta}_{b_{i} b_{i}^{\prime}}} &=\frac{\partial 2\left[\mathbf{q}_{b_{j} b_{i}} \otimes\left(\mathbf{q}_{b_{i} w} \otimes \mathbf{q}_{w b_{j}}\right)\right]_{x y z}}{\partial \delta \boldsymbol{\theta}_{b_{i} b_{i}^{\prime}}} \\ &=\frac{\partial 2\left[\mathbf{q}_{b_{i} b_{j}}^{*} \otimes\left(\mathbf{q}_{w b_{i}} \otimes\left[\begin{array}{c} 1 \\ \left.\frac{1}{2} \delta \boldsymbol{\theta}_{b_{i} b_{i}^{\prime}}\right] \end{array}\right]\right)^{*} \otimes \mathbf{q}_{w b_{j}}\right]_{x y z}}{\partial \delta \boldsymbol{\theta}_{b_{i} b_{i}^{\prime}}} \\ &=\frac{\partial-2\left[\left(\mathbf{q}_{b_{i} b_{j}}^{*} \otimes\left(\mathbf{q}_{w b_{i}} \otimes\left[\begin{array}{c} 1 \\ \left.\frac{1}{2} \delta \boldsymbol{\theta}_{b_{i} b_{i}^{\prime}}\right] \end{array}\right]\right)^{*} \otimes \mathbf{q}_{w b_{j}}\right)^{*}\right]_{x y z}}{\partial \delta \boldsymbol{\theta}_{b_{i} b_{i}^{\prime}}} \\ &=\frac{\partial-2\left[\mathbf{q}_{w b_{j}}^{*} \otimes\left(\mathbf{q}_{w b_{i}} \otimes\left[\begin{array}{c} 1 \\ \frac{1}{2} \delta \boldsymbol{\theta}_{b_{i} b_{i}^{\prime}} \end{array}\right]\right) \otimes \mathbf{q}_{b_{i} b_{j}}\right]_{x y z}}{\partial \delta \boldsymbol{\theta}_{b_{i} b_{i}^{\prime}}} \end{aligned}
∂δθbibi′∂rq=∂δθbibi′∂2[qbjbi⊗(qbiw⊗qwbj)]xyz=∂δθbibi′∂2[qbibj∗⊗(qwbi⊗[121δθbibi′]])∗⊗qwbj]xyz=∂δθbibi′∂−2[(qbibj∗⊗(qwbi⊗[121δθbibi′]])∗⊗qwbj)∗]xyz=∂δθbibi′∂−2[qwbj∗⊗(qwbi⊗[121δθbibi′])⊗qbibj]xyz
∂ r q ∂ δ θ b i b i ′ = − 2 [ 0 I ] ∂ q w b j ∗ ⊗ ( q w b i ⊗ [ 1 1 2 δ θ b i b i ′ ] ) ⊗ q b i b j ∂ δ θ b i b i ′ = − 2 [ 0 I ] ∂ [ q w b j ∗ ⊗ q w b i ] L [ q b i b j ] R [ 1 1 2 δ θ b i b i ′ ] ∂ δ θ b i b i ′ = − 2 [ 0 I ] [ q w b j ∗ ⊗ q w b i ] L [ q b i b j ] R [ 0 1 2 I ] \begin{aligned} \frac{\partial \mathbf{r}_{q}}{\partial \delta \boldsymbol{\theta}_{b_{i} b_{i}^{\prime}}} &=-2\left[\begin{array}{ll} \mathbf{0} & \mathbf{I} \end{array}\right] \frac{\partial \mathbf{q}_{w b_{j}}^{*} \otimes\left(\mathbf{q}_{w b_{i}} \otimes\left[\begin{array}{c} 1 \\ \frac{1}{2} \delta \boldsymbol{\theta}_{b_{i} b_{i}^{\prime}} \end{array}\right]\right) \otimes \mathbf{q}_{b_{i} b_{j}}}{\partial \delta \boldsymbol{\theta}_{b_{i} b_{i}^{\prime}}} \\ &=-2\left[\begin{array}{ll} \mathbf{0} & \mathbf{I} \end{array}\right] \frac{\partial\left[\mathbf{q}_{w b_{j}}^{*} \otimes \mathbf{q}_{w b_{i}}\right]_{L}\left[\mathbf{q}_{b_{i} b_{j}}\right]_{R}\left[\begin{array}{c} 1 \\ \frac{1}{2} \delta \boldsymbol{\theta}_{b_{i} b_{i}^{\prime}} \end{array}\right]}{\partial \delta \boldsymbol{\theta}_{b_{i} b_{i}^{\prime}}} \\ &=-2\left[\begin{array}{ll} \mathbf{0} & \mathbf{I} \end{array}\right]\left[\mathbf{q}_{w b_{j}}^{*} \otimes \mathbf{q}_{w b_{i}}\right]_{L}\left[\mathbf{q}_{b_{i} b_{j}}\right]_{R}\left[\begin{array}{c} \mathbf{0} \\ \frac{1}{2} \mathbf{I} \end{array}\right] \end{aligned} ∂δθbibi′∂rq=−2[0I]∂δθbibi′∂qwbj∗⊗(qwbi⊗[121δθbibi′])⊗qbibj=−2[0I]∂δθbibi′∂[qwbj∗⊗qwbi]L[qbibj]R[121δθbibi′]=−2[0I][qwbj∗⊗qwbi]L[qbibj]R[021I]
3)对i时刻速度误差的雅克比
∂
r
q
∂
δ
v
i
w
=
0
\begin{aligned} \frac{\partial \mathbf{r}_{q}}{\partial \delta \mathbf{v}_{i}^{w}} &=0 \end{aligned}
∂δviw∂rq=0
4)对i时刻accel_bias误差的雅克比
∂
r
q
∂
δ
b
i
a
=
0
\begin{aligned} \frac{\partial \mathbf{r}_{q}}{\partial \delta \mathbf{b}_{i}^{a}} &=0 \end{aligned}
∂δbia∂rq=0
5)对i时刻gyro_bias误差的雅克比 (课程已推)
∂
r
q
∂
δ
b
i
g
=
∂
2
[
(
q
b
i
b
j
⊗
[
1
1
2
J
b
i
q
q
δ
b
i
g
]
)
∗
⊗
q
w
b
i
∗
⊗
q
w
b
j
]
x
y
z
∂
δ
b
i
g
=
∂
−
2
[
(
(
q
b
i
b
j
⊗
[
1
1
2
J
b
i
g
q
δ
b
i
g
]
)
∗
⊗
q
w
b
i
∗
⊗
q
w
b
j
)
∗
]
x
y
z
∂
δ
b
i
g
=
∂
−
2
[
q
w
b
j
∗
⊗
q
w
b
i
⊗
(
q
b
i
b
j
⊗
[
1
1
2
J
b
i
g
δ
b
i
g
]
)
]
x
y
z
∂
δ
b
i
g
=
−
2
[
0
I
]
[
q
w
b
j
∗
⊗
q
w
b
i
⊗
q
b
i
b
j
]
L
[
0
1
2
J
b
i
g
q
]
\begin{aligned} \frac{\partial \mathbf{r}_{q}}{\partial \delta \mathbf{b}_{i}^{g}} &=\frac{\partial 2\left[\left(\mathbf{q}_{b_{i} b_{j}} \otimes\left[\begin{array}{c} 1 \\ \frac{1}{2} \mathbf{J}_{b_{i}^{q}}^{q} \delta \mathbf{b}_{i}^{g} \end{array}\right]\right)^{*} \otimes \mathbf{q}_{w b_{i}}^{*} \otimes \mathbf{q}_{w b_{j}}\right]_{x y z}}{\partial \delta \mathbf{b}_{i}^{g}} \\ &=\frac{\partial-2\left[\left(\left(\mathbf{q}_{b_{i} b_{j}} \otimes\left[\begin{array}{c} 1 \\ \frac{1}{2} \mathbf{J}_{b_{i}^{g}}^{q} \delta \mathbf{b}_{i}^{g} \end{array}\right]\right)^{*} \otimes \mathbf{q}_{w b_{i}}^{*} \otimes \mathbf{q}_{w b_{j}}\right)^{*}\right]_{x y z}}{\partial \delta \mathbf{b}_{i}^{g}} \\ &=\frac{\partial-2\left[\mathbf{q}_{w b_{j}}^{*} \otimes \mathbf{q}_{w b_{i}} \otimes\left(\mathbf{q}_{b_{i} b_{j}} \otimes\left[\begin{array}{c} 1 \\ \frac{1}{2} \mathbf{J}_{b_{i}^{g}} \delta \mathbf{b}_{i}^{g} \end{array}\right]\right)\right]_{x y z}}{\partial \delta \mathbf{b}_{i}^{g}} \\ &=-2[\mathbf{0} \mathbf{I}]\left[\mathbf{q}_{w b_{j}}^{*} \otimes \mathbf{q}_{w b_{i}} \otimes \mathbf{q}_{b_{i} b_{j}}\right]_{L}\left[\begin{array}{c} 0 \\ \frac{1}{2} \mathbf{J}_{b_{i}^{g}}^{q} \end{array}\right] \end{aligned}
∂δbig∂rq=∂δbig∂2[(qbibj⊗[121Jbiqqδbig])∗⊗qwbi∗⊗qwbj]xyz=∂δbig∂−2[((qbibj⊗[121Jbigqδbig])∗⊗qwbi∗⊗qwbj)∗]xyz=∂δbig∂−2[qwbj∗⊗qwbi⊗(qbibj⊗[121Jbigδbig])]xyz=−2[0I][qwbj∗⊗qwbi⊗qbibj]L[021Jbigq]
6)对j时刻位置误差的雅克比
∂
r
q
∂
δ
p
w
b
j
=
0
\frac{\partial \mathbf{r}_{q}}{\partial \delta \mathbf{p}_{wb_{j}}}=0
∂δpwbj∂rq=0
7)对j时刻姿态误差的雅克比
∂
r
q
∂
δ
θ
w
b
j
=
∂
2
[
q
b
i
b
j
∗
⊗
q
w
b
i
∗
⊗
q
w
b
j
⊗
[
1
1
2
δ
θ
w
b
j
]
]
x
y
z
∂
δ
θ
w
b
j
=
2
[
0
I
]
[
q
b
i
b
j
∗
⊗
q
w
b
i
∗
⊗
q
w
b
j
]
L
[
1
1
2
I
]
\begin{aligned} \frac{\partial \mathbf{r}_{q}}{\partial \delta \theta_{w b_{j}}} &=\frac{\partial 2\left[\mathbf{q}_{b_{i} b_{j}}^{*} \otimes \mathbf{q}_{w b_{i}}^{*} \otimes \mathbf{q}_{w b_{j}} \otimes\left[\begin{array}{c} 1 \\ \frac{1}{2} \delta \theta_{w b_{j}} \end{array}\right]\right]_{x y z}}{\partial \delta \theta_{w b_{j}}} \\ &=2\left[\begin{array}{ll} 0 & \mathbf{I}]\left[\mathbf{q}_{b_{i} b_{j}}^{*} \otimes \mathbf{q}_{w b_{i}}^{*} \otimes \mathbf{q}_{w b_{j}}\right]_{L}\left[\begin{array}{c} 1 \\ \frac{1}{2} \mathbf{I} \end{array}\right] \end{array}\right. \end{aligned}
∂δθwbj∂rq=∂δθwbj∂2[qbibj∗⊗qwbi∗⊗qwbj⊗[121δθwbj]]xyz=2[0I][qbibj∗⊗qwbi∗⊗qwbj]L[121I]
8)对j时刻速度误差的雅克比
∂
r
q
∂
δ
v
j
w
=
0
\frac{\partial \mathbf{r}_{q}}{\partial \delta \mathbf{v}_{j}^{w}}=0
∂δvjw∂rq=0
9)对j时刻accel_bias误差的雅克比
∂
r
q
∂
δ
b
j
a
=
0
\begin{aligned} \frac{\partial \mathbf{r}_{q}}{\partial \delta \mathbf{b}_{j}^{a}} &=0 \end{aligned}
∂δbja∂rq=0
10)对j时刻gyro_bias误差的雅克比
∂
r
q
∂
δ
b
j
g
=
0
\begin{aligned} \frac{\partial \mathbf{r}_{q}}{\partial \delta \mathbf{b}_{j}^{g}} &=0 \end{aligned}
∂δbjg∂rq=0
1.3 速度残差的雅克比
1)对i时刻位置误差的雅克比
∂
r
v
∂
δ
p
w
b
i
=
0
\begin{aligned} \frac{\partial \mathbf{r}_{v}}{\partial \delta \mathbf{p}_{w b_{i}}} &=0 \end{aligned}
∂δpwbi∂rv=0
2)对i时刻姿态误差的雅克比
∂
r
v
∂
δ
θ
b
i
b
i
′
=
∂
(
q
w
b
i
⊗
[
1
1
2
δ
θ
b
i
b
i
′
]
)
−
1
(
v
j
w
−
v
i
w
+
g
w
Δ
t
)
∂
δ
θ
b
i
b
i
′
=
∂
(
R
w
b
i
exp
(
[
δ
θ
b
i
b
i
′
]
×
)
)
−
1
(
v
j
w
−
v
i
w
+
g
w
Δ
t
)
∂
δ
θ
b
i
b
i
′
=
∂
exp
(
[
−
δ
θ
b
i
b
i
′
]
×
)
R
b
i
w
(
v
j
w
−
v
i
w
+
g
w
Δ
t
)
∂
δ
θ
b
i
b
i
′
=
∂
(
I
−
[
δ
θ
b
i
b
i
′
]
×
)
R
b
i
w
(
v
j
w
−
v
i
w
+
g
w
Δ
t
)
∂
δ
θ
b
i
b
i
′
=
∂
−
[
δ
θ
b
i
b
i
′
]
×
R
b
i
w
(
v
j
w
−
v
i
w
+
g
w
Δ
t
)
∂
δ
θ
b
i
b
i
′
=
[
R
b
i
w
(
v
j
w
−
v
i
w
+
g
w
Δ
t
)
]
×
\begin{aligned} \frac{\partial \mathbf{r}_{v}}{\partial \delta \boldsymbol{\theta}_{b_{i} b_{i}^{\prime}}} &=\frac{\partial\left(\mathbf{q}_{w b_{i}} \otimes\left[\begin{array}{c} 1 \\ \frac{1}{2} \delta \boldsymbol{\theta}_{b_{i} b_{i}^{\prime}} \end{array}\right]\right)^{-1}\left(\mathbf{v}_{j}^{w}-\mathbf{v}_{i}^{w}+\mathbf{g}^{w} \Delta t\right)}{\partial \delta \boldsymbol{\theta}_{b_{i} b_{i}^{\prime}}} \\ &=\frac{\partial\left(\mathbf{R}_{w b_{i}} \exp \left(\left[\delta \boldsymbol{\theta}_{b_{i} b_{i}^{\prime}}\right]_{\times}\right)\right)^{-1}\left(\mathbf{v}_{j}^{w}-\mathbf{v}_{i}^{w}+\mathbf{g}^{w} \Delta t\right)}{\partial \delta \boldsymbol{\theta}_{b_{i} b_{i}^{\prime}}} \\ &=\frac{\partial \exp \left(\left[-\delta \boldsymbol{\theta}_{b_{i} b_{i}^{\prime}}\right]_{\times}\right) \mathbf{R}_{b_{i} w}\left(\mathbf{v}_{j}^{w}-\mathbf{v}_{i}^{w}+\mathbf{g}^{w} \Delta t\right)}{\partial \delta \boldsymbol{\theta}_{b_{i} b_{i}^{\prime}}} \\ &=\frac{\partial\left(\mathbf{I}-\left[\delta \boldsymbol{\theta}_{b_{i} b_{i}^{\prime}}\right]_{\times}\right) \mathbf{R}_{b_{i} w}\left(\mathbf{v}_{j}^{w}-\mathbf{v}_{i}^{w}+\mathbf{g}^{w} \Delta t\right)}{\partial \delta \boldsymbol{\theta}_{b_{i} b_{i}^{\prime}}} \\ &=\frac{\partial-\left[\delta \boldsymbol{\theta}_{b_{i} b_{i}^{\prime}}\right]_{\times} \mathbf{R}_{b_{i} w}\left(\mathbf{v}_{j}^{w}-\mathbf{v}_{i}^{w}+\mathbf{g}^{w} \Delta t\right)}{\partial \delta \boldsymbol{\theta}_{b_{i} b_{i}^{\prime}}} \\ &=\left[\mathbf{R}_{b_{i} w}\left(\mathbf{v}_{j}^{w}-\mathbf{v}_{i}^{w}+\mathbf{g}^{w} \Delta t\right)\right]_{\times} \end{aligned}
∂δθbibi′∂rv=∂δθbibi′∂(qwbi⊗[121δθbibi′])−1(vjw−viw+gwΔt)=∂δθbibi′∂(Rwbiexp([δθbibi′]×))−1(vjw−viw+gwΔt)=∂δθbibi′∂exp([−δθbibi′]×)Rbiw(vjw−viw+gwΔt)=∂δθbibi′∂(I−[δθbibi′]×)Rbiw(vjw−viw+gwΔt)=∂δθbibi′∂−[δθbibi′]×Rbiw(vjw−viw+gwΔt)=[Rbiw(vjw−viw+gwΔt)]×
3)对i时刻速度误差的雅克比
∂
r
v
∂
δ
v
i
w
=
−
R
b
i
w
\begin{aligned} \frac{\partial \mathbf{r}_{v}}{\partial \delta \mathbf{v}_{i}^{w}} &= -\mathbf{R}_{b_{i} w} \end{aligned}
∂δviw∂rv=−Rbiw
4)对i时刻accel_bias误差的雅克比
∂
r
v
∂
δ
b
i
a
=
−
∂
β
b
i
b
j
∂
δ
b
i
a
=
−
J
b
i
a
β
\frac{\partial \mathbf{r}_{v}}{\partial \delta \mathbf{b}_{i}^{a}}=-\frac{\partial \boldsymbol{\beta}_{b_{i} b_{j}}}{\partial \delta \mathbf{b}_{i}^{a}}=-\mathbf{J}_{b_{i}^{a}}^{\beta}
∂δbia∂rv=−∂δbia∂βbibj=−Jbiaβ
5)对i时刻gyro_bias误差的雅克比
∂
r
v
∂
δ
b
i
g
=
−
∂
β
b
i
b
j
∂
δ
b
i
a
=
−
J
b
i
g
β
\frac{\partial \mathbf{r}_{v}}{\partial \delta \mathbf{b}_{i}^{g}}=-\frac{\partial \boldsymbol{\beta}_{b_{i} b_{j}}}{\partial \delta \mathbf{b}_{i}^{a}}=-\mathbf{J}_{b_{i}^{g}}^{\beta}
∂δbig∂rv=−∂δbia∂βbibj=−Jbigβ
6)对j时刻位置误差的雅克比
∂
r
v
∂
δ
p
w
b
j
=
0
\frac{\partial \mathbf{r}_{v}}{\partial \delta \mathbf{p}_{wb_{j}}}=0
∂δpwbj∂rv=0
7)对j时刻姿态误差的雅克比
∂
r
v
∂
δ
θ
w
b
j
=
0
\begin{aligned} \frac{\partial \mathbf{r}_{v}}{\partial \delta \theta_{w b_{j}}} &=0 \end{aligned}
∂δθwbj∂rv=0
8)对j时刻速度误差的雅克比
∂
r
v
∂
δ
v
j
w
=
R
b
i
w
\frac{\partial \mathbf{r}_{v}}{\partial \delta \mathbf{v}_{j}^{w}} = \mathbf{R}_{b_{i} w}
∂δvjw∂rv=Rbiw
9)对j时刻accel_bias误差的雅克比
∂
r
v
∂
δ
b
j
a
=
0
\begin{aligned} \frac{\partial \mathbf{r}_{v}}{\partial \delta \mathbf{b}_{j}^{a}} &=0 \end{aligned}
∂δbja∂rv=0
10)对j时刻gyro_bias误差的雅克比
∂
r
v
∂
δ
b
j
g
=
0
\begin{aligned} \frac{\partial \mathbf{r}_{v}}{\partial \delta \mathbf{b}_{j}^{g}} &=0 \end{aligned}
∂δbjg∂rv=0
1.4 加速度零偏残差的雅克比
1)对i时刻位置误差的雅克比
∂
r
b
a
∂
δ
p
w
b
i
=
0
\frac{\partial \mathbf{r}_{b^{a}}}{\partial \delta \mathbf{p}_{w b_{i}}}=\mathbf{0}
∂δpwbi∂rba=0
2)对i时刻姿态误差的雅克比
∂
r
b
a
∂
δ
θ
w
b
i
=
0
\begin{aligned} \frac{\partial \mathbf{r}_{b^{a}}}{\partial \delta \boldsymbol{\theta}_{wb_{i} {}}} &=0 \end{aligned}
∂δθwbi∂rba=0
3)对i时刻速度误差的雅克比
∂
r
b
a
∂
δ
v
i
w
=
0
\begin{aligned} \frac{\partial \mathbf{r}_{b^{a}}}{\partial \delta \mathbf{v}_{i}^{w}} &= 0 \end{aligned}
∂δviw∂rba=0
4)对i时刻accel_bias误差的雅克比
∂
r
b
a
∂
δ
b
i
a
=
−
I
\frac{\partial \mathbf{r}_{b^{a}}}{\partial \delta \mathbf{b}_{i}^{a}}=-I
∂δbia∂rba=−I
5)对i时刻gyro_bias误差的雅克比
∂
r
b
a
∂
δ
b
i
g
=
0
\frac{\partial \mathbf{r}_{b^{a}}}{\partial \delta \mathbf{b}_{i}^{g}}=0
∂δbig∂rba=0
6)对j时刻位置误差的雅克比
∂
r
b
a
∂
δ
p
w
b
j
=
0
\frac{\partial \mathbf{r}_{b^{a}}}{\partial \delta \mathbf{p}_{w b_{j}}}=\mathbf{0}
∂δpwbj∂rba=0
7)对j时刻姿态误差的雅克比
∂
r
b
a
∂
δ
θ
w
b
j
=
0
\begin{aligned} \frac{\partial \mathbf{r}_{b^{a}}}{\partial \delta \boldsymbol{\theta}_{wb_{j} {}}} &=0 \end{aligned}
∂δθwbj∂rba=0
8)对j时刻速度误差的雅克比
∂
r
b
a
∂
δ
v
j
w
=
0
\begin{aligned} \frac{\partial \mathbf{r}_{b^{a}}}{\partial \delta \mathbf{v}_{j}^{w}} &= 0 \end{aligned}
∂δvjw∂rba=0
9)对j时刻accel_bias误差的雅克比
∂
r
b
a
∂
δ
b
j
a
=
I
\frac{\partial \mathbf{r}_{b^{a}}}{\partial \delta \mathbf{b}_{j}^{a}}=I
∂δbja∂rba=I
10)对j时刻gyro_bias误差的雅克比
∂
r
b
a
∂
δ
b
j
g
=
0
\frac{\partial \mathbf{r}_{b^{a}}}{\partial \delta \mathbf{b}_{j}^{g}}=0
∂δbjg∂rba=0
1.5 角速度零偏残差雅克比
1)对i时刻位置误差的雅克比
∂
r
b
g
∂
δ
p
w
b
i
=
0
\frac{\partial \mathbf{r}_{b^{g}}}{\partial \delta \mathbf{p}_{w b_{i}}}=\mathbf{0}
∂δpwbi∂rbg=0
2)对i时刻姿态误差的雅克比
∂
r
b
g
∂
δ
θ
w
b
i
=
0
\begin{aligned} \frac{\partial \mathbf{r}_{b^{g}}}{\partial \delta \boldsymbol{\theta}_{wb_{i} {}}} &=0 \end{aligned}
∂δθwbi∂rbg=0
3)对i时刻速度误差的雅克比
∂
r
b
g
∂
δ
v
i
w
=
0
\begin{aligned} \frac{\partial \mathbf{r}_{b^{g}}}{\partial \delta \mathbf{v}_{i}^{w}} &= 0 \end{aligned}
∂δviw∂rbg=0
4)对i时刻accel_bias误差的雅克比
∂
r
b
g
∂
δ
b
i
a
=
0
\frac{\partial \mathbf{r}_{b^{g}}}{\partial \delta \mathbf{b}_{i}^{a}}=0
∂δbia∂rbg=0
5)对i时刻gyro_bias误差的雅克比
∂
r
b
g
∂
δ
b
i
g
=
−
I
\frac{\partial \mathbf{r}_{b^{g}}}{\partial \delta \mathbf{b}_{i}^{g}}=-I
∂δbig∂rbg=−I
6)对j时刻位置误差的雅克比
∂
r
b
g
∂
δ
p
w
b
j
=
0
\frac{\partial \mathbf{r}_{b^{g}}}{\partial \delta \mathbf{p}_{w b_{j}}}=\mathbf{0}
∂δpwbj∂rbg=0
7)对j时刻姿态误差的雅克比
∂
r
b
g
∂
δ
θ
w
b
j
=
0
\begin{aligned} \frac{\partial \mathbf{r}_{b^{g}}}{\partial \delta \boldsymbol{\theta}_{wb_{j} {}}} &=0 \end{aligned}
∂δθwbj∂rbg=0
8)对j时刻速度误差的雅克比
∂
r
b
g
∂
δ
v
j
w
=
0
\begin{aligned} \frac{\partial \mathbf{r}_{b^{g}}}{\partial \delta \mathbf{v}_{j}^{w}} &= 0 \end{aligned}
∂δvjw∂rbg=0
9)对j时刻accel_bias误差的雅克比
∂
r
b
g
∂
δ
b
j
a
=
0
\frac{\partial \mathbf{r}_{b^{g}}}{\partial \delta \mathbf{b}_{j}^{a}}=0
∂δbja∂rbg=0
10)对j时刻gyro_bias误差的雅克比
∂
r
b
g
∂
δ
b
j
g
=
I
\frac{\partial \mathbf{r}_{b^{g}}}{\partial \delta \mathbf{b}_{j}^{g}}=I
∂δbjg∂rbg=I
2.补全预积分部分代码
预积分代码填充部分,参考作业的示例里为松鹏大哥的代码,此部分代码,在求解残差雅克比时,使用的是vins的写法,所以与课程的ppt公式会有所不同。本节的作业补全代码提供 1.作业讲评的代码参考 2. 按照作业ppt公式推导的代码参考
2.1 作业讲评的代码参考
FILE : lidar_localization/src/models/pre_integrator/imu_pre_integrator.cpp UpdateState()
注意:在误差雅克比推导过程中
a.F12 PPT中的推导为( I - w.vee()*delta_t ) , 而 dR_inv = d_theta_ij.inverse().matrix() , 两者是近似的,因为(I - w.vee()*delta_t ) 近似与 exp(-theta) ,exp(-theta)为-theta进行so3的指数映射,所以exp(-theta) = (exp(theta))^-1 = R.inverse()
b.F 和 B阵的写法按照vins的写法 ,例如 F_k+1 = I + F_k * T ; B_k+1 = B_k * T
// TODO: a. update mean:
//
// 1. get w_mid:
w_mid = 0.5 * (prev_w + curr_w) ;
// 2. update relative orientation, so3: 更新新姿态角
prev_theta_ij = state.theta_ij_;
d_theta_ij = Sophus::SO3d::exp(w_mid * T) ; // ij 时刻的相对姿态
state.theta_ij_ = state.theta_ij_ * d_theta_ij ; // 当前时刻姿态更新
curr_theta_ij = state.theta_ij_ ;
// 3. get a_mid:
a_mid = 0.5 * (prev_theta_ij * prev_a + curr_theta_ij * curr_a); // aceel world系下
// 4. update relative translation: 更新平移
state.alpha_ij_ += state.beta_ij_ * T + 0.5 * a_mid * T * T ; // p_k+1 = v_k * T + 0.5*a_k+1*t*t
// 5. update relative velocity:
state.beta_ij_ += a_mid * T; // vel world系下
// TODO: b. update covariance:
//
// 1. intermediate results:
dR_inv = d_theta_ij.inverse().matrix();
prev_R = prev_theta_ij.matrix();
curr_R = curr_theta_ij.matrix();
prev_R_a_hat = prev_R * Sophus::SO3d::hat(prev_a) ;
curr_R_a_hat = curr_R * Sophus::SO3d::hat(curr_a) ;
// TODO: 2. set up F:
//
// F12 & F22 & F32: F_k 和 G_k 是离散时间下的状态传递方程中的矩阵,一般是在连续时间下推导微分方程,再用它计算离散时间下的传递方程
F_.block<3, 3>(INDEX_ALPHA, INDEX_THETA) = -0.25 * T * (prev_R_a_hat + curr_R_a_hat * dR_inv) ; // F12
F_.block<3, 3>(INDEX_BETA, INDEX_THETA) = - 0.5 * T *(prev_R_a_hat + curr_R_a_hat * dR_inv ) ; // F32
// F14 & F34:
F_.block<3,3>(INDEX_ALPHA, INDEX_B_A) = -0.25 * T * (prev_R + curr_R); // F14
F_.block<3,3>(INDEX_BETA,INDEX_B_A) = -0.5 * (prev_R + curr_R); // F34
// F15 & F25 & F35:
F_.block<3,3>(INDEX_ALPHA, INDEX_B_G) = 0.25 * T * T * curr_R_a_hat ; // F15
F_.block<3,3>(INDEX_BETA, INDEX_B_G) = 0.5 * T * curr_R_a_hat; // F35
// F22
F_.block<3, 3>(INDEX_THETA, INDEX_THETA) = - Sophus::SO3d::hat(w_mid) ; // F22
// TODO: 3. set up B:
//
// G11 & G31:
B_.block<3,3>(INDEX_ALPHA, INDEX_M_ACC_PREV) = 0.25 * prev_R * T ; // G11
B_.block<3,3>(INDEX_BETA, INDEX_M_ACC_PREV) = 0.5 * prev_R ; // G31
// G12 & G22 & G32:
B_.block<3,3>(INDEX_ALPHA, INDEX_M_GYR_PREV) = -0.125 * T * T * curr_R_a_hat ; // G12
B_.block<3,3>(INDEX_BETA, INDEX_M_GYR_PREV) = -0.25 * T *curr_R_a_hat ; // G32
// G13 & G33:
B_.block<3,3>(INDEX_ALPHA, INDEX_M_ACC_CURR) = 0.25 * curr_R * T ; // G13
B_.block<3,3>(INDEX_BETA, INDEX_M_ACC_CURR) = 0.5 * curr_R ; // G33
// G14 & G24 & G34:
B_.block<3,3>(INDEX_ALPHA, INDEX_M_GYR_CURR) = -0.125 * T * T * curr_R_a_hat; // G14
B_.block<3,3>(INDEX_BETA,INDEX_M_GYR_CURR ) = -0.25 * T *curr_R_a_hat; // G34
// TODO: 4. update P_:
MatrixF F = MatrixF::Identity() + T *F_ ;
MatrixB B = T * B_;
P_ = F * P_ * F.transpose() + B * Q_ * B.transpose() ; // Q imu噪声的方差
// TODO: 5. update Jacobian:
//
J_ = F * J_ ;
FILE : lidar_localization/include/lidar_localization/models/graph_optimizer/g2o/edge/edge_prvag
_imu_pre_integration.hpp computeError()
注意:残差推导的R项中,课程参考代码推导方式使用SO3 旋转矩阵推导。而ppt中的推导方式使用的是四元数,当theta为微小量是,使用四元数进行推导的残差四元数的虚部 近似于 2/theta, 所以如果是用四元数的虚部表示残差r_q时,是需要在四元数虚部的基础上乘2。
// TODO: update pre-integration measurement caused by bias change:
//
if (v0 -> isUpdated() ) {
Eigen::Vector3d d_b_a_i , d_b_g_i ;
v0->getDeltaBiases(d_b_a_i, d_b_g_i);
updateMeasurement(d_b_a_i,d_b_g_i);
}
// TODO: compute error:
//
const Eigen::Vector3d &alpha_ij = _measurement.block<3, 1>(INDEX_P, 0); // 获取观测值
const Eigen::Vector3d &theta_ij = _measurement.block<3, 1>(INDEX_R, 0);
const Eigen::Vector3d &beta_ij = _measurement.block<3, 1>(INDEX_V, 0);
_error.block<3, 1>(INDEX_P, 0) = ori_i.inverse().matrix() * (pos_j - pos_i - vel_i * T_ + 0.5 * g_ * T_ * T_) - alpha_ij;
_error.block<3,1>(INDEX_R, 0) = (Sophus::SO3d::exp(theta_ij).inverse() * ori_i.inverse() * ori_j).log();
_error.block<3, 1>(INDEX_V, 0) = ori_i.inverse() * (vel_j - vel_i + g_ * T_) - beta_ij;
_error.block<3, 1>(INDEX_A, 0) = b_a_j - b_a_i;
_error.block<3, 1>(INDEX_G, 0) = b_g_j - b_g_i;
lidar_localization/include/lidar_localization/models/graph_optimizer/g2o/vertex/vertex_prva
g.hpp oplusImpl()
virtual void oplusImpl(const double *update) override {
//
// TODO: do update
//
_estimate.pos += Eigen::Vector3d(
update[PRVAG::INDEX_POS + 0], update[PRVAG::INDEX_POS + 1], update[PRVAG::INDEX_POS + 2]
);
_estimate.ori = _estimate.ori * Sophus::SO3d::exp(
Eigen::Vector3d(
update[PRVAG::INDEX_ORI + 0], update[PRVAG::INDEX_ORI + 1], update[PRVAG::INDEX_ORI + 2]
)
);
_estimate.vel += Eigen::Vector3d(
update[PRVAG::INDEX_VEL + 0], update[PRVAG::INDEX_VEL + 1], update[PRVAG::INDEX_VEL + 2]
);
Eigen::Vector3d d_b_a_i(
update[PRVAG::INDEX_B_A + 0], update[PRVAG::INDEX_B_A + 1], update[PRVAG::INDEX_B_A + 2]
);
Eigen::Vector3d d_b_g_i(
update[PRVAG::INDEX_B_G + 0], update[PRVAG::INDEX_B_G + 1], update[PRVAG::INDEX_B_G + 2]
);
_estimate.b_a += d_b_a_i ;
_estimate.b_g += d_b_g_i;
updateDeltaBiases(d_b_a_i, d_b_g_i);
}
2.2 按照课程ppt公式推导的代码参考
FILE : lidar_localization/src/models/pre_integrator/imu_pre_integrator.cpp UpdateState()
//
// TODO: a. update mean: 名义值更新:中值积分
//
// 1. get w_mid:
w_mid = 0.5 * (prev_w + curr_w) ;
// 2. update relative orientation, so3: 更新新姿态角
prev_theta_ij = state.theta_ij_;
d_theta_ij = Sophus::SO3d::exp(w_mid * T) ; // ij 时刻的相对姿态
state.theta_ij_ = state.theta_ij_ * d_theta_ij ; // 当前时刻姿态更新
curr_theta_ij = state.theta_ij_ ;
// 3. get a_mid:
a_mid = 0.5 * (prev_theta_ij * prev_a + curr_theta_ij * curr_a); // aceel world系下
// 4. update relative translation: 更新平移
state.alpha_ij_ += state.beta_ij_ * T + 0.5 * a_mid * T * T ; // p_k+1 = v_k * T + 0.5*a_k+1*t*t
// 5. update relative velocity:
state.beta_ij_ += a_mid * T; // vel world系下
// TODO: b. update covariance: 误差值更新: 中间值
//
// 1. intermediate results:
dR_inv = d_theta_ij.inverse().matrix();
prev_R = prev_theta_ij.matrix();
curr_R = curr_theta_ij.matrix();
prev_R_a_hat = prev_R * Sophus::SO3d::hat(prev_a) ;
curr_R_a_hat = curr_R * Sophus::SO3d::hat(curr_a) ;
// TODO: 2. set up F: 误差更新:F矩阵
//
// F12 & F22 & F32: F_k 和 G_k 是离散时间下的状态传递方程中的矩阵,一般是在连续时间下推导微分方程,再用它计算离散时间下的传递方程
F_ = MatrixF::Identity();
F_.block<3, 3>(INDEX_ALPHA, INDEX_THETA) = -0.25 * T * T * (prev_R_a_hat + curr_R_a_hat * (Eigen::Matrix3d::Identity() - Sophus::SO3d::hat(w_mid)*T ) ) ; // F12
F_.block<3, 3>(INDEX_THETA, INDEX_THETA) = Eigen::Matrix3d::Identity() - Sophus::SO3d::hat(w_mid)*T ; // F22
F_.block<3, 3>(INDEX_BETA, INDEX_THETA) = - 0.5 * T *(prev_R_a_hat + curr_R_a_hat * (Eigen::Matrix3d::Identity() - Sophus::SO3d::hat(w_mid)*T ) ) ; // F32
// F13
F_.block<3, 3>(INDEX_ALPHA, INDEX_BETA) = Eigen::Matrix3d::Identity() * T ; // F13
// F14 & F34:
F_.block<3,3>(INDEX_ALPHA, INDEX_B_A) = -0.25 * T * T * (prev_R + curr_R); // F14
F_.block<3,3>(INDEX_BETA,INDEX_B_A) = -0.5 * T * (prev_R + curr_R); // F34
// F15 & F25 & F35:
F_.block<3,3>(INDEX_ALPHA, INDEX_B_G) = 0.25 * T * T * T * curr_R_a_hat ; // F15
F_.block<3,3>(INDEX_THETA, INDEX_B_G) = - Eigen::Matrix3d::Identity() * T ; // F25
F_.block<3,3>(INDEX_BETA, INDEX_B_G) = 0.5 * T * T * curr_R_a_hat; // F35
// TODO: 3. set up B: 误差更新:B矩阵
//
B_ = MatrixB::Zero();
// G11 & G31:
B_.block<3,3>(INDEX_ALPHA, INDEX_M_ACC_PREV) = 0.25 * prev_R * T *T; // G11
B_.block<3,3>(INDEX_BETA, INDEX_M_ACC_PREV) = 0.5 * prev_R * T ; // G31
// G12 & G22 & G32:
B_.block<3,3>(INDEX_ALPHA, INDEX_M_GYR_PREV) = -0.125 * T * T * T * curr_R_a_hat ; // G12
B_.block<3,3>(INDEX_THETA, INDEX_M_GYR_PREV) = 0.5 * T * Eigen::Matrix3d::Identity() ; // G22
B_.block<3,3>(INDEX_BETA, INDEX_M_GYR_PREV) = -0.25 * T * T *curr_R_a_hat ; // G32
// G13 & G33:
B_.block<3,3>(INDEX_ALPHA, INDEX_M_ACC_CURR) = 0.25 * curr_R * T * T; // G13
B_.block<3,3>(INDEX_BETA, INDEX_M_ACC_CURR) = 0.5 * curr_R * T; // G33
// G14 & G24 & G34:
B_.block<3,3>(INDEX_ALPHA, INDEX_M_GYR_CURR) = -0.125 * T * T * T * curr_R_a_hat; // G14
B_.block<3,3>(INDEX_THETA, INDEX_M_GYR_CURR) = 0.5 * Eigen::Matrix3d::Identity() * T ; // G24
B_.block<3,3>(INDEX_BETA,INDEX_M_GYR_CURR ) = -0.25 * T * T *curr_R_a_hat; // G34
//G45
B_.block<3,3>(INDEX_B_A, INDEX_R_ACC_PREV) = Eigen::Matrix3d::Identity() * T; //G45
//G56
B_.block<3,3>(INDEX_B_G, INDEX_R_GYR_PREV) = Eigen::Matrix3d::Identity() * T; //G56
// TODO: 4. update P_: 误差更新 P 矩阵
P_ = F_ * P_ * F_.transpose() + B_ * Q_ * B_.transpose() ; // Q imu噪声的方差
// TODO: 5. update Jacobian: 误差更新 J 矩阵
//
J_ = F_ * J_ ;
FILE : lidar_localization/include/lidar_localization/models/graph_optimizer/g2o/edge/edge_prvag
_imu_pre_integration.hpp computeError()
// TODO: update pre-integration measurement caused by bias change: 更新预积分部分(由于bias的改变,产生的变化)
//
if (v0 -> isUpdated() ) {
Eigen::Vector3d d_b_a_i , d_b_g_i ;
v0->getDeltaBiases(d_b_a_i, d_b_g_i);
updateMeasurement(d_b_a_i,d_b_g_i);
}
// TODO: compute error:
//
const Eigen::Vector3d &alpha_ij = _measurement.block<3, 1>(INDEX_P, 0); // 获取观测值
const Eigen::Vector3d &theta_ij = _measurement.block<3, 1>(INDEX_R, 0);
const Eigen::Vector3d &beta_ij = _measurement.block<3, 1>(INDEX_V, 0);
Eigen::Quaterniond q_ij = Eigen::Quaterniond(Sophus::SO3d::exp(theta_ij).matrix());
Eigen::Quaterniond q_wbi = Eigen::Quaterniond(ori_i.matrix());
Eigen::Quaterniond q_wbj = Eigen::Quaterniond(ori_j.matrix());
_error.block<3, 1>(INDEX_P, 0) = ori_i.inverse().matrix() * (pos_j - pos_i - vel_i * T_ + 0.5 * g_ * T_ * T_) - alpha_ij;
_error.block<3, 1>(INDEX_R, 0) = 2*(q_ij.conjugate() * (q_wbi.conjugate() * q_wbj)).vec(); // 当theta为小量时,theta 近似于 四元数的虚部的两倍
_error.block<3, 1>(INDEX_V, 0) = ori_i.inverse() * (vel_j - vel_i + g_ * T_) - beta_ij;
_error.block<3, 1>(INDEX_A, 0) = b_a_j - b_a_i;
_error.block<3, 1>(INDEX_G, 0) = b_g_j - b_g_i;
lidar_localization/include/lidar_localization/models/graph_optimizer/g2o/vertex/vertex_prva
g.hpp oplusImpl()
virtual void oplusImpl(const double *update) override { // 顶点更新
//
// TODO: do update
//
_estimate.pos += Eigen::Vector3d(
update[PRVAG::INDEX_POS + 0], update[PRVAG::INDEX_POS + 1], update[PRVAG::INDEX_POS + 2]
);
_estimate.ori = _estimate.ori * Sophus::SO3d::exp(
Eigen::Vector3d(
update[PRVAG::INDEX_ORI + 0], update[PRVAG::INDEX_ORI + 1], update[PRVAG::INDEX_ORI + 2]
)
);
_estimate.vel += Eigen::Vector3d(
update[PRVAG::INDEX_VEL + 0], update[PRVAG::INDEX_VEL + 1], update[PRVAG::INDEX_VEL + 2]
);
Eigen::Vector3d d_b_a_i(
update[PRVAG::INDEX_B_A + 0], update[PRVAG::INDEX_B_A + 1], update[PRVAG::INDEX_B_A + 2]
);
Eigen::Vector3d d_b_g_i(
update[PRVAG::INDEX_B_G + 0], update[PRVAG::INDEX_B_G + 1], update[PRVAG::INDEX_B_G + 2]
);
_estimate.b_a += d_b_a_i ;
_estimate.b_g += d_b_g_i;
updateDeltaBiases(d_b_a_i, d_b_g_i);
}
3.evo 评估 used imu_pre and no uded imu_pre
3.1 选择是否融合imu_pre
gnss 、 loop_close、imu_pre_integration、odo-pre_integration 开关
FILE : lidar_localiation/config/mapping/lio_back_end.yaml
# 1. g2o
graph_optimizer_type: g2o
# config measurement used:
# a. GNSS
use_gnss: true
# b. loop closure
use_loop_close: true
# c. IMU pre-integration 使用预积分:true 不使用预积分:false
use_imu_pre_integration: false
# c. odo pre-integration
use_odo_pre_integration: true
evo_rpe kitti ground_truth.txt optimized.txt -r trans_part --delta 100 --plot --plot_mode xyz
evo_ape kitti ground_truth.txt optimized.txt -r full --plot --plot_mode xyz
3.2 使用作业讲评代码
| no used imu_pre | used imu_pre | |
|---|---|---|
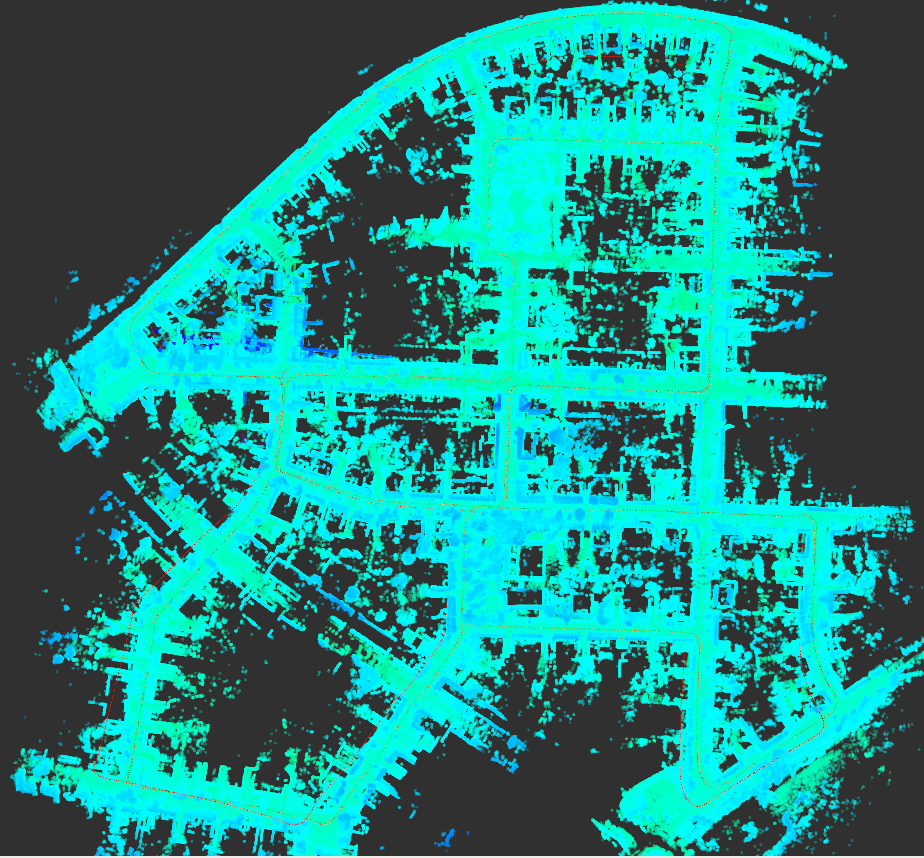 |  | |
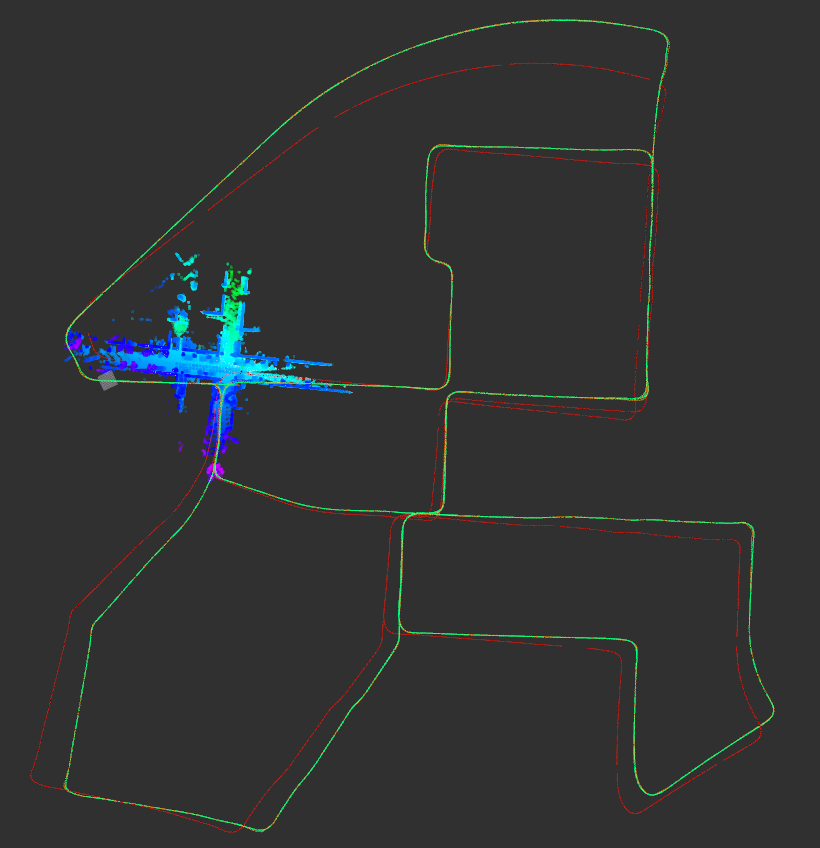 |  | |
| evo_ape | 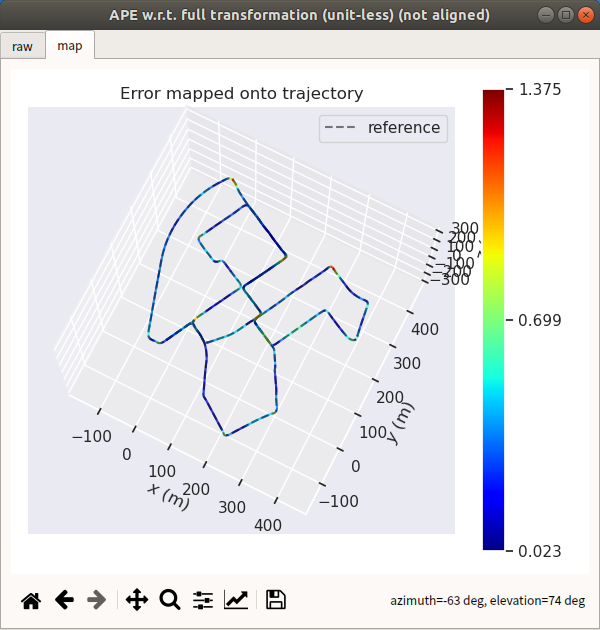 | 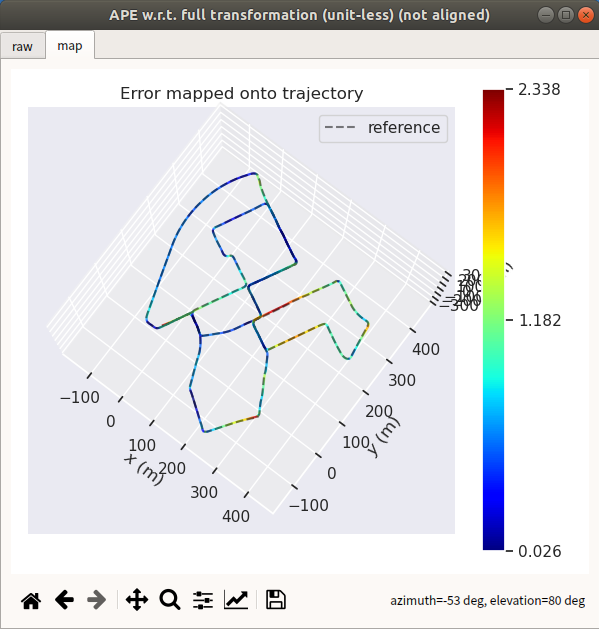 |
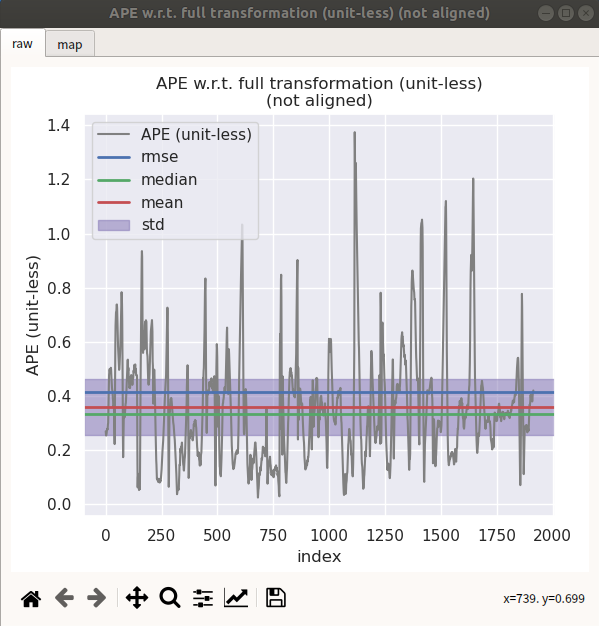 | 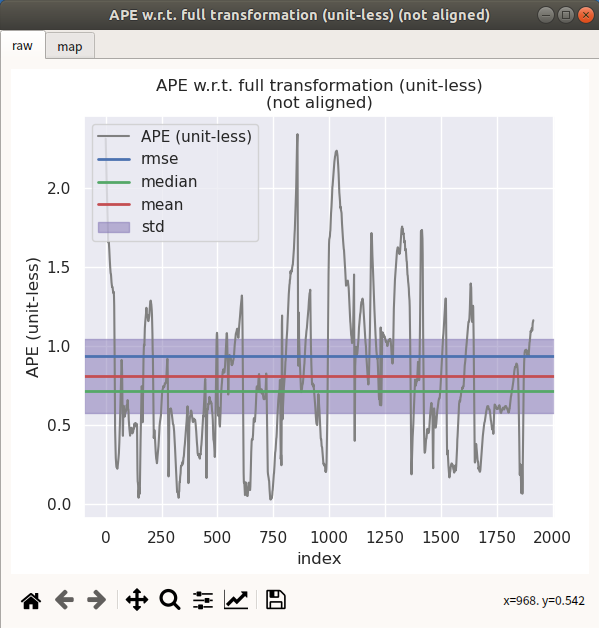 | |
| max 1.375001 mean 0.358914 median 0.332925 min 0.023321 rmse 0.413774 sse 327.693883 std 0.205887 | max 2.338323 mean 0.807955 median 0.710029 min 0.025905 rmse 0.935937 sse 1676.620677 std 0.472425 |
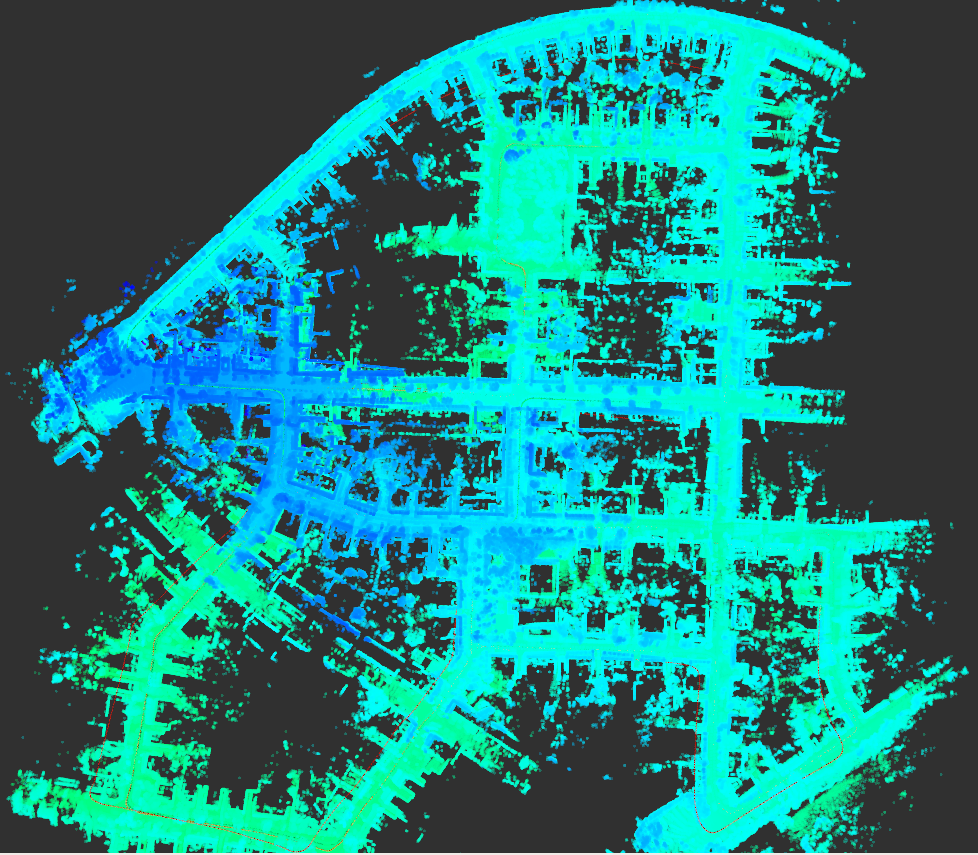
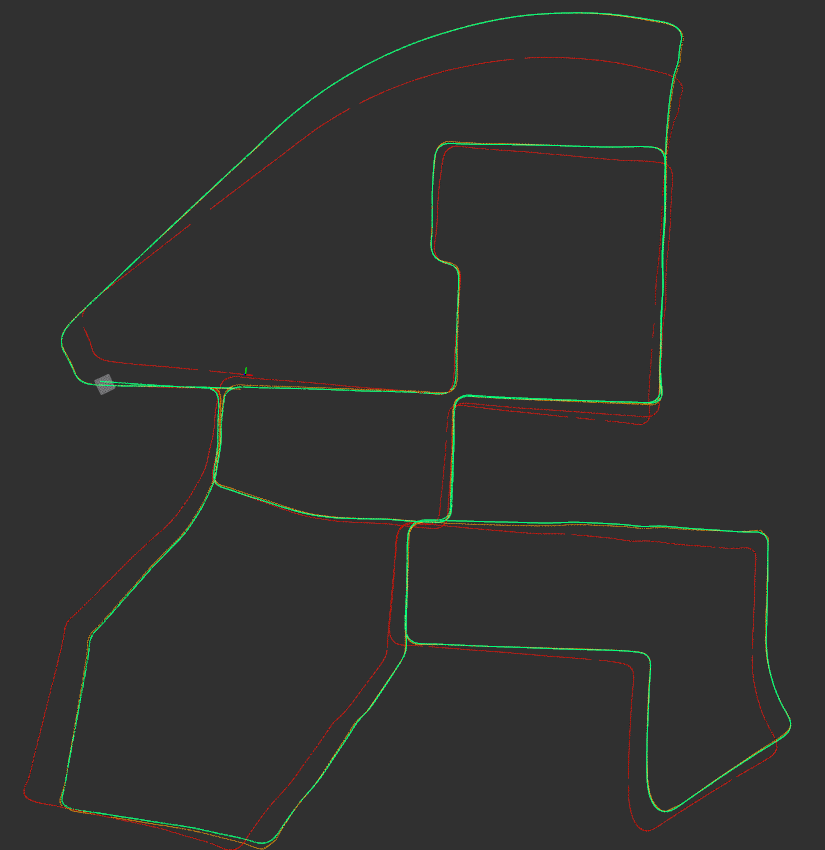
3.3 使用课程推导的PPT公式
| no used imu_pre | used imu_pre | |
|---|---|---|
|  | |
| 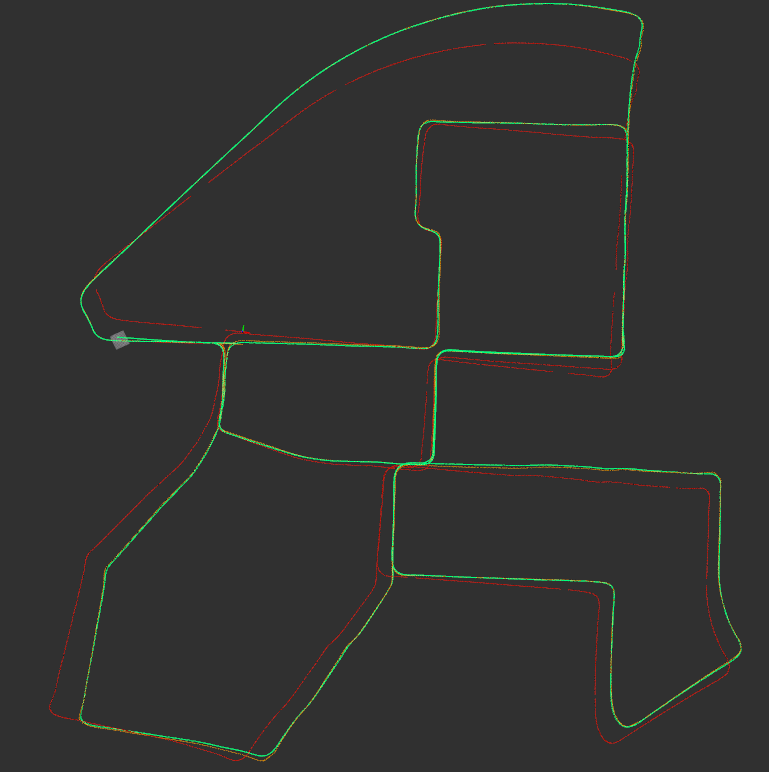 | |
| evo_ape | | 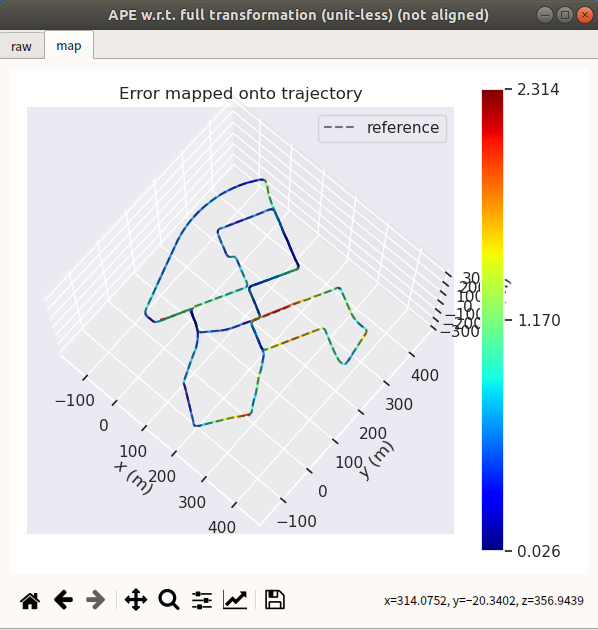 |
| 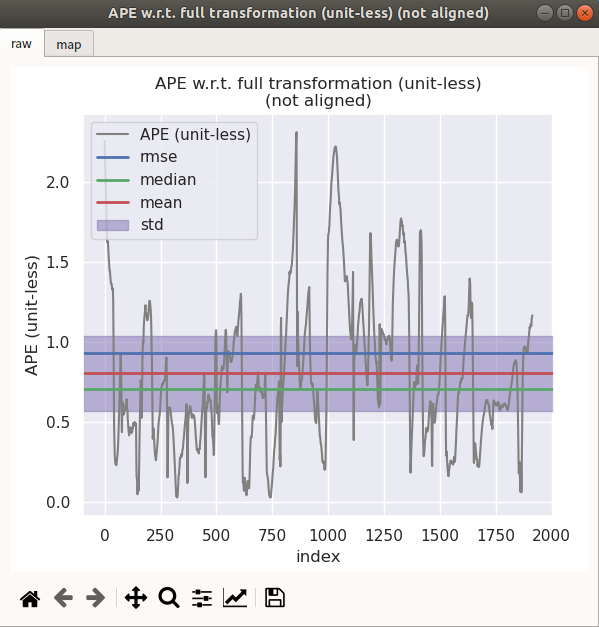 | |
| max 1.375001 mean 0.358914 median 0.332925 min 0.023321 rmse 0.413774 sse 327.693883 std 0.205887 | max 2.314255 mean 0.803588 median 0.704937 min 0.025532 rmse 0.930225 sse 1656.221045 std 0.468578 |
3.4 结论
加入imu_pre 后,在精度上并没有太大的优化,推测可能是kitti数据自身存在误差。但使用因子图融合的方法,比laser_odom 精度要高
4.推导融合编码器时预积分公式的推导(方差递推、残差对状态量雅克比、bias更新)
此部分推导,主要参考张松鹏的推导过程
注意:
1.为什么imu需要做预积分,而雷达不需要做,编码器需要做预积分吗?
imu、编码器获取都是载体系(body)下的测量值,每次积分都需要转换到w系下,需要重新积分,使用预积分的方法,可以大大降低不必要的重复计算。雷达获取的是两帧点云间的位姿,不需要做转换。
2.编码器提供的是二维测量,能够反馈较为准确的位置信息。imu能反馈角速度和线加速度信息,通过对角速度进行积分可获相对旋转角度,通过对线加速度积分可获得相对位移,但使用imu积分得到的相对位移发散问题比较严重。故在imu+编码器融合的方法,可选取 imu提供p,imu提供q、v的方法进行融合。
edited by kaho 2022.3.10
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









