







雷达安装在车辆正前方,左右偏移不超过600mm,离地高度295~800mm。
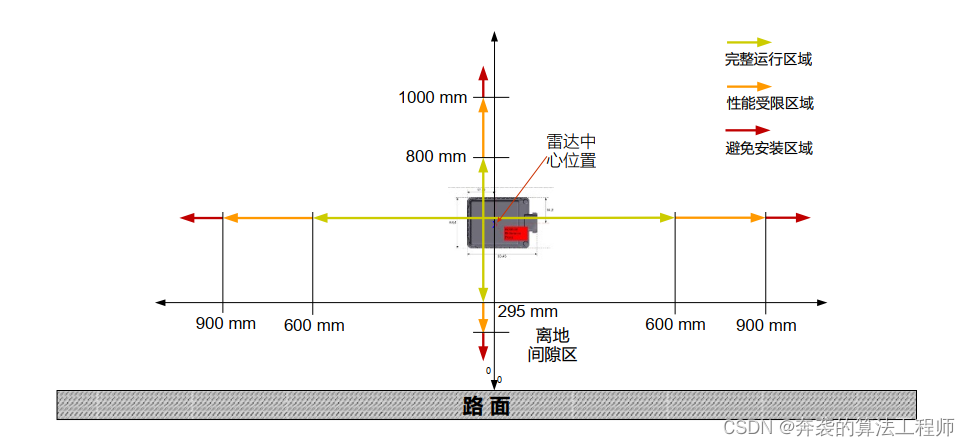
图 1雷达安装位置
如果安装区域超出推荐范围,则会影响雷达正常工作。同时需保证雷达视场范围内无遮挡,否则同样会影响雷达正常工作。
理想情况下,雷达平面应与车辆行进方向垂直,但由于安装过程中的误差,雷达的方位角(Yaw angle、α)、俯仰角(Pitch angle、β)和滚转角(Roll angle、γ)与预期存在一定的偏差,因此都需要标定。

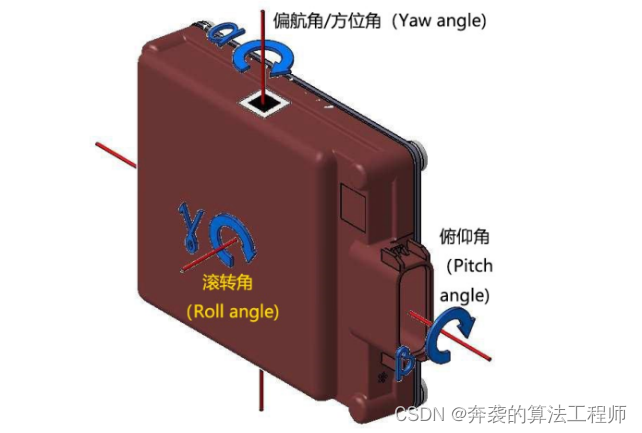
图 2安装偏角示意图
俯仰角和滚转角用小尺寸的水平尺即可校准垂直和水平,如下图所示。
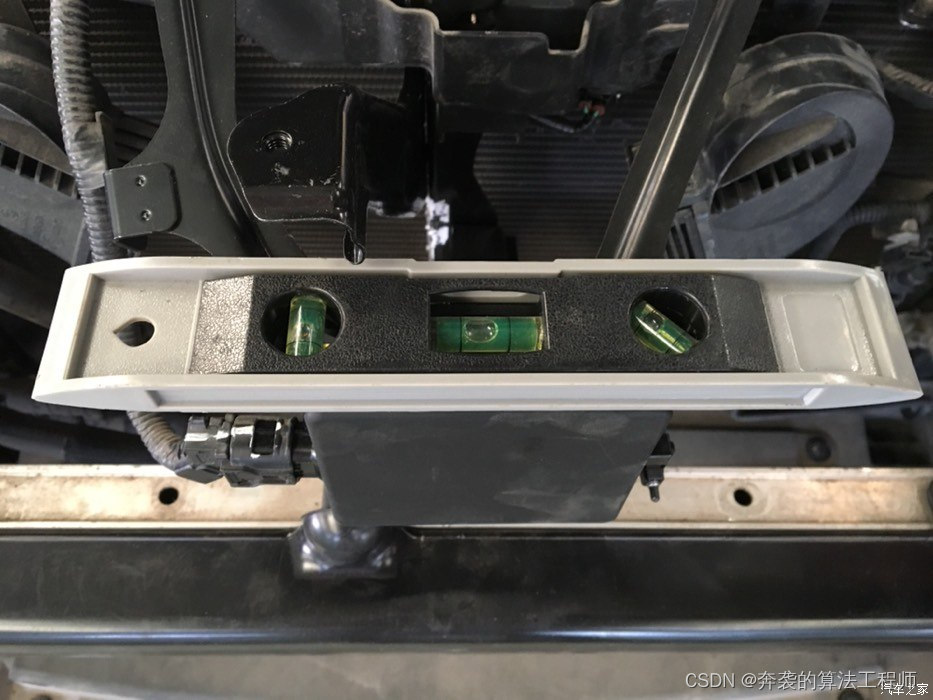
图 3 水平尺校准俯仰角和滚转角
偏航角(α)则需要使用角反射器等设备标定。如下图,安装雷达的车辆停在水平地面上。根据车身确定车辆行进方向,在车辆正前方5~20m确定测试区域(直线),与行进方向垂直;将角反射器调整到与雷达相同高度,选择多个点放置角反射器并通过雷达读取角度值,根据多个点的数据拟合的直线斜率和夹角θ,最终确定偏航角。

图 4 标定示意图
偏航角由下式确定:
α = 90° - θ
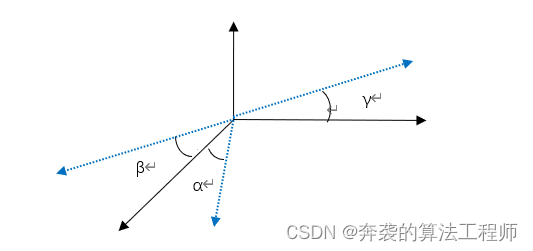
图 5 雷达偏航角标定原理图
雷达标定精度和场地以及选取的皮尺、水平尺等工具相关,考虑使用高精度、高灵敏度的激光水平仪保证车身和角反等标定工具的位置,以得到准确的标定结果。
雷达在行进过程中,满足一定条件,会进行自校准。一般要求在平坦道路上匀速直线行驶,车速大于30kph,时间超过10min,则雷达能自动校准,无需标定。由于自动校准的角度范围有限,一般不超过2deg,因此要求安装误差小于2deg。
雷达自动校准的原理和方法可参考这篇论文《前向毫米波雷达系统自动校准功能》,作者朱龙,下图为原理论述。
图 6 雷达自动校准原理
综上,前向毫米波雷达在安装时保证位置和角度精度,并且经过测试道路完成自动校准,即可正常工作。若需检验自动校准后角度精度,可按照角度标定方法测算。
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











