







 该专栏为热销专栏榜 第10名
该专栏为热销专栏榜 第10名伺服通过飞锯功能和主轴实现同步运动。即主轴是曲柄滑块,从轴是导轨伺服,需要在切面保持速度同步。采用飞锯功能,本文讲解其实现过程。
伺服通过飞锯功能和主轴实现同步运动。即主轴是曲柄滑块,从轴是导轨伺服,需要在切面保持速度同步。采用飞锯功能,本文讲解其实现过程。
-
IO扫描
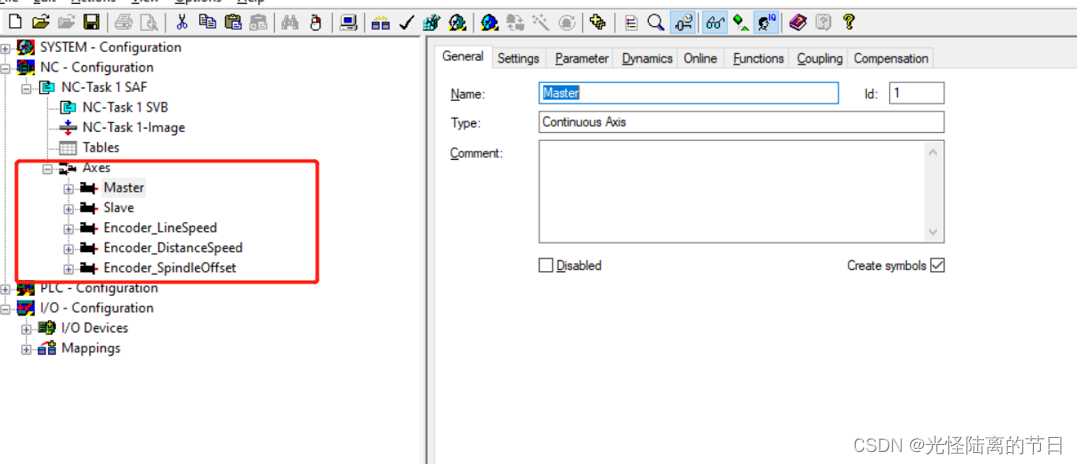
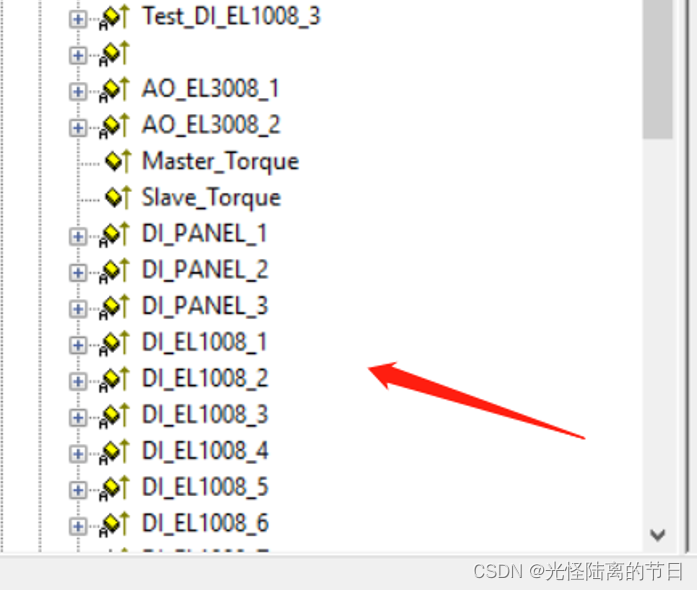
首先扫描IO,配置主轴和从轴的信息,并设置线位置、线路程、主轴偏置角度的编码器轴如下所示:
-
扫描周期的设定
需要设置1ms的扫描周期,如下所示
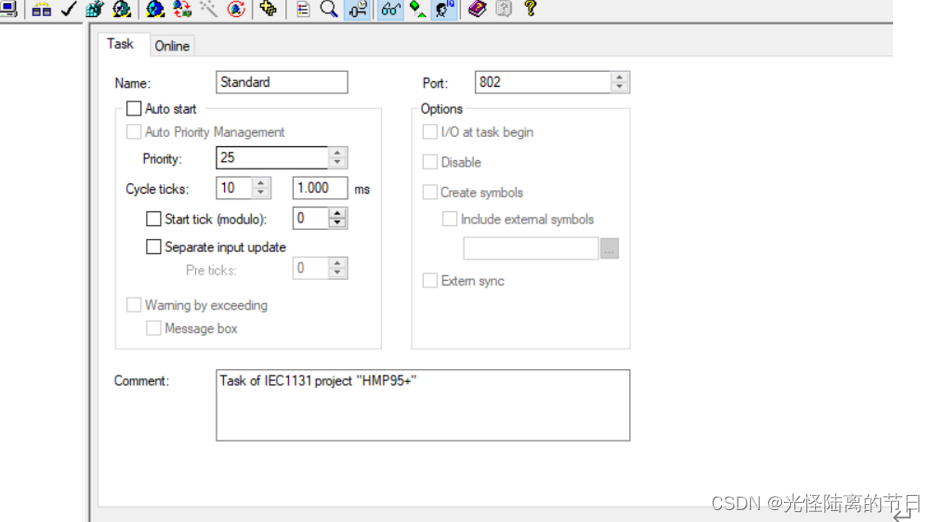
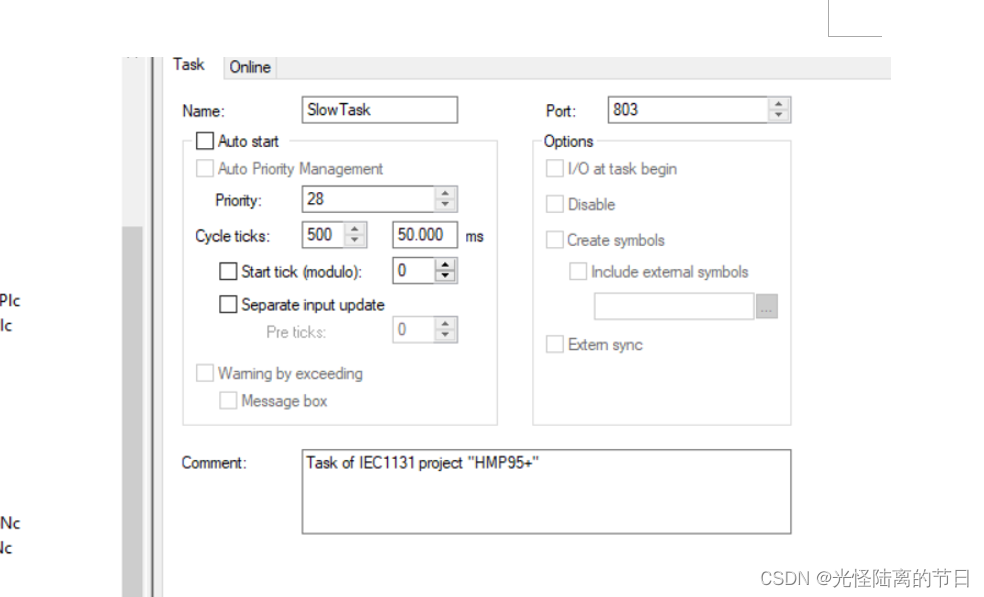
将飞锯扫描任务设为最高,并且其它任务引脚放到后面的任务

伺服通过飞锯功能和主轴实现同步运动。即主轴是曲柄滑块,从轴是导轨伺服,需要在切面保持速度同步。采用飞锯功能,本文讲解其实现过程。
伺服通过飞锯功能和主轴实现同步运动。即主轴是曲柄滑块,从轴是导轨伺服,需要在切面保持速度同步。采用飞锯功能,本文讲解其实现过程。
IO扫描
首先扫描IO,配置主轴和从轴的信息,并设置线位置、线路程、主轴偏置角度的编码器轴如下所示:
扫描周期的设定
需要设置1ms的扫描周期,如下所示
将飞锯扫描任务设为最高,并且其它任务引脚放到后面的任务
 1579
1579

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





 订阅专栏 解锁全文
订阅专栏 解锁全文























