







写在前面了:2022.5.27 ,断更了,中期答辩后去另一篇文章了。。。。
2022.6.14,修改之前错误的意识
1.我的环境
双系统下:ubuntu 20 LTS ;ROS 20;opencv4:pangolin、g2o、ceres等等。
数据集:自己录的rgbd+imu然后加上自己标定:大概就是绕室内一圈。
2.我的进展
一、 vo的构建:参考orbslam2以及slam14讲,从帧间匹配到局部地图跟踪再加上一些小策略,着手搭建了一个小小的里程计(暂时无回环)。显示Tcw(w->c的坐标系)<耗时蛮久,后续会继续优化和完善>
二、融合imu以及camera:
时间:2022年4月头开始到现在(时间略微有点久)
小目标:先粗略的显示出imu较为正确的路径,然后优化并且耦合到视觉里头进行优化
目前 历程:理论的学习->懵懂的理论加上看vins代码->较熟悉的理论加上懵懂的vins代码->较熟悉的理论加上熟悉的vins代码->....
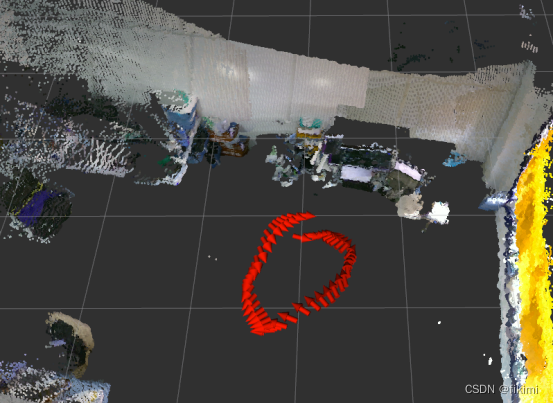
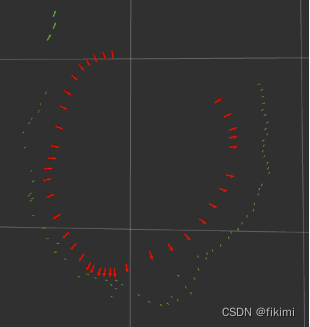
大概一个两个关键帧之间的预计分量包含了二十几到三十个几的imu值,同时还传递了关键帧的Tcw。预积分的值算出来之后,就马上对显示的坐标进行对齐。
5.06的 实验结果图
6.14 将预积分值作为观测量添加至优化当中,去共同维护位姿(后续更新)
3.小技巧学习和注意
(1)小技巧:有些比较简单的数据接口使用py文件,在py文件中,同一个功能包下面或许有其他节点,我使用了py调用launch来尽量节约窗口;
import roslaunch
uuid = roslaunch.rlutil.get_or_generate_uuid(None, False)
roslaunch.configure_logging(uuid)
tracking_launch = roslaunch.parent.ROSLaunchParent(
uuid, ["launch path"])
tracking_launch.start()
/*code and so no */
tracking_launch.shotdown()(2)注意:在写代码的时候要注意坐标的不同,然后把要显示的坐标也要对齐来!
pcl库和opencv冲突:在所有include和src文件中,pcl库头文件都要再opencv前面
ceres的编译问<另外的博客有记录这个坑>















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









