







 本文探讨了三角测量原理在视觉定位中的应用,通过相似三角形理论,利用目标与传感器间的距离及角度信息,计算目标点的三维坐标。介绍了如何通过已知距离和角度求解目标距离,并进一步获取其坐标。
本文探讨了三角测量原理在视觉定位中的应用,通过相似三角形理论,利用目标与传感器间的距离及角度信息,计算目标点的三维坐标。介绍了如何通过已知距离和角度求解目标距离,并进一步获取其坐标。
作者:乐少行
链接:https://www.zhihu.com/question/27719009/answer/94892764
来源:知乎
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
三角测量原理就是相似三角形,有多种变形。
我想你的机器人定位方法用的应该指的是视觉定位吧?所以关键在于求出目标和传感器间的距离d,然后通过自己建立的世界坐标系,利用相似关系可以得到目标点的三维坐标。
--------------------------------------------------------------
下面讨论利用三角函数来描述的三角测量法。
(下图和公式从维基百科搬运,我稍微再补充一下。)
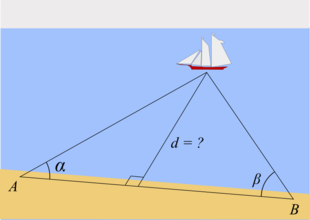
如图所示的问题比较简单,要求船离海岸的距离d。我们可以把船视为质点C,并假设ABC在同一水平面内,
我们知道,已知两个角和共用边可以唯一确定一个三角形。图中AB间距离确定为l,∠CAB=α,∠CBA=β。l、α、β均已知,那么这个三角形已经确定了。
那么很容易列出下面的关系式
With l being the distance between A and B we have
Using the trigonometric identities tan α = sin α / cos α and sin(α + β) = sin α cos β + cos α sin β, this is equivalent to:

therefore:

现在d有了,假设C到AB的垂足为D。AD=d/tanα。如果以A点为原点建立坐标系,AB为x轴正向,DC为y正方向,z正方向向上。那么C点三维坐标就是(d/tanα, d, 0)。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









