






1.服务通信原理介绍
服务通信较之于话题通信更简单些,理论模型如下图所示,该模型中涉及到三个角色:
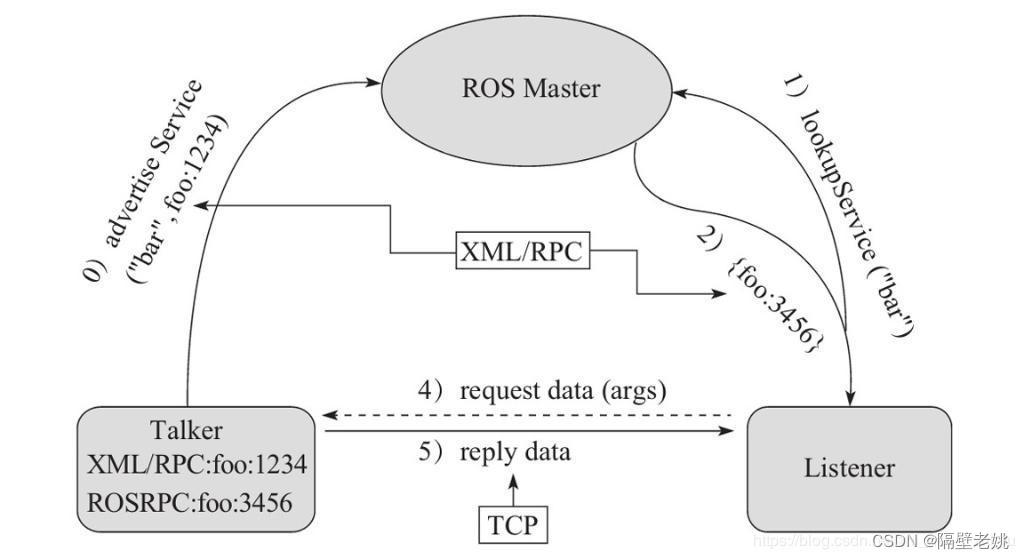
- ROS master(管理者)
- Server(服务端)
- Client(客户端)
ROS Master 负责保管 Server 和 Client 注册的信息,并匹配话题相同的 Server 与 Client ,帮助 Server 与 Client 建立连接,连接建立后,Client 发送请求信息,Server 返回响应信息。
整个流程由以下步骤实现:
1.Server注册
Server 启动后,会通过RPC在 ROS Master 中注册自身信息,其中包含提供的服务的名称。ROS Master 会将节点的注册信息加入到注册表中。
2.Client注册
Client 启动后,也会通过RPC在 ROS Master 中注册自身信息,包含需要请求的服务的名称。ROS Master 会将节点的注册信息加入到注册表中。
3.ROS Master实现信息匹配
ROS Master 会根据注册表中的信息匹配Server和 Client,并通过 RPC 向 Client 发送 Server 的 TCP 地址信息。
4.Client发送请求
Client 根据步骤2 响应的信息,使用 TCP 与 Server 建立网络连接,并发送请求数据。
5.Server发送响应
Server 接收、解析请求的数据,并产生响应结果返回给 Client。
注意: 1.客户端请求被处理时,需要保证服务器已经启动; 2.服务端和客户端都可以存在多个。
2.编辑相应文件
2.1 自定义srv文件
服务通信中,数据分成两部分,请求与响应,在 srv 文件中请求和响应使用—分割,具体实现如下:
功能包下新建 srv 目录,添加 AddInts.srv 文件,内容:
# 客户端请求时发送的两个数字
int32 num1
int32 num2
---
# 服务器响应发送的数据
int32 sum
2.2 配置CMakeLists.txt
在自定义的包的CMakeLists.txt文件中添加和service相关的配置块,需要配置message相关的配置块,之前已经配置便不再赘述,可参考上篇,添加以下内容
add_service_files(
FILES
AddInts.srv
)
注意:service配置块要在message配置快之前
2.3 编辑服务端实现
在自定义包basic_correspondence的src目录下添加add_ints_server_p.py,编辑以下内容
#! /usr/bin/env python
"""
需求:
编写两个节点实现服务通信,客户端节点需要提交两个整数到服务器
服务器需要解析客户端提交的数据,相加后,将结果响应回客户端,
客户端再解析
服务器端实现:
1.导包
2.初始化 ROS 节点
3.创建服务对象
4.回调函数处理请求并产生响应
5.spin 函数
"""
# 1.导包
import rospy
from basic_correspondence.srv import AddInts,AddIntsRequest,AddIntsResponse
# 回调函数的参数是请求对象,返回值是响应对象
def doReq(req):
# 解析提交的数据
sum = req.num1 + req.num2
rospy.loginfo("提交的数据:num1 = %d, num2 = %d, sum = %d",req.num1, req.num2, sum)
# 创建响应对象,赋值并返回
# resp = AddIntsResponse()
# resp.sum = sum
resp = AddIntsResponse(sum)
return resp
if __name__ == "__main__":
# 2.初始化 ROS 节点
rospy.init_node("addints_server_p")
# 3.创建服务对象
server = rospy.Service("AddInts",AddInts,doReq)
# 4.回调函数处理请求并产生响应
# 5.spin 函数
rospy.spin()
2.4 编辑客户端实现
在自定义包basic_correspondence的src目录下添加add_ints_client_p.py,编辑以下内容
#! /usr/bin/env python
"""
需求:
编写两个节点实现服务通信,客户端节点需要提交两个整数到服务器
服务器需要解析客户端提交的数据,相加后,将结果响应回客户端,
客户端再解析
客户端实现:
1.导包
2.初始化 ROS 节点
3.创建请求对象
4.发送请求
5.接收并处理响应
优化:
加入数据的动态获取
"""
#1.导包
import rospy
from basic_correspondence.srv import *
import sys
if __name__ == "__main__":
#优化实现
if len(sys.argv) != 3:
rospy.logerr("请正确提交参数")
sys.exit(1)
# 2.初始化 ROS 节点
rospy.init_node("addints_client_p")
# 3.创建请求对象
client = rospy.ServiceProxy("AddInts",AddInts)
# 请求前,等待服务已经就绪
# 方式1:
# rospy.wait_for_service("AddInts")
# 方式2
client.wait_for_service()
# 4.发送请求,接收并处理响应
# 方式1
# resp = client(3,4)
# 方式2
# resp = client(AddIntsRequest(1,5))
# 方式3
req = AddIntsRequest()
# req.num1 = 100
# req.num2 = 200
#优化
req.num1 = int(sys.argv[1])
req.num2 = int(sys.argv[2])
resp = client.call(req)
rospy.loginfo("响应结果:%d",resp.sum)
2.5 配置CMakeList.txt文件
在自定义包的CMakeLists.txt文件的catkin_install_python配置块添加这两个文件
catkin_install_python(PROGRAMS
src/add_ints_server_p.py
src/add_ints_client_p.py
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
2.6 编译
在工作区根目录执行catkin_make进行编译
3.6 启动服务
在启动前需要先配置PYTHONPATH,将自定义包编译生成的python包路径添加到导包路径中
export PYTHONPATH=/opt/ros/noetic/lib/python3/dist-packages:{自定义工作空间绝对路径}/devel/lib/python3/dist-packages/
启动服务
roscore # 需要先启动ros msater
rosrun basic_correspondence person_talker.py
rosrun basic_correspondence person_listener.py















 233
233

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









