





# 汽车十大传感器

01 传感器的定义
所谓传感器是来自“感觉”一词,根据GB7665-2005,传感器(Transducer/Sensor)的定义为:
能感受被测量并按照一定的规律转换成可用输出信号的器件或装置,通常由敏感元件和转换元件组成。

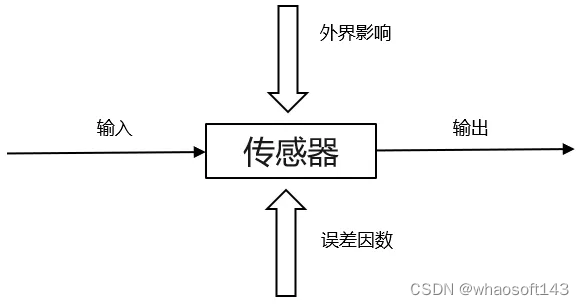
传感器组成框图
- 敏感元件指传感器中能直接感受或响应被测量的部分,是传感器的核心,它的作用是直接感受被测物理量,并将信号进行必要的转换输出。
- 转换元件指传感器中能将敏感元件感受或响应的被测量转换成适于传输或测量的电信号部分。
- 基本转换电路是一些能把敏感器件或转换元件输出的电信号转换为便于显示、记录和处理等有用的电信号的装置。
- 被测量传感器输入量,是传感器命名和分类的重要依据。如非电物理量:温度、湿度、压力、位移、流量、加速度、光等
- 输出量含有原始信号,且为便于接收与处理的信号形式。当输出为规定的标准信号时,则称为变送器(transmitter)。
02 传感器的图形符号
及命名法/代码
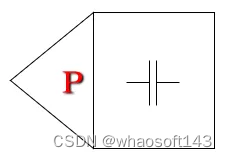
国标GB/T 14479-93规定传感器图用图形符号表示方法:

正方形表示转换元件,三角形表示敏感元件;X 表示被测量符号;* 表示转换原理。
如:电容式压力传感器
国标GB/T 7666-2005规定了传感器的命名方法:一种传感器产品的名称,应由主题词加四级修饰语构成。
- 主题词-传感器;
- 第一级修饰语-被测量,包括修饰被测量的定语;
- 第二级修饰语-转换原理,一般可后续以“式”字;
- 第三级修饰语-特征描述,指必须强调的传感器结构、性能、材料特征、敏感元件以及其他必要的性能特征,一般可后续以“型”字。
- 第四级修饰语-主要技术指标(量程、测量范围、精度等)。
例:传感器,压力,压阻式,[单晶]硅,600kPa。
注:当对传感器的产品名称命名时,除第一级修饰语外,其他各级可视产品的具体情况任选或省略。
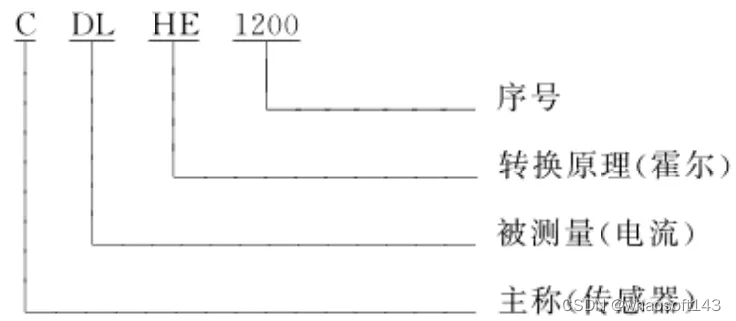
同时,国标GB/T 7666-2005规定了传感器代号标记方法:规定用大写汉语拼音字母(或国际通用标志)和阿拉伯数字构成传感器完整的代号。
传感器的完整代码应包括以下四部分:
- 主称(传感器):用汉语拼音字母“C”标记。
- 被测量:用其一个或两个汉字汉语拼音的第一个大写字母标记,具体参考GB/T 7666-2005中的规定。
- 转换原理:用其一个或两个汉字汉语拼音的第一个大写字母标记,具体参考GB/T 7666-2005中的规定。
- 序号:用阿拉伯数字标记,序号可表征产品设计特征、性能参数、产品系列等。序号及其内涵可由传感器生产厂家自行决定。
例:霍尔式电流传感器
03 传感器的特性与指标
3.1 传感器的静态特性
参考GB/T18459-2001,静态特性表示被测量处于不变或缓慢情况下,输出与输入之间的关系。也就是当输入量为常量,或变化极慢时,这一关系被称作静态特性。
静态特性曲线可通过实际测试获得,为了标定和数据处理的方便,希望得到线性关系,可采用硬件和软件的补偿进行线性化处理,当非线性误差不太大的情况下,通常采用直线拟合的方法线性化。
通常评价静态特性的指标如下:
1、线性度:在规定条件下,传感器测量曲线(校准曲线)与拟合直线间最大偏差与满量程(Full Scale)输出值的百分比称为线性度。
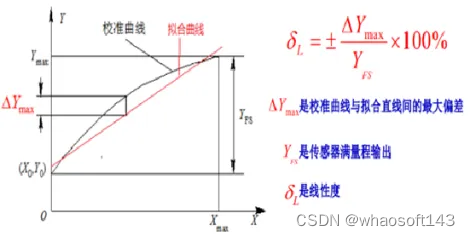
传感器线性度
注:线性度与拟合直线为基准,拟合直线不同,线性度不同。
2、灵敏度:传感器的灵敏度是指到达稳定工作状态时,输出变化量与引起此变化的输入变化量之比。
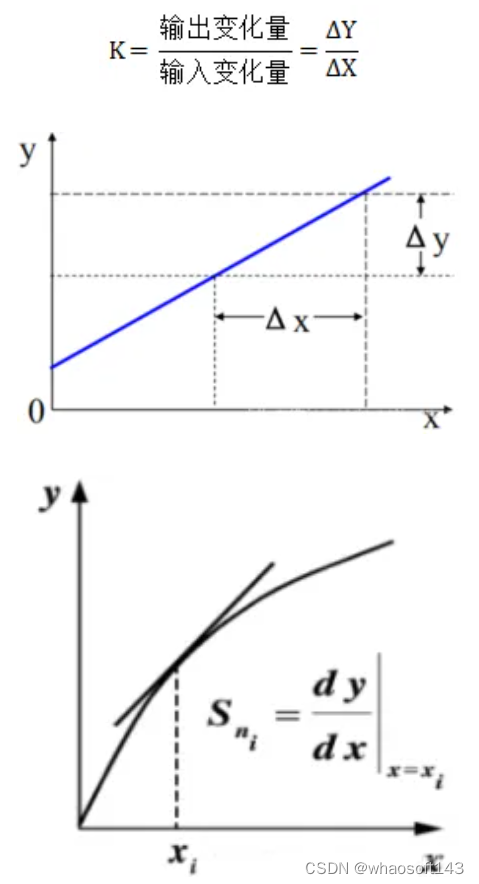
注:非线性传感器的灵敏度用dy/dx表示,其数值等于所对应的最小二乘法拟合直线的斜率。
3、分辨力:传感器在规定的测量范围内所能检测出的被测输入量的最小变化值。有些时候,也会用该值相对满量程的百分数表示,此时则称为分辨率。(满量程=最大量程-最小量程)
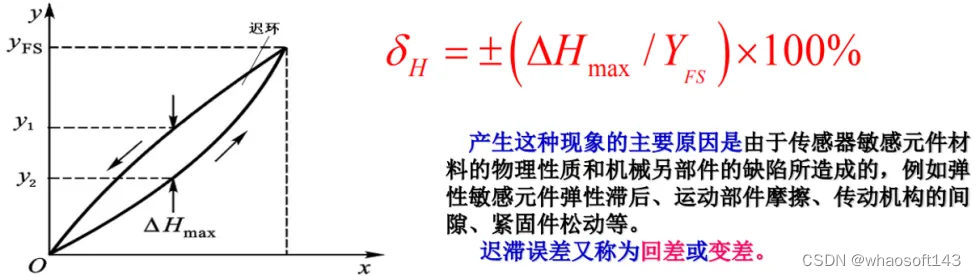
4、迟滞(回差):在相同工作条件和量程范围内,同一次测量中对应同一输入量的正行程和反行程其输出值间的最大偏差。
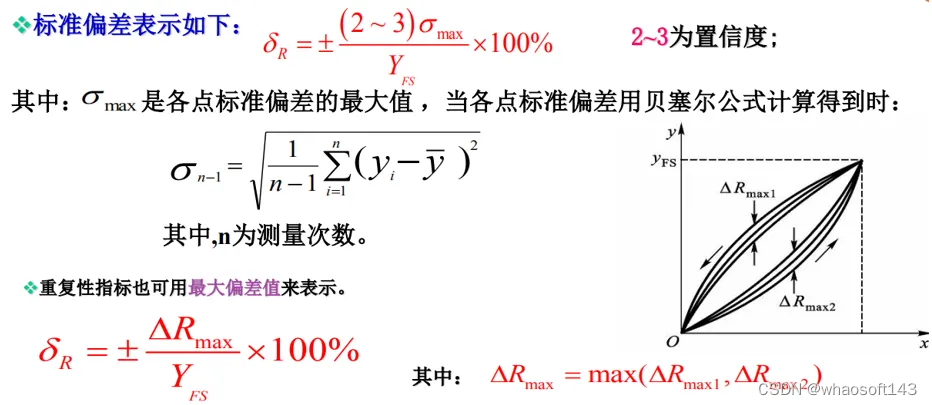
5、重复性:在同一工作条件下,输入量按同一方向在全测量范围内连续变动多次所得特性曲线的不一致性。数值上用各测量值正、反行程标准差的两倍或三倍与满量程的百分比。
注:迟滞和重复性的差异:
- 迟滞反映传感器机械结构和制造工艺上的缺陷,如轴承摩擦、间隙、螺丝松动。元件腐蚀或碎裂及积尘等。
- 重复性反映测量结果偶然误差的大小,而不表示与真值之间的差别。有时重复性很好,但可能远离真值。
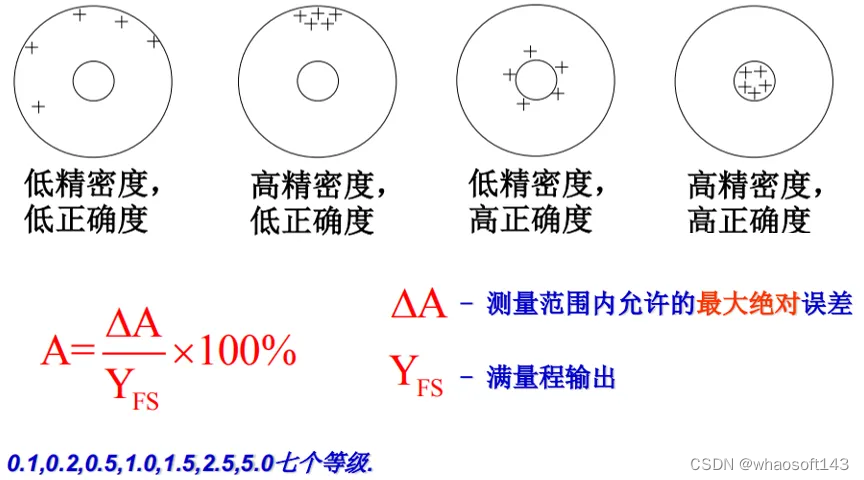
6、精度(静态准确度)
精度的指标:精密度、准确度、精确度
- 精密度:说明测量结果的分散性(随机误差)
- 准确度:说明测量结果偏离真值大小的程度(系统误差)
- 精确度:精密度和准确度的综合(极限误差)
工程中,为了表示测量结果的可靠程度,引入精确度等级概念,用A表示。
7、其他特性
- 阈值:从输出看能测出的输入量最小变化值,实际上是零位附近的灵敏度。
- 稳定性和温度稳定性:稳定性表示传感器在较长时间内保持其性能参数的能力,稳定性可用相对误差或绝对误差表示,表示方式如:XX个月不超过 %满量程输出。
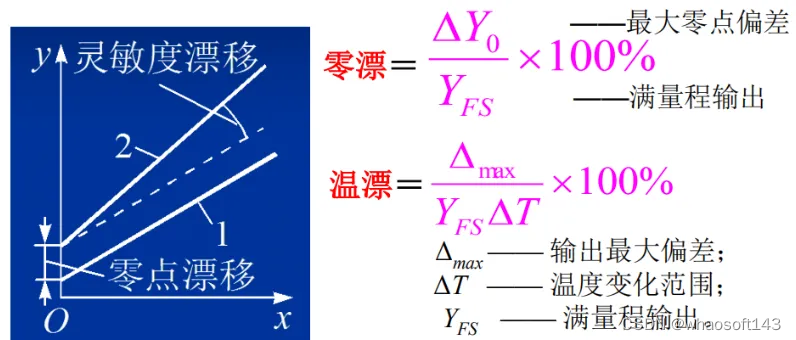
- 漂移:传感器在输入量不变的情况下,输出量随时间变化的现象。
Ø 传感器不因输入的原因而发生的变化
Ø 零点漂移和灵敏度漂移
Ø 时漂、温漂
时间漂移是指在规定的条件下,零点或灵敏度随时间的缓慢变化。
温度漂移为环境温度变化而引起的零点或灵敏度漂移。
3.2 传感器的动态特性
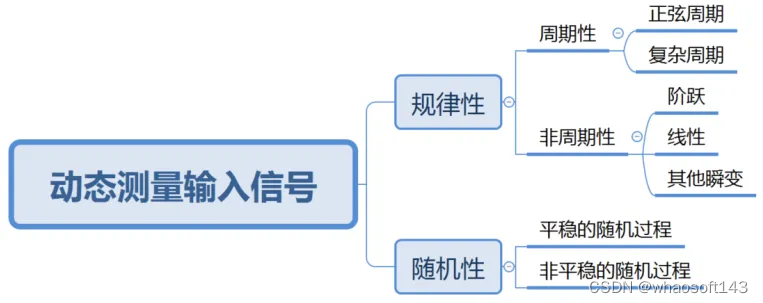
- 当输入量随时间变化时,输入与输出间的关系(动态量指周期信号、瞬变信号或随机信号)。
- 动态特性取决于传感器本身,另一方面也与被测参量的变化形式有关。
对数幅频特性:将各种频率不同而幅值相等的正弦信号输入传感器,其它输出正弦信号的幅值、相位与输入信号频率之间的关系
小 结:
- GB/T 7665-2005规定了传感器的产品名称和性能特性术语。
- GB/T 7666-2005规定了传感器的命名方法、代号标记方法、代号。
- GB/T 14479-1993规定了传感器的图用图形符号和表示规则。
- GB/T 18459-2001 规定了一般传感器主要静态指标的定义和计算方法。
04 传感器相关通讯协议
CAN (Controller Area Network), LIN (Local Interconnect Network), FlexRay, MOST (Media Oriented Systems Transport), PWM (Pulse Width Modulation), PSI5 (Precision Sensor Interface 5), 和 SPI (Serial Peripheral Interface) ,SENT (Single Edge Nibble Transmission)和 Ethernet 是在汽车传感器通讯协议中常用的几种技术,它们各自有不同的应用场景和特点:
1、CAN (Controller Area Network):
- 应用:CAN 是汽车网络中最常用的通讯协议之一,适用于各种类型的传感器,包括速度、温度、压力和转向角度传感器。
- 特点:它支持多主控通讯,具有错误检测和校正功能,适合于实时性和可靠性要求较高的应用。
2、LIN (Local Interconnect Network):
- 应用:LIN 通常用于成本敏感和速度要求较低的传感器和控制单元,如车窗、座椅调节和简单照明控制。
- 特点:LIN 协议简单、成本低,适合于较低速度和较低复杂度的应用。
3、FlexRay:
- 应用:FlexRay 用于需要高可靠性和实时性的安全关键系统,如电子稳定控制系统(ESC)、防抱死制动系统(ABS)和自动驾驶系统。
- 特点:FlexRay 支持高速数据传输,具有高可靠性和确定性,适用于要求严格的实时应用。
4、MOST (Media Oriented Systems Transport):
- 应用:MOST 主要用于车载娱乐和信息系统,如音频、视频和数据流的传输。
- 特点:MOST 支持高速数据传输,具有时间同步功能,适合于多媒体和信息系统。
5、Ethernet:
- 应用:随着车辆系统变得越来越复杂,以太网开始被用于需要处理大量数据的系统,如高级驾驶辅助系统(ADAS)和自动驾驶技术。
- 特点:以太网支持高速数据传输,具有高带宽和网络扩展性,适用于大数据量和高速通讯需求。
6、PWM (Pulse Width Modulation):
- 应用:PWM 通常用于模拟传感器的输出,如位置或速度传感器。它通过改变脉冲的宽度来表示模拟信号的不同值。
- 特点:PWM 信号简单,抗干扰能力强,适合于长距离传输。但它只能单向传输数据,且数据传输速率相对较低。
7、PSI5 (Precision Sensor Interface 5):
- 应用:PSI5 是一种用于汽车传感器的通讯协议,主要用于速度、位置和角度传感器的数据传输。
- 特点:PSI5 支持高速数据传输,具有错误检测和校正功能,适用于实时性和精确性要求较高的应用。
8、SPI (Serial Peripheral Interface):
- 应用:SPI 通常用于数字传感器和微控制器之间的通讯。它可以用于各种类型的传感器,包括温度、压力和加速度传感器。
- 特点:SPI 支持高速全双工通讯,可以同时发送和接收数据。它需要较少的引脚,但在某些情况下可能需要更多的硬件支持。
9、SENT (Single Edge Nibble Transmission):
- 应用:SENT 用于需要高精度和高可靠性数据传输的汽车传感器,如轮速传感器、位置传感器和压力传感器。
- 特点: SENT 使用单线进行数据传输,支持高分辨率,具有强大的错误检测和校验机制,适合于安全关键系统。
小 结:
这些通讯协议在汽车传感器中的应用取决于传感器的类型、所需的通讯速度、数据完整性要求以及系统的复杂性。例如,CAN 和 LIN 适用于一般的汽车传感器通讯,而 FlexRay 和 Ethernet 更适合于需要高速、高精度数据传输的高级应用。PWM 适合于简单的模拟传感器,而 PSI5、SPI 和 SENT 更适合于需要高速、高精度数据传输的数字传感器。
05 汽车传感器
汽车传感器是把非电信号转换成电信号并向汽车传递各种工况信息的装置。在汽车运行中,汽车传感器能采集车身状态(如温度、压力、位置、转速等)和环境信息,并将采集到的信息转换为电信号传输至汽车的相关控制单元。
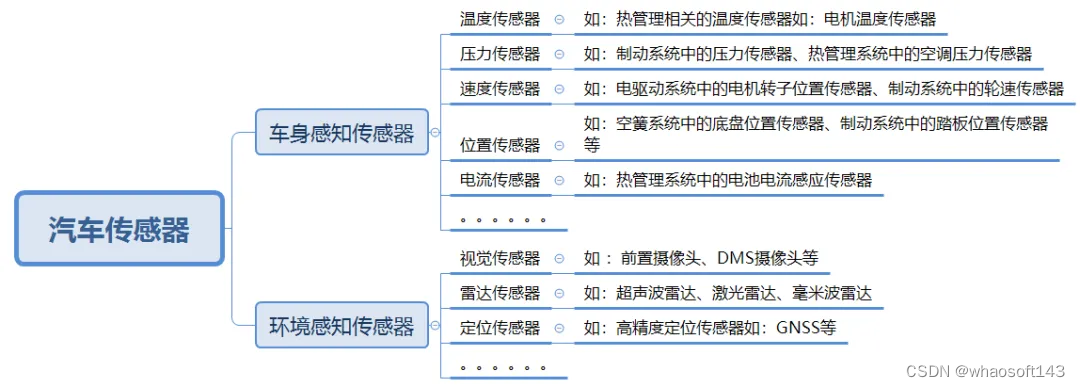
汽车传感器作为信息采集源,根据信息采集内容的不同可分为车身感知传感器和环境感知传感器。
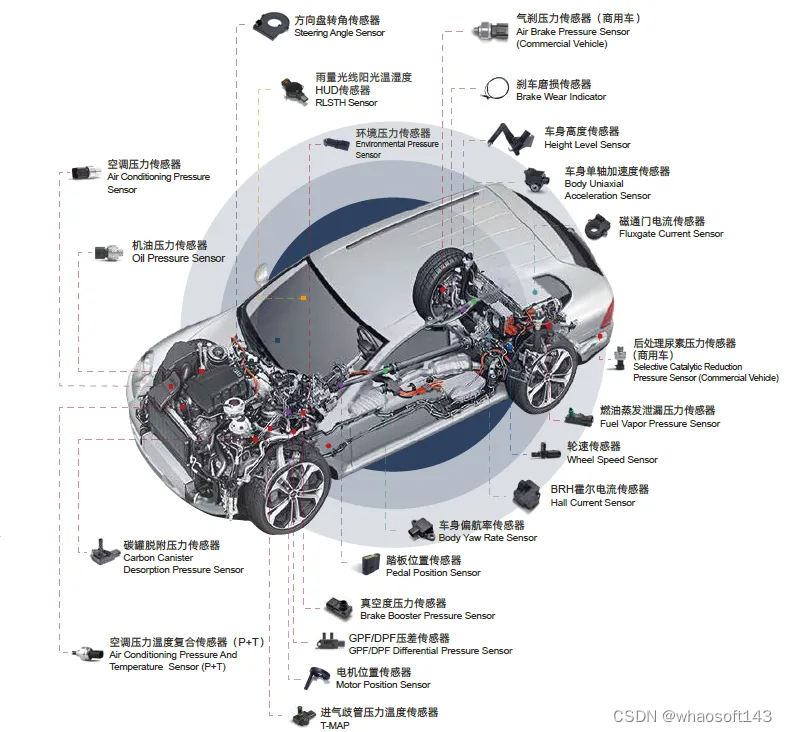
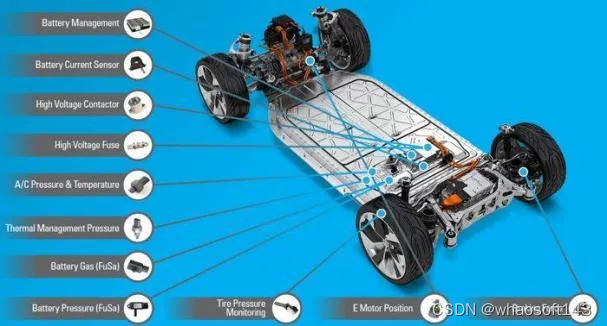
- 车身感知传感器指分布于汽车的动力系统、传动系统、底盘及安全系统及车身舒适性系统等子系统中,用于获取汽车车身信息的基础传感器。车身感知传感器提高了单车自身的信息化水平,使车辆具备感知自身的能力;按照输入的被测量不同主要分为压力传感器、位置传感器、温度传感器、(线)加速度传感器、角(加)速度传感器、空气流量传感器、气体传感器,从工作原理上看这些传感器大都采用MEMS方案。
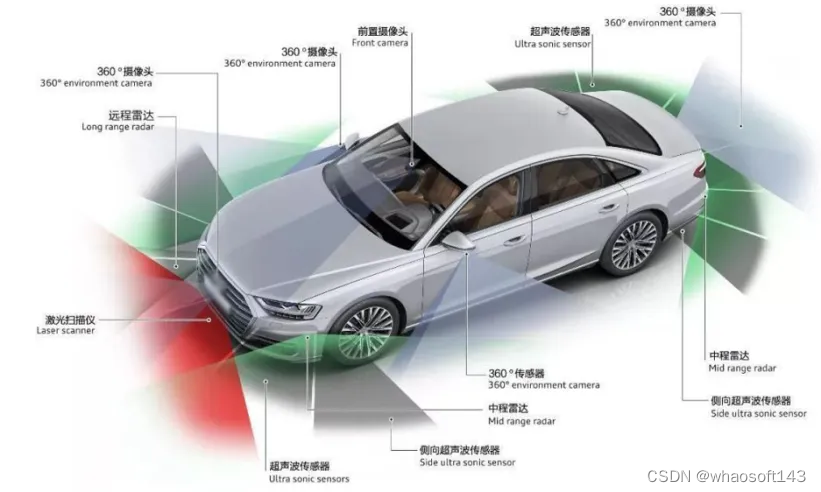
- 环境感知传感器指通过采集、输出汽车周围环境信息以协助汽车实现智能驾驶的汽车传感器。环境感知传感器实现了单车对外界环境的感知能力,帮助汽车计算机获得环境信息并做出规划决策,为车辆智能化驾驶提供支持;环境感知传感器主要分为车载摄像头、超声波雷达、毫米波雷达、激光雷达。
注:MEMS传感器指将微型机械结构、微型传感器、微型执行器、信号处理和控制电路以及接口、通信和电源模块都集成于芯片上的微机电系统。
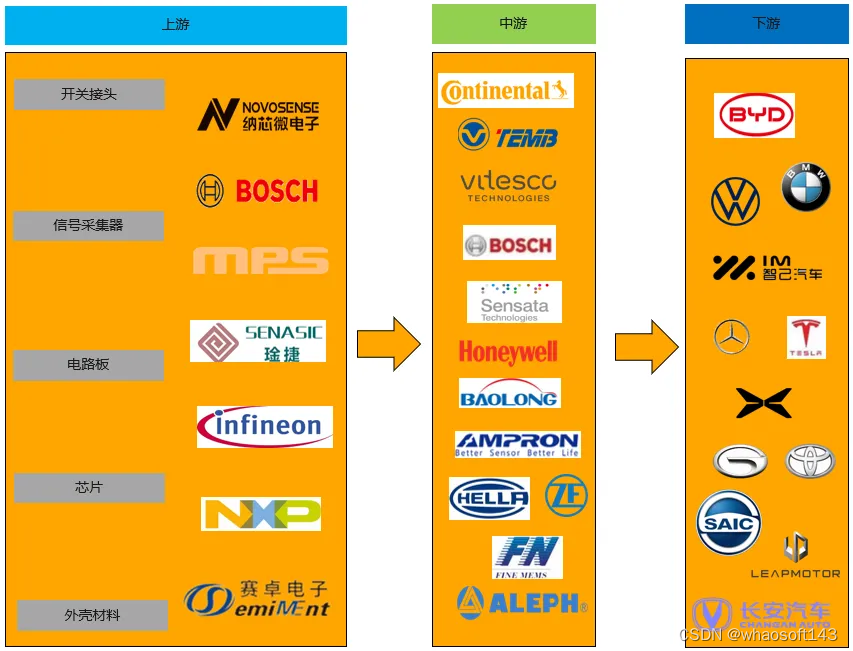
汽车传感器产业链简图
可以看出,当前传感器技术我国仍处于技术追赶阶段,诸如:纳芯微、琻捷电子、保隆、安培龙、华为、森思泰克等芯片、传感器企业打破国外垄断技术,逐步缩短和国外厂商的差距。

注:上图及表格仅为个人观点,如有错误,烦请批评指正
- 博世依托其半导体芯片技术、博世制动、智能驾驶及座舱、无锡车联天下、联合汽车电子UAES(电驱动)、博世华域转向等关键零部件产业布局,产品范围广,供应链齐全,在行业内处于领先地位。

博世传感器布局
- Conti大陆集团依托其全球化的产业布局,在原有燃油车传感器产业上,布局了诸如:轮速传感器、曲轴位置传感器、12V蓄电池管理传感器、配合空簧使用的底盘位置传感器和加速度传感器,在新能源汽车领域,布局电驱动的转子位置传感器和动力电池的电流传感器模块,与电驱动相关的电机变速器速度传感器、电机转子速度传感器、电机转子位置传感器。同时,立足于长春研发中心和配套工厂设施,与曲阜天博合资成立了陆博电子、在连云港建立了合资工厂,同时陆博电子和国内芯片企业纳芯微双方就乘用车关键零部件轮速传感器本土化项目签署产品合作协议,开拓在技术与安全领域的深度合作,旨在共同推进我国汽车芯片的国产化进程,保障供应链稳健安全。
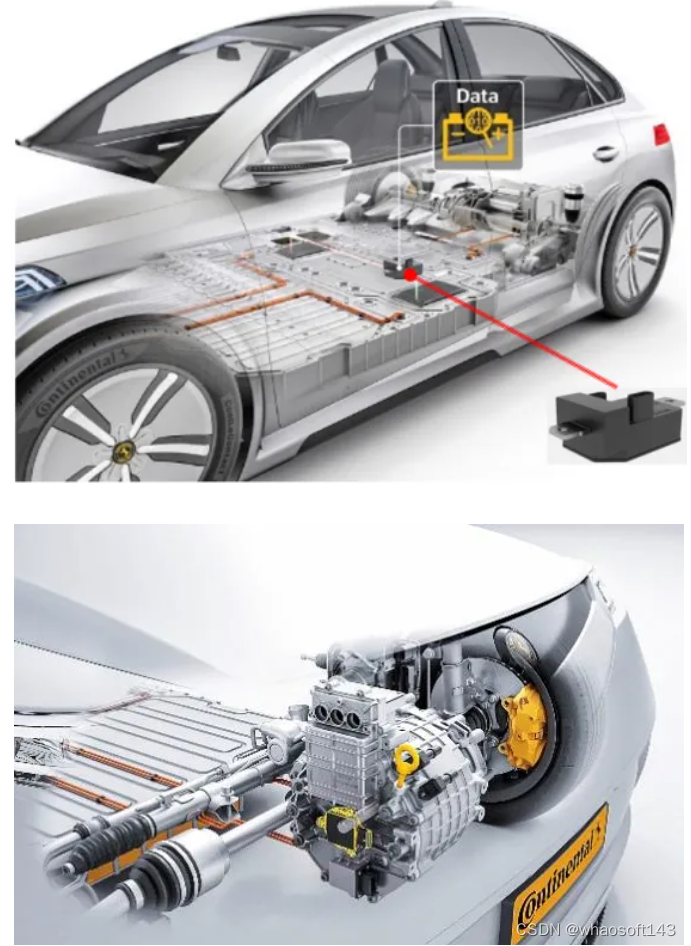
Conti 高压电流传感器模块
Conti 电机转子位置传感器
- 保隆科技通过极强的研发能力,历经7次创业,基于其汽车轮胎胎压监测系统(TPMS)的研发成功与市场拓展,逐步打造出丰富的传感器产品矩阵,核心产品有TPMS、车用传感器(压力、加速度和电流类等)以及智驾相关传感器。
小 结:
- 汽车传感器头部企业仍以外资企业为主,如博世立足于博世芯片、全方位、一体化的产业布局,建立起了成熟的研发方案和完善的供应链体系,Continental(大陆)立足于其自身的全球化布局,服务本土客户,并积极和本土相关企业建立合作关系,打造适应国内的产品和供应链体系。
- 传感器技术国内企业仍处于技术追赶阶段,在部分领域得到突破,如保隆在胎压监测传感器领域的建树,打破了国外企业的垄断,并且实现了在欧洲建立研发中心的重大里程碑目标,同时,诸如天博、安培龙等国内温度传感器以及华为、森思泰克等智能驾驶相关企业也取得了傲人的成绩。
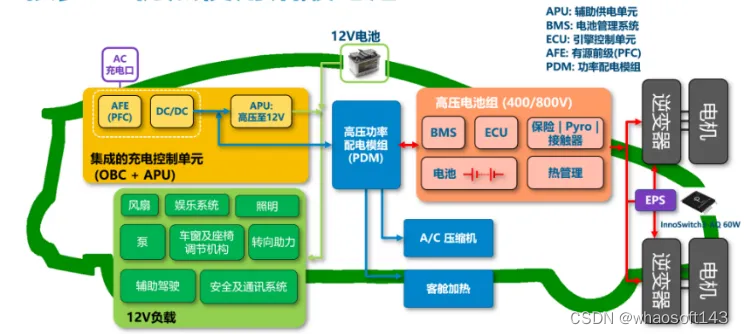
06 系统级传感器的作用介绍
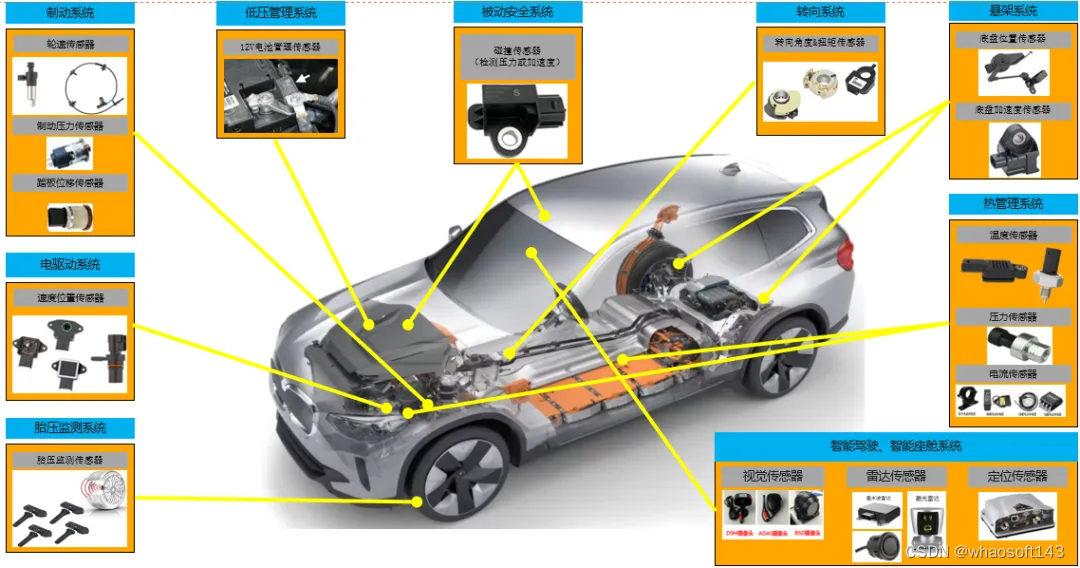
汽车主要传感器构成
系统 | 传感器 | 作用 |
制动系统 | 轮速传感器 | 用于测量车轮的转速。这些信息对于防抱死刹车系统(ABS)至关重要,因为它们帮助系统识别车轮是否即将抱死,从而调整制动力以保持车轮旋转。 |
制动系统 | 制动压力传感器 | 监测制动系统中的液压压力。这些传感器确保刹车踏板的力量转化为适当的制动力,同时也可以检测制动系统是否存在泄漏或其他问题。 |
制动系统 | 加速度传感器 | 检测车辆在各个方向上的加速度。这些传感器有助于判断车辆的运动状态,如加速、减速或转弯,从而优化制动控制。 |
制动系统 | 位移传感器 | 安装在刹车踏板上,测量踏板的移动距离。这些传感器有助于确定驾驶员的制动意图,从而调整制动力度。 |
制动系统 | 转向角传感器 | 测量方向盘的转向角度。这些数据有助于车辆动态控制系统了解车辆的行驶方向,从而在转弯时优化制动力分配。 |
制动系统 | 温度传感器 | 监测制动系统的温度,如刹车片、刹车盘和液压油的温度。这些传感器有助于防止制动系统过热,保证制动效能。 |
制动系统 | 油壶液位传感器 | 主要用于监测液压制动系统中的液体水平,确保液压油或制动液的充足。 |
这些传感器通过提供实时的车辆状态信息,帮助电动车的制动系统更安全、更有效地工作。 | ||
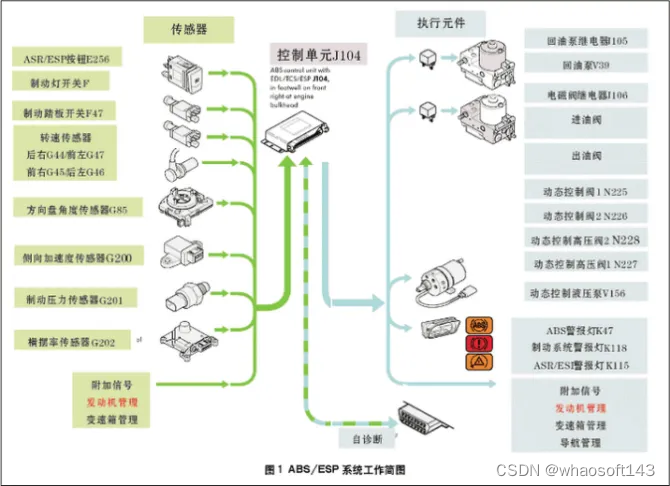
Ø控制单元:制动系统由制动主缸、制动分缸、制动盘、制动鼓、刹车踏板、制动油管和制动液等组成。控制单元包括电子控制单元(ECU)和机械连接。 Ø输入:驾驶员通过踩下刹车踏板,将制动信号输入到制动系统。ECU通过踏板传感器获取制动压力信号。 Ø信号处理:ECU根据制动压力信号计算所需的制动力,并控制制动分缸的液压输出,以实现精确的制动效果。 Ø执行:制动分缸通过液压油将制动力传递到制动盘或制动鼓,产生摩擦力,减缓或停止车轮的旋转。 Ø反馈:ECU通过轮速传感器获取车轮速度信息,并根据需要调整制动力,以确保制动效果。 Ø辅助功能:现代制动系统通常配备ABS、EBD、TCS等电子辅助功能,以提高制动效率和安全性。 | ||
转向系统 | 转向角传感器 | 测量方向盘的转向角度。这些数据对于车辆的动态控制系统(如电子稳定控制系统,ESC)非常重要,帮助系统了解车辆的行驶方向,从而在转弯时优化车辆稳定性。 |
转向系统 | 转向力矩传感器 | 测量驾驶员施加在方向盘上的力。这些传感器有助于判断驾驶员的转向意图,并可以用来调整助力转向系统,以提供更舒适或更直接的转向反馈。 |
转向系统 | 转向速度传感器 | 监测方向盘的转动速度。这些数据对于车辆的转向辅助系统(如车道保持辅助系统)至关重要,帮助系统快速响应驾驶员的转向操作。 |
这些传感器通过提供实时的车辆状态信息,帮助电动车的转向系统更安全、更有效地工作。 | ||
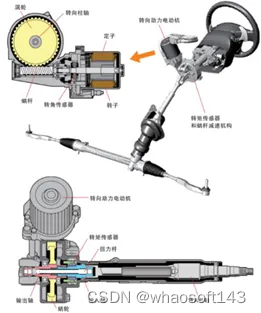

转向系统工作原理如下: Ø控制单元:转向系统由方向盘、转向柱、转向机、转向拉杆、转向节、轮胎等组成。控制单元包括电子控制单元(ECU)和机械连接。 Ø输入:驾驶员通过转动方向盘,将转向信号输入到转向系统。ECU通过方向盘角度传感器获取转向角度信号。 Ø信号处理:ECU根据转向角度信号计算所需的转向角度,并控制转向机的转向角度输出,以实现精确的转向效果。 Ø执行:转向机通过转向拉杆和转向节,将转向角度传递到前轮,实现车辆的转向。 Ø反馈:ECU通过轮速传感器和转向角度传感器获取车轮速度和转向角度信息,并根据需要调整转向角度,以确保转向效果。 Ø辅助功能:现代转向系统通常配备EPS(电动助力转向系统)等电子辅助功能,以提高转向效率和舒适性。 | ||
悬架系统 | 车身高度传感器 | 用于监测车身相对于地面的高度。这些传感器对于调整空气悬架系统尤为重要,确保车辆在不同负载和路况下保持适当的高度。 |
悬架系统 | 加速度传感器 | 测量车辆在垂直方向上的加速度,即车辆的颠簸情况。这些数据用于实时调整悬架的硬度,以减少颠簸和提升乘坐舒适性。 |
这些传感器通过提供实时的车辆状态信息,帮助悬架系统更安全、更有效地工作,从而提升整体驾驶体验。 | ||
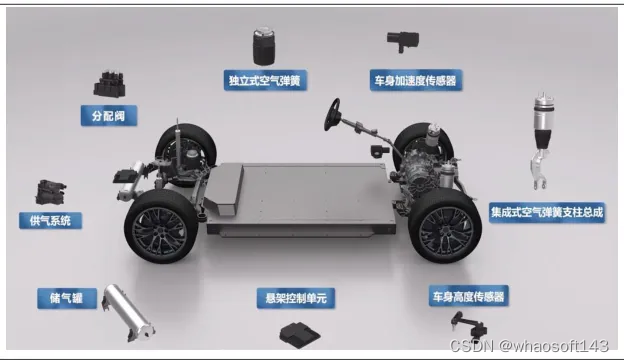
空气弹簧悬架系统工作原理如下: Ø控制单元:空气弹簧悬架系统由空气弹簧、气压控制单元(ECU)、压缩机、储气罐、阀门和传感器等组成。控制单元包括ECU和机械连接。 Ø输入:ECU通过车身加速度传感器、高度传感器等获取车辆状态信息,如车身高度和行驶路况。 Ø信号处理:ECU根据车辆状态信息计算所需的空气弹簧压力,以实现车身高度和悬架刚度的调整。 Ø执行:ECU通过控制压缩机、储气罐和阀门,调节空气弹簧内的气体压力,以调整车身高度和悬架刚度。 Ø反馈:ECU通过车身高度传感器和悬架压力传感器获取车身高度和悬架压力信息,并根据需要调整空气弹簧压力,以确保悬架性能。 Ø辅助功能:现代空气弹簧悬架系统通常配备高度调节、刚度调节、自适应调节等辅助功能,以提高悬架性能和驾驶舒适性。 | ||
电驱动系统 | 电流传感器 | 监测流经电动机的电流。这些数据对于控制电动机的输出功率和效率至关重要。 |
电驱动系统 | 电压传感器 | 测量电动机和电池的电压水平。这些信息用于确保电池和电动机在安全的工作电压下运行。 |
电驱动系统 | 温度传感器 | 监测电动机、逆变器和其他关键电驱动组件的温度。这些传感器有助于防止过热,确保系统稳定性和寿命。 |
电驱动系统 | 位置传感器 | 在某些电动机中,用于检测电动机转子的位置。这些数据对于精确控制电动机的运行至关重要。 |
电驱动系统 | 速度传感器 | 测量电动机的转速。这些数据用于控制电动机的扭矩输出,确保车辆按照驾驶员的意图加速和减速。 |
这些传感器通过提供实时的电驱动系统状态信息,帮助电动车更安全、更有效地运行。 | ||
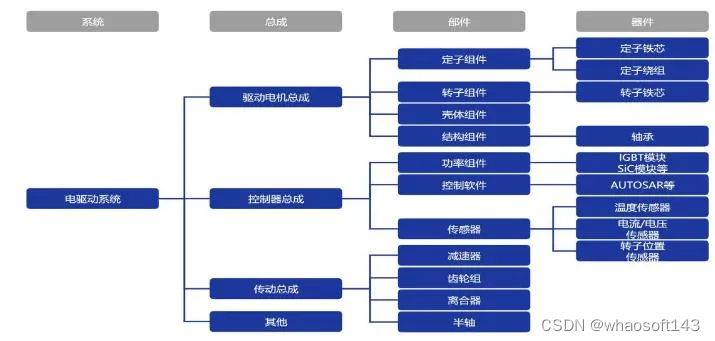
电驱动系统工作原理如下: Ø控制单元:电驱动系统主要由电机、电机控制器、电池组、DC-DC转换器、充电设备等组成。控制单元包括电机控制器和车载信息娱乐系统。 Ø输入:驾驶员通过加速踏板、制动踏板和方向盘等操作,将控制信号输入到电驱动系统。车载信息娱乐系统接收驾驶员的行驶指令和导航信息。 Ø信号处理:电机控制器根据驾驶员的输入信号,结合车载信息系统的导航信息,计算出电机所需的扭矩和转速,以实现车辆的加减速和转向。 Ø执行:电机控制器向电机发送控制信号,使电机产生所需的扭矩和转速,通过传动系统将动力传递到车轮,以驱动车辆行驶。 Ø反馈:电机控制器通过速度传感器、转矩传感器等获取电机的实际运行参数,并根据需要调整电机的控制信号,以确保电机的稳定运行。 Ø辅助功能:现代电驱动系统通常配备再生制动、能量管理、故障诊断等辅助功能,以提高电机的运行效率和系统的可靠性。 | ||
热管理系统 | 电机温度传感器 | 专门监测电机的温度。由于电机在运行时会产生热量,因此监测温度对于防止过热和保持效率非常重要。 |
热管理系统 | 逆变器温度传感器 | 逆变器是电驱动系统中的关键组件,它将电池的直流电转换为交流电以驱动电机。监测逆变器的温度对于防止故障和延长使用寿命非常重要。 |
热管理系统 | 转矩传感器 | 测量电机输出的转矩,这些数据对于控制车辆的加速和爬坡能力至关重要。 |
热管理系统 | 逆变器温度传感器 | 逆变器是电驱动系统中的关键组件,它将电池的直流电转换为交流电以驱动电机。监测逆变器的温度对于防止故障和延长使用寿命非常重要。 |
热管理系统 | 车载充电器温度传感器 | 对于配备车载充电器的电动车,监测充电器的温度对于确保充电安全和效率至关重要。 |
热管理系统 | 冷却液温度传感器 | 监测发动机或电池冷却液的温度。这些数据用于控制冷却系统的运行,确保温度保持在最佳工作范围内。 |
热管理系统 | 电池温度传感器 | 测量电池组的温度。这些传感器对于电池的健康和性能至关重要,因为电池在过热或过冷的情况下性能会下降。 |
热管理系统 | 空调系统温度传感器 | 测量车内空气的温度,确保空调系统提供适宜的温度。 |
热管理系统 | 散热器温度传感器 | 监测散热器的温度,以确保散热效率。 |
热管理系统 | 空调压力传感器 | 监测空调系统的制冷剂压力。这些数据对于确保空调系统正常运行和预防压缩机损坏至关重要。 |
电动汽车热管理系统工作原理如下: Ø控制单元:电动汽车热管理系统主要由电池热管理系统、电机热管理系统、空调系统和充电系统组成。控制单元包括电池管理系统(BMS)、电机控制器、空调控制器和充电控制器。 Ø输入:BMS、电机控制器、空调控制器和充电控制器通过温度传感器、电流传感器等获取电池、电机、车内温度和充电状态等信息。 Ø信号处理:BMS、电机控制器、空调控制器和充电控制器根据采集的信息,计算出所需的冷却或加热功率,以实现电池、电机和车内温度的调节。 Ø执行:电池热管理系统通过冷却液循环系统或空气循环系统,调节电池的温度;电机热管理系统通过冷却液循环系统,调节电机的温度;空调系统通过制冷剂循环系统,调节车内温度;充电系统通过调节充电功率,控制电池的充电温度。 Ø反馈:BMS、电机控制器、空调控制器和充电控制器通过温度传感器等获取电池、电机、车内温度和充电状态的实际值,并根据需要调整冷却或加热功率,以确保电池、电机和车内温度在最佳工作范围内。 Ø辅助功能:现代电动汽车热管理系统通常配备故障诊断、远程监控、自适应调节等辅助功能,以提高热管理系统的可靠性和智能化水平。 | ||
胎压监测系统 | 直接式胎压传感器 | 这些传感器安装在轮胎内部,直接测量轮胎的气压和温度。它们通常具有无线传输功能,能够将数据发送到车辆仪表板上的接收器。 |
胎压监测系统 | 间接式胎压传感器 | 这些传感器不是直接测量轮胎气压,而是通过监测轮胎的转速差异来推断气压。当轮胎气压下降时,轮胎的直径会减小,导致转速增加。这些系统通常依赖于车辆的ABS系统来监测轮胎转速。 |
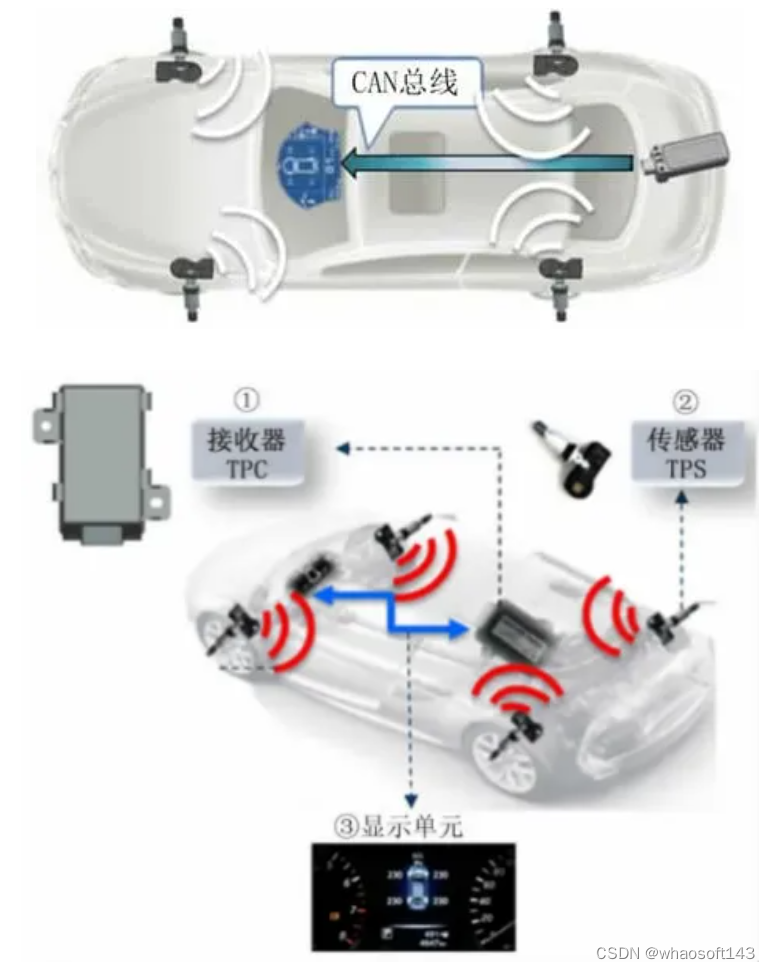
胎压监测系统工作原理如下: Ø控制单元:胎压监测系统主要由轮胎压力传感器、信号发射器、接收器和显示器组成。控制单元包括ECU和信号处理单元。 Ø输入:轮胎压力传感器实时监测轮胎的气压和温度,并将数据通过无线信号发送到信号发射器。 Ø信号处理:信号发射器将接收到的气压和温度数据通过无线信号发送到接收器。接收器将无线信号转换为数字信号,并通过ECU进行处理和分析。 Ø执行:ECU根据处理和分析的结果,判断轮胎的气压是否正常,并通过显示器向驾驶员显示轮胎的实时气压和温度信息。 Ø反馈:ECU通过显示器向驾驶员提供轮胎的实时气压和温度信息,以提醒驾驶员及时调整轮胎气压或进行维护。 Ø辅助功能:现代胎压监测系统通常配备故障报警、历史数据记录、轮胎位置显示等辅助功能,以提高系统的可靠性和用户友好性。 | ||
低压管理系统 | 电池状态传感器 | 监测车载电池的电量。启停系统需要电池来重新启动动力系统,因此必须确保电池有足够的电量来支持这一功能。 |
汽车低压管理系统工作原理从系统的角度说明如下: Ø控制单元:汽车低压管理系统主要由低压电源系统(例如12V/24V电池组)、发电机、稳压器、电压调节器、熔断器、低压用电设备(例如照明、喇叭、仪表盘、车窗升降器等)组成。控制单元通常包括电池管理系统(BMS)和发电机控制单元(GCU)。 Ø输入:BMS和GCU通过电压和电流传感器等获取电池组、发电机以及低压用电设备的电压和电流信息。 Ø信号处理:BMS和GCU根据采集的信息,计算出所需的发电功率和电压,以维持低压系统的稳定运行。 Ø执行:发电机根据GCU的控制信号,产生所需的电能,并通过稳压器和电压调节器,为低压系统提供稳定和适当的电压。同时,熔断器起到过载保护的作用。 Ø反馈:BMS和GCU通过电压和电流传感器等获取低压系统的实际电压和电流信息,并根据需要调整发电机的输出功率,以确保低压系统的稳定运行。 Ø辅助功能:现代低压管理系统通常配备电池电量管理、故障诊断、充电模式控制等辅助功能,以提高系统的可靠性和智能化水平。 | ||
智能驾驶系统 | 摄像头 | 用于捕捉车辆前方的视觉信息,包括交通信号、行人、其他车辆等。 |
智能驾驶系统 | 雷达 | 通过发射无线电波并分析反射回来的信号,检测车辆周围物体的速度和距离。 |
智能驾驶系统 | 激光雷达 | 发射激光并测量反射回来的光的时间差,提供车辆周围环境的三维图像。 |
智能驾驶系统 | 超声波传感器 | 用于停车辅助系统,检测车辆周围的障碍物。 |
智能驾驶系统 | 定位系统 | 提供车辆的精确位置信息,对于导航和自动驾驶功能至关重要。 |
汽车智能驾驶系统工作原理如下: Ø控制单元:汽车智能驾驶系统主要由感知系统、决策系统、执行系统和人机交互界面组成。控制单元包括感知模块、决策模块、执行模块和界面模块。 Ø输入:感知模块通过传感器(如摄像头、雷达、激光雷达、超声波传感器等)实时采集车辆周边环境信息,并将数据传输至决策模块。 Ø信号处理:决策模块对采集的环境信息进行处理和分析,判断当前行驶环境,并规划行驶路径。同时,决策模块会根据驾驶员的操作指令,调整行驶策略。 Ø执行:执行模块根据决策模块的指令,通过控制转向、加速、制动等系统,实现车辆的智能行驶。例如,自动转向系统控制方向盘,自动加速系统控制油门,自动制动系统控制刹车。 Ø反馈:执行模块将车辆的实际运行状态反馈给决策模块,以便决策模块根据实际情况调整行驶策略。同时,界面模块通过显示屏、声音提示等方式,向驾驶员展示系统的运行状态和预警信息。 Ø辅助功能:现代智能驾驶系统通常配备自适应巡航、车道保持、自动泊车、紧急制动等辅助功能,以提高驾驶安全性和舒适性。 | ||
智能座舱系统 | 车内摄像头 | 用于监控驾驶员和乘客,实现面部识别、情绪分析和疲劳监测。 |
智能座舱系统 | 生物识别传感器 (摄像头、雷达) | 包括指纹识别、面部识别和心率监测传感器,用于身份验证和安全控制。 |
智能座舱系统 | 环境传感器 | 监测车内的温度、湿度、光照和空气质量,以调节气候控制和氛围灯系统。 |
智能座舱系统 | 触摸屏和触控传感器 | 用于控制智能座舱的各种功能,如音响、导航和座椅调节。 |
智能座舱系统 | 语音识别传感器 | 识别和理解乘客的语音指令,控制车辆的智能系统。 |
智能座舱系统 | 头部和身体姿势传感器(摄像头、雷达) | 监测驾驶员和乘客的头部和身体姿势,用于安全带提醒和座椅调节。 |
智能座舱系统 | 乘客存在传感器 (摄像头、雷达) | 检测车内是否有乘客,以及乘客的位置和数量,以便于调整座椅和安全带提醒。 |
智能座舱系统 | 手势识别传感器 (摄像头) | 允许乘客通过手势来控制车辆的某些功能,如调节音乐音量或导航系统。 |

汽车智能座舱系统工作原理如下: Ø控制单元:汽车智能座舱系统主要由信息娱乐系统、导航系统、车载通信系统、智能座椅、氛围灯、语音交互系统、车载摄像头、智能显示器等组成。控制单元包括车载信息娱乐系统主机和车载操作系统。 Ø输入:驾驶员和乘客通过触摸屏、语音、手势等方式与智能座舱系统进行交互,输入各种指令和请求。 Ø信号处理:车载信息娱乐系统主机接收输入信号,并调用相应的软件应用和服务,如导航、音乐播放、电话等,以响应用户需求。 Ø执行:车载操作系统根据信息娱乐系统主机的指令,通过车载显示屏、扬声器、氛围灯等设备,展示信息和服务,为用户提供视听享受。 Ø反馈:车载摄像头、传感器等设备实时监测车内环境和乘客状态,并将数据反馈给车载信息娱乐系统主机,以实现自适应功能,如自动调节座椅、氛围灯、温度等。 Ø辅助功能:现代智能座舱系统通常配备智能语音助手、人脸识别、情绪识别、健康监测等辅助功能,以提高用户交互体验和个性化服务。 |
小 结:
底盘和电驱动系统、热管理系统和悬架系统、智能驾驶、智能座舱传感器是汽车传感器系统的重要组成部分,它们在确保车辆性能、安全性和舒适性方面发挥着关键作用。
下面是对这些传感器类型的总结:
1、底盘系统传感器:
- 功能:底盘传感器主要用于监测和控制车辆的动态行为,如速度、转向、制动和稳定性。
- 关键传感器:包括速度传感器、转向角度传感器、制动压力传感器、横向加速度传感器等。
- 应用:用于防抱死制动系统(ABS)、电子稳定控制系统(ESC)、牵引力控制系统(TCS)等。
2、热管理系统传感器:
- 功能:热管理传感器用于监测和控制车辆的温度相关参数,确保发动机和其他关键部件在适宜的温度范围内运行。
- 关键传感器:包括发动机冷却液温度传感器、进气温度传感器、油温传感器、空调温度传感器等。
- 应用:用于发动机冷却系统、车内温度控制、电池热管理等。
3、悬架系统传感器:
- 功能:悬架系统传感器用于监测车辆的高度、悬挂行程和路面状况,以优化车辆的性能和乘坐舒适性。
- 关键传感器:包括车身高度传感器、悬挂行程传感器、路面状况传感器(如颠簸传感器)等。
- 应用:用于自适应悬挂系统、空气悬挂系统、车辆稳定性控制等。
4、电驱动系统传感器:
- 功能:电驱动系统传感器用于监测和控制电动车的电动机、电池和其他关键电驱动组件的性能。
- 关键传感器:包括电流传感器、电压传感器、温度传感器、电机转速传感器、电池状态传感器等。
- 应用:用于电池管理系统(BMS)、电动机控制、能量回收系统、车辆动力输出控制等。
5、智能驾驶传感器:
- 功能:智能驾驶传感器用于感知车辆周围的环境,辅助或实现自动驾驶功能。
- 关键传感器:包括摄像头、雷达(RADAR)、激光雷达(LIDAR)、超声波传感器、惯性测量单元(IMU)等。
- 应用:用于车道保持辅助、自适应巡航控制、自动泊车、自动驾驶导航等。
6、智能座舱传感器:
- 功能:智能座舱传感器用于监测和提升车内乘客的舒适性和便利性。
- 关键传感器:包括车内摄像头、生物识别传感器、环境传感器、触摸屏和触控传感器、语音识别传感器等。
- 应用:用于个性化设置、情绪识别、疲劳监测、手势控制、座椅和气候控制系统等。
这些传感器类型在汽车中的应用不断发展和扩展,随着汽车技术的进步,它们在提高车辆性能、安全性和舒适性方面发挥着越来越重要的作用。随着传感器技术的不断进步和成本的降低,我们有理由相信这些传感器将在汽车中得到更广泛的应用,为汽车行业的发展做出更大的贡献。
07 未来发展趋势
汽车传感器的发展趋势受到汽车行业整体技术进步的推动,同时也响应了消费者对于更安全、高效、舒适驾驶体验的需求。以下是一些关键趋势:
1、集成化和智能化:随着汽车电子架构的演变,传感器将更加集成化,通过车载计算平台实现更高级的数据处理和分析。同时,传感器将变得更加智能化,能够自主学习和适应不同的驾驶环境和用户需求。
2、多传感器融合:为了实现更高级的自动驾驶功能,未来的汽车将越来越多地采用多传感器融合技术,包括摄像头、雷达、激光雷达和超声波传感器的组合,以提高感知能力和准确性。
3、长寿命和高可靠性:随着电动车和自动驾驶技术的发展,传感器需要能够在极端条件下长期稳定工作,因此对于传感器的耐用性和可靠性的要求将越来越高。
4、小型化和轻量化:为了适应汽车轻量化趋势,传感器将向小型化和轻量化发展,同时保持或提升性能。
5、低功耗和高能效:随着电动车对能源效率的重视,传感器将更加注重低功耗设计,以延长续航里程。
6、无线传感技术:无线传感器技术的发展将减少车辆的布线复杂性,提高安装和维护的便利性。
7、新材料和新工艺:新型材料和制造工艺的应用将进一步提升传感器的性能和成本效益。
8、数据安全和隐私保护:随着车联网技术的发展,传感器数据的安全性和用户隐私保护将成为重要的研究方向。
9、人工智能和机器学习:人工智能和机器学习技术将被广泛应用于传感器数据的分析和处理,以实现更智能的驾驶决策和车辆管理。
10、法规和标准:随着新技术的应用,相关的法规和标准也将不断完善,以保障传感器系统的安全性和可靠性。
这些趋势预示着汽车传感器技术的未来发展方向,也将推动汽车行业的整体技术进步和产业升级。
# 轨迹预测系列 | HiVT之进化版QCNet
原文链接:
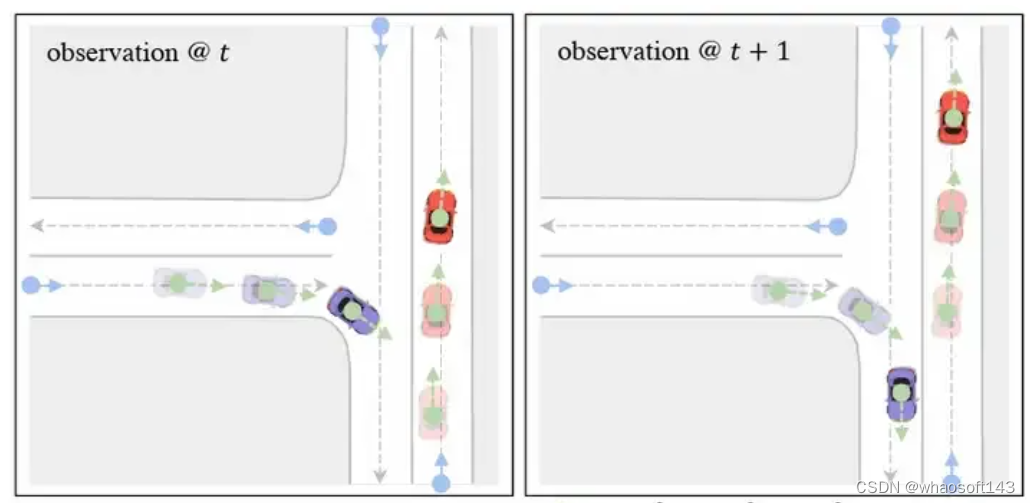
Abstract
Agent为中心的进行预测的model存在一个问题,当窗口移动时需要多次重复normalize到agent中心,再进行重复encoding的过程,对于onboard使用是不划算的。因此对于场景的encoding我们采用了query-centric的框架,可以重复使用已经计算过的结果,不依赖于全局的时空坐标系。同时,因为对于不同agent共享了场景特征,使得agent的轨迹decoding过程可以更加并行处理。
即使对于场景进行了复杂的encoding,目前的decoding办法对于多mode的信息抓取还是比较难,特别是对于长时间的预测。为了解决这个问题,我们首先使用anchor-free的query来生成轨迹proposal(走一步看一步的提取特征办法),这样model能能更好利用不同时刻位置的场景特征。然后是调整模块,利用上一步得到的proposal来进行轨迹的调优(动态的anchor-based)。通过这些高质量的anchor,我们的query-based decoder可以更好的处理多mode的特征。
打榜成功。这个设计也实现了场景特征encoding和并行多agent的decoding的pipeline。
Introduction
目前的轨迹预测paper有这么几个问题:
- 对于多种异构的场景信息额度处理效率低下。无人驾驶任务里,数据以一帧一帧的流给到model,包含矢量化的高精地图和周围agent的历史轨迹。最近的factorized attention方法(时空分开分别进行attentin)将这些信息的处理提升到新高度。但这需要对于每个场景元素做attention,如果场景非常复杂,cost还是很大的。
- 随着预测的时间增长,预测的不确定性也在爆炸式增长。比如在路口的车可能直行或转弯。为了避免错过潜在的可能性,模型需要获取多mode的分布,而不是仅仅只预测出现频率最高的mode。但是gt只有一个,没法对多个可能性进行比较好的学习。有些paper提出了多个手捏的anchor来监督的做法,这个效果就完全取决于anchor的质量高低了。当anchor无法准确cover gt时,这个做法就很糟糕了。也有别的做法直接预测多mode,忽视了mode塌缩和训练不稳定的问题。
为了解决上述问题,我们提出了QCNet。
首先,我们想要在利用好强大的factorized attention的同时,提高onboard的inference速度。过去的agent-centric encoding办法显然不行。当下一帧数据到来,窗口就会移动,但还是和上一帧有很大部分重叠的,所以我们有机会重复使用这些feature。但是agent-centric办法需要转到agent坐标系,导致其必须要重新encode场景。为了解决这个问题,我们使用了query-centric的办法:场景元素在它们自己的时空坐标系内进行特征提取,和全局坐标系无关(ego在哪无关了)。(高精地图可以用因为地图元素有长久的id,非高精地图应该就不好用了,地图元素的得在前后帧tracking住)
这使得我们可以把之前处理好的encoding结果进行重复使用,对于agent来说直接用这些cache的feature,这样就能节省latency了。
其次,为了更好地用这些场景encode结果进行多mode长时间预测,我们使用了anchor-free的query来一步步(在上一个位置的地方)提取场景的feature,这样每一次的decode都是非常短的一步。这个做法可以使得对于场景的特征提取重心放在agent未来在的某一个位置,而不是为了考虑未来多个时刻的位置,去提取远处的feature。这样得到的高质量anchor会在下一个refine的module进行精细调整。这样结合了anchor-free和anchor-based的做法充分利用了两个办法的优点,实现多mode长时间的预测。
这个做法是第一个探索了轨迹预测的连续性来实现高速inference的办法。同时decoder部分也兼顾了多mode和长时间预测的任务。
Approach
Input and Output
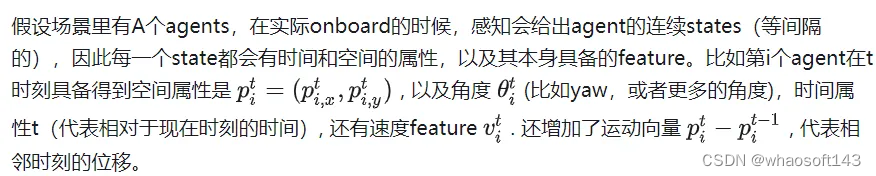
同时prediction模块还可以从高精地图获得M个polygon,每一个polygon都有多个点以及语义信息(crosswalk,lane等类型)。
预测模块使用T个时刻的上述的agent state和地图信息,要给出K个总共T'长度预测轨迹,同时还有其概率分布。
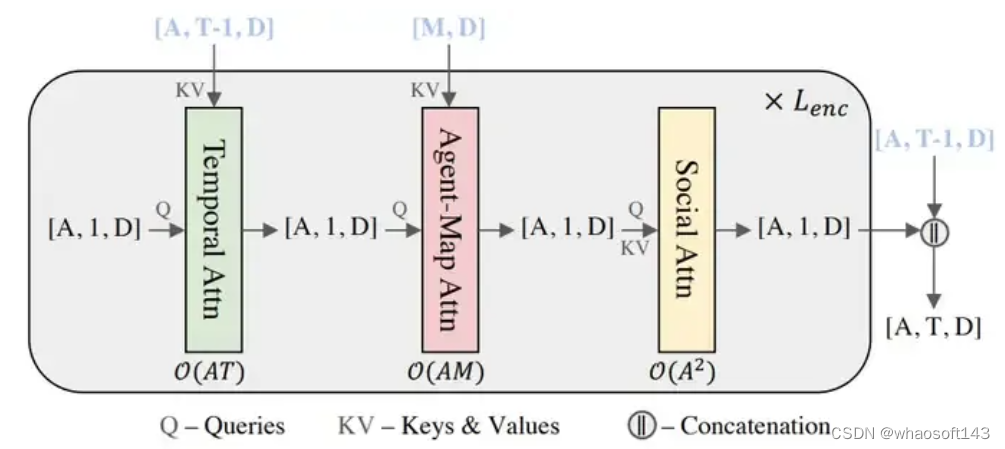
Query-Centric Scene Context Encoding
第一步自然是场景的encode。目前流行的factorized attention(时间和空间维度分别做attention)是这么做的,具体来说一共有三步:
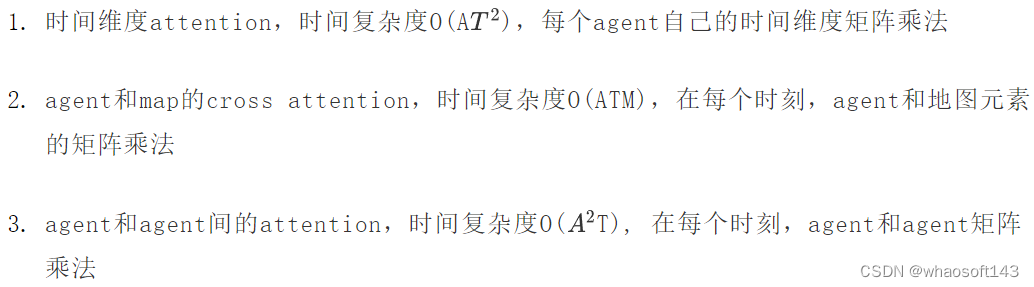
这个做法和之前的先在时间维度压缩feature到当前时刻,再agent和agent,agent和地图间交互的做法比起来,是对于过去每个时刻去做交互,因此可以获取更多信息,比如agent和map间在每个时刻的交互演变。
但是缺点是三次方的复杂度随着场景变复杂,元素变多,会变得很大。我们的目标就是既用好这个factorized attention,同时不让时间复杂度这么容易爆炸。
一个很容易想到的办法是利用上一帧的结果,因为在时间维度上其实有T-1帧是完全重复的。但因为我们需要把这些feature旋转平移到agent当前帧的的位置和朝向,因此没法就这么使用上一帧运算得到的结果。
为了解决坐标系的问题,采用了query-centric办法,来学习场景元素的特征,而不依赖它们的全局坐标。这个做法对每个场景元素建立了局部的时空坐标系,在这个坐标系内提取特征,即使ego到别处,这个局部提取出来的特征也是不变的。这个局部时空坐标系自然也有一个原点位置和方向,这位置信息作为key,提取出来的特征作为value,便于之后的attention操作。整个做法分为下面几步:
Local Spacetime Coordinate System
对于agent i在t时刻的feature来说,选择这个时刻的位置和朝向作为参考系。对于map元素来说,则采用这个元素的起始点作为参考系。这样的参考系选择方法可以在ego移动后提取的feature保持不变。
Scene Element Embedding
对于每个元素内的别的向量特征,都在上述参考系里获取极坐标表示表达。然后将它们转成傅里叶特征来获取高频信号。concat上语义特征后再MLP获取特征。对于map元素,为了保证内部点的顺序不相关性,先做attention后pooling的操作。最后获得agent特征为[A, T, D], map特征为[M, D]. D是特征维度,保持一致才可以方便attention的矩阵相乘。这样提取出来的特征可以使得ego处于任何地方都能使用。
傅里叶embedding: 制造正态分布的embedding,对应各种频率的权重,乘输入和2Π, 最后取cos和sin作为feature。直观理解的话应该是把输入当作一个信号,把信号解码成多个基本信号(多个频率的信号)。这样可以更好的抓取高频信号,高频信号对于结果的精细程度很重要,一般的做法容易丢精细的高频信号。值得注意的是对于noisy数据不建议使用,因为会误抓错误的高频信号。(感觉有点像overfit,不能太general但又不能精准过头)
Relative Spatial-Temporal Positional Embedding
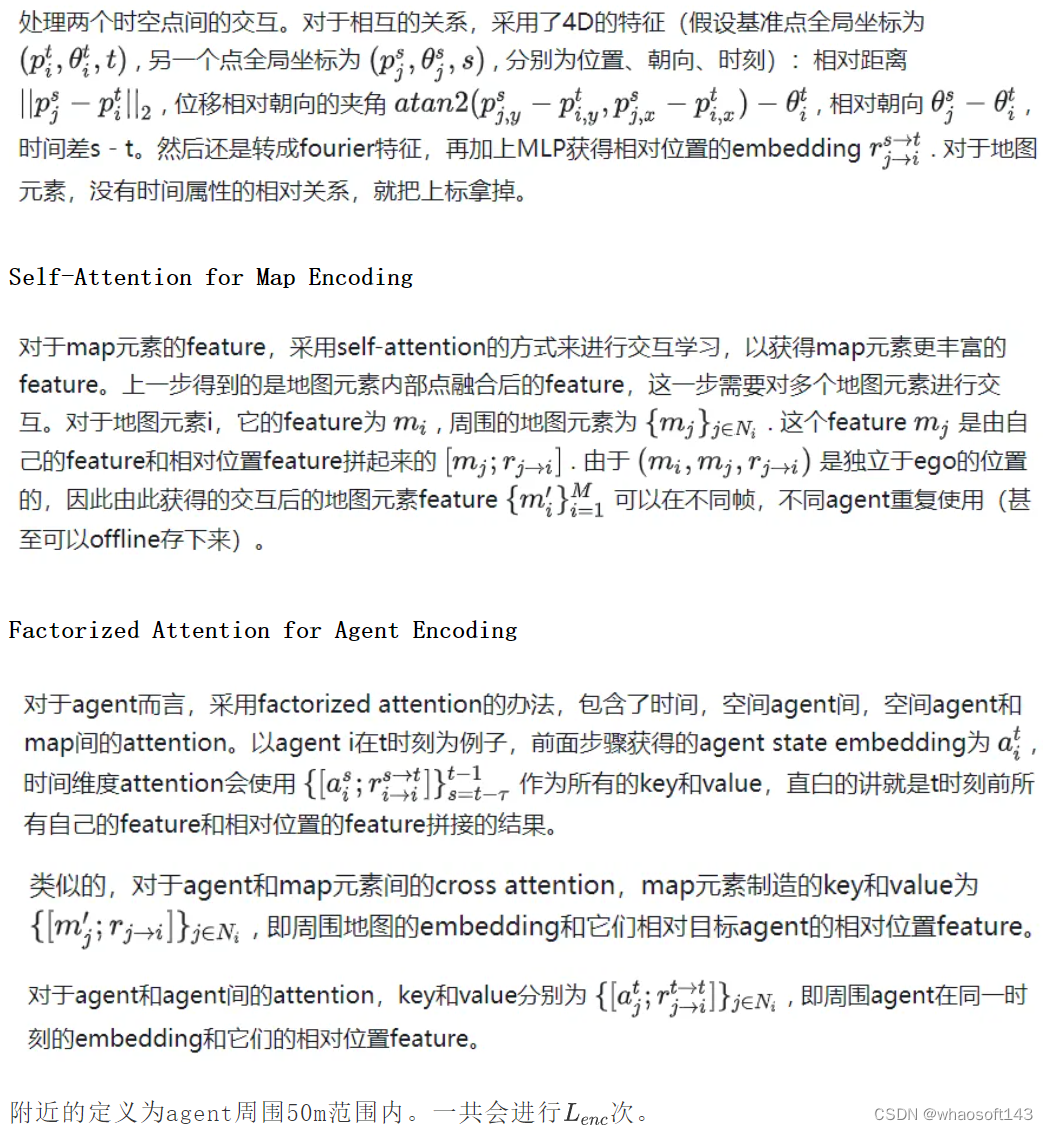
值得注意的是,通过以上方法得到的feature具备了时空不变性,即不管ego在什么时刻到什么地方,上述feature都是不变的,因为都没有针对当前的位置信息进行平移旋转。由于相比于上一帧只是多了新的一帧数据,并不需要计算之前的时刻的feature,所以总的计算复杂度除以了T。
Query-Based Trajectory Decoding
类似于DETR的anchor-free query去某些key value里做attention的办法会导致训练不稳定,模态塌缩的问题,同时长时间预测也不靠谱,因为不确定度会在靠后时间爆炸。因此此模型采用了先来一次粗的anchor-free query办法,再对这个输出进行refine的anchor-base办法。
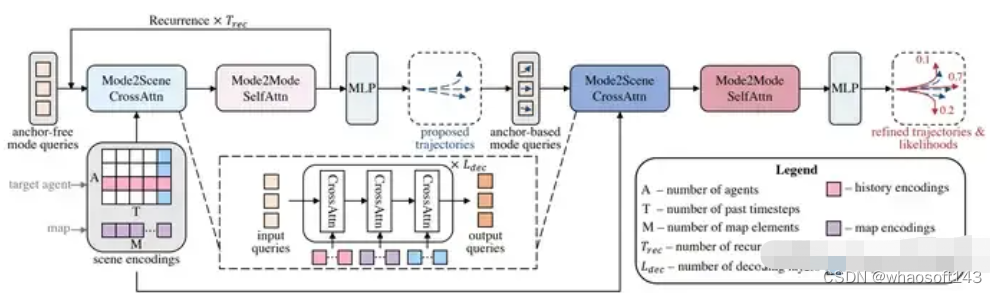
整个网络结构
Mode2Scene and Mode2Mode Attention
Mode2Scene的两步都采用了DETR结构:query为K个轨迹mode(粗的proposal步是直接随机生成的,refine步是由proposal步得到的feature作为输入),然后在场景feature(agent历史,map,周围agent)上做多次cross attention。
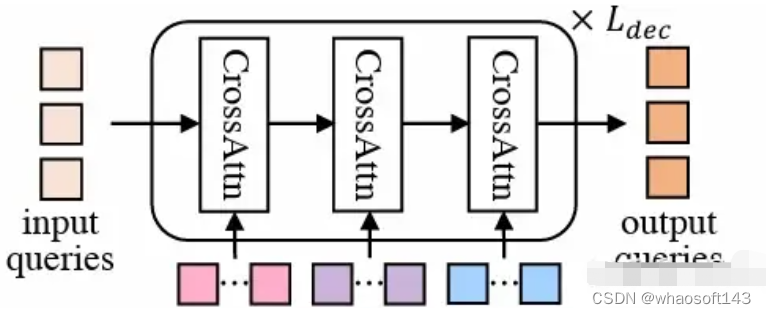
DETR结构
Mode2Mode则是在K个mode间进行self attention,企图实现mode间的diverse,不要都聚在一起。
Reference Frames of Mode Queries
为了并行预测多个agent的轨迹,场景的encoding是被多个agent分享的。因为场景feature都是相对于自身的feature,所以要使用的话还是得转到agent的视角下。对于mode的query,会附加上agent的位置和朝向信息。和之前encode相对位置类似的操作,也会对场景元素和agent的相对位置的信息进行embedding作为key和value。(直观上说就是agent每个mode在附近信息使用上的一个加权注意力)
Anchor-Free Trajectory Proposal
第一次是anchor free的办法,采用可以学习的query来制造相对低质量的轨迹proposal,一共会产生K个proposal。由于会用cross attention的方式从场景信息里提取特征,因此可以高效产生比较少而有效的anchor供第二次refine使用。self attention则使得各proposal总体会更diverse。

Anchor-Based Trajectory Refinement
anchor free的办法虽然比较简单,但也存在训练不稳定的问题,有可能mode塌缩。同时,随机生成的mode还需要能在全场景里对于不同agent都有不错的表现,这比较难,很容易生成出不符合运动学的或者不符合交通的轨迹proposal。因此我们想到可以再来一次anchor-based修正。在proposal的基础上预测了一个offset(加到原proposal获得修正后轨迹),并预测了每个新轨迹的概率。
这个模块同样使用了DETR的形式,每个mode的query都是用上一步的proposal来提取,具体是用了一个小的GRU来embed每个anchor(一步步往前走),使用到最后一个时刻的feature作为query。这些基于anchor的query可以提供一定的空间信息,使得attention时更容易捕捉有用的信息。
Training Objectives
和HiVT一样(参考HiVT的分析),采用Laplace分布。直白的讲就是把每个mode下每个时刻建模为一个laplace分布(参考一般的高斯分布,由mean和var,代表这个点的位置和其不确定性)。并且认为时刻之间是独立的(直接连乘)。Π代表了对应mode的概率。
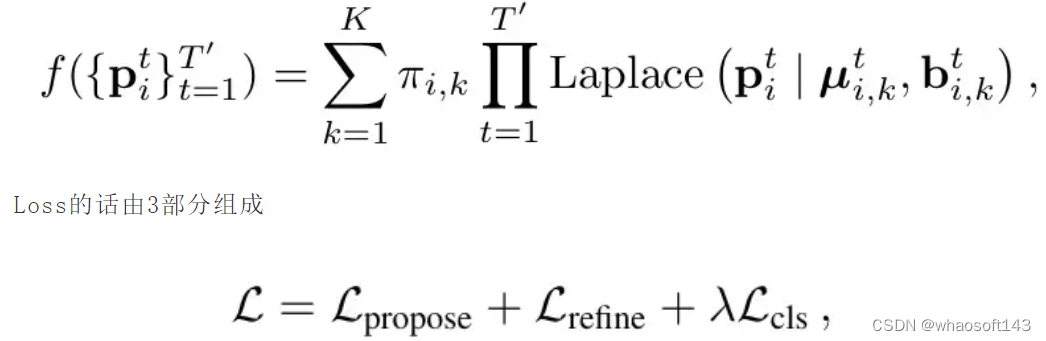
主要分为两部分:分类loss和回归loss。
分类loss是指预测概率的loss,这个地方要注意的是需要打断梯度回传,不可以让概率的引起的梯度传到对于坐标的预测(即在假设每个mode预测位置为合理的前提下)。label则是最接近gt的为1,别的都是0。
回归loss有两个,一个是一阶段的proposal的loss,一个是二阶段的refine的loss。采用赢者通吃的办法,即只计算最接近gt的mode的loss,两个阶段的回归loss都要算。为了训练的稳定性,此处在两个阶段中也打断了梯度回传,使得proposal学习就专门学习proposal,refine就只学refine。
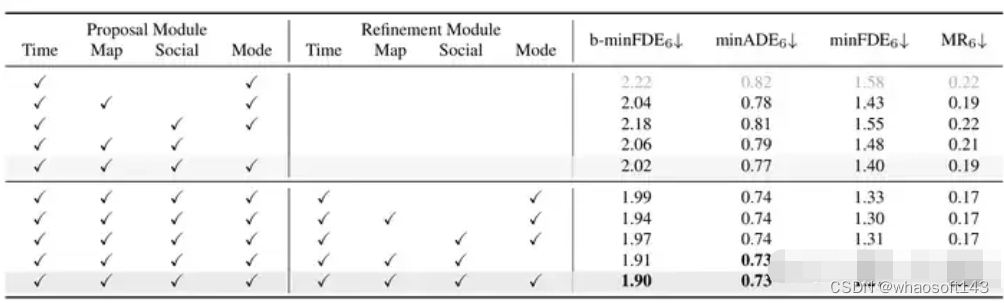
Experiments
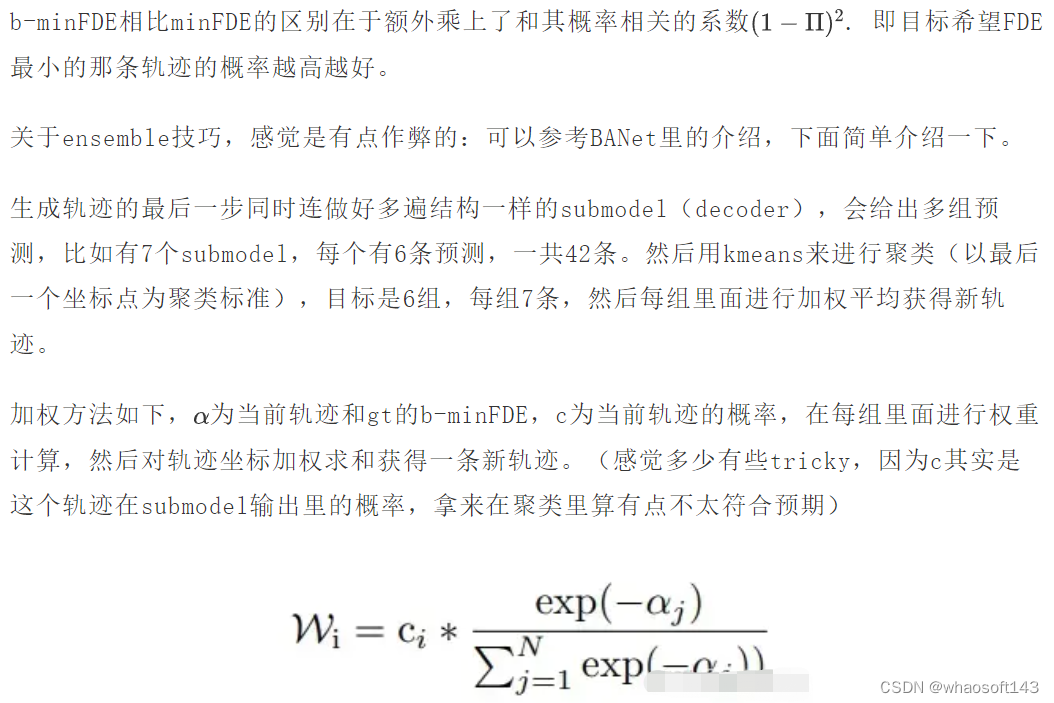
Argoverse2基本各项SOTA(* 表示使用了ensemble技巧)
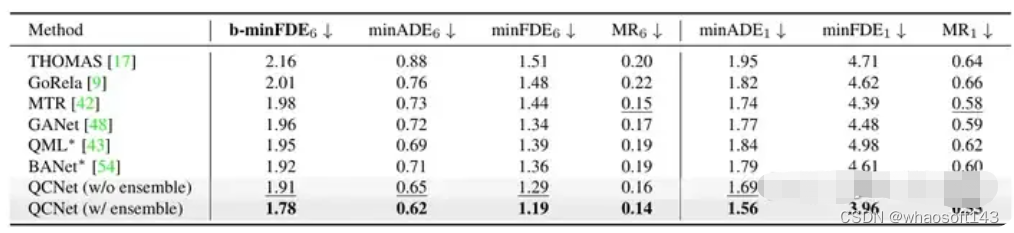
并且这么操作后新轨迹的概率也很难精准计算,不能用上述方法,否则总概率和就不一定是1了。似乎也只能等权重地算聚类里的概率了。
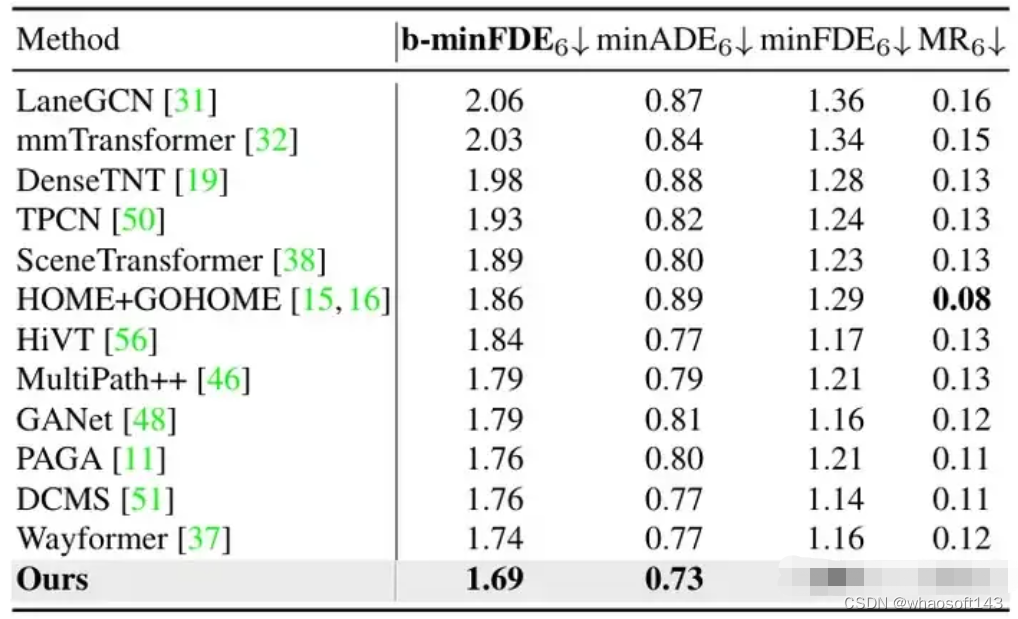
Argoverse1也是遥遥领先
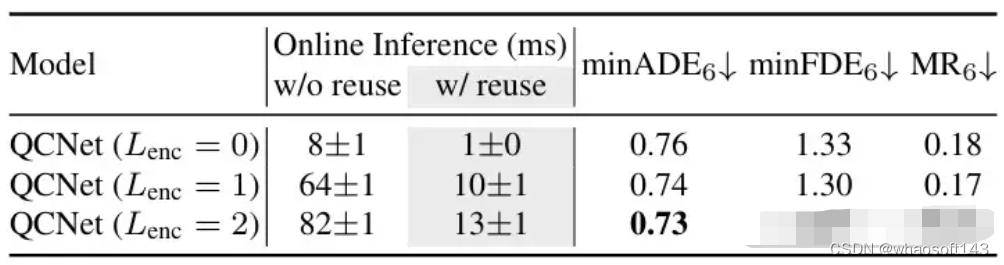
关于场景encode的研究:如果复用了之前的场景encode结果,infer的时间可以大幅减少。agent和场景信息的factorized attention交互次数变多,预测效果也会变好,只是latency也涨的很凶,需要权衡。
各种操作的研究:证明了refine的重要性,以及factorized attention在各种交互中的重要性,缺一不可。
# 华为激光雷达详细拆解和系统方案
华为作为中国自动驾驶技术第一梯队的卓越代表,其激光雷达产品也备受瞩目,不过关于华为激光雷达的公开资料非常少,即便是有也非常粗略。
本文通过详细拆解华为96线激光雷达产品,尝试分析华为激光雷达的技术方案,并通过对比市场其他主流激光雷达产品,结合激光雷达技术发展趋势,分析华为技术方案的特点,供大家参考。
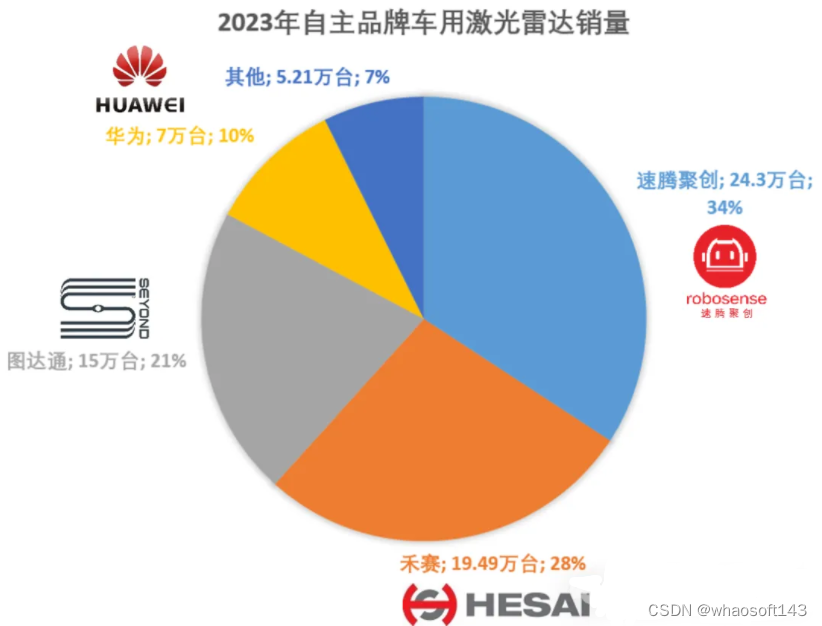
【一】华为激光雷达的市占率
2023年,中国车用激光雷达(自主品牌)总出货量约71万台,其中,速腾聚创是24.3万台(2022年是3.69万台)位列第一,禾赛是19.49万台(2022年是6.2万台),图达通大概超15万台,华为预计7万台,另外探维科技、览沃科技等其他大概合计5.21万台。
销量占比如下图所示:
中国是车载激光雷达的主要市场,2023年由于自动驾驶量产车型的增多,激光雷达出货量取得了大幅的增加。
2024年依然会保持增长势头,其中,速腾聚创财报显示,截止到2023年底,速腾聚创已经与22家车企及Tier 1取得定点合作,车型涉及63款。其中有12家车企的24款车型SOP,速腾将2024年的出货量目标定在了100万台。
禾赛科技预计在2024年底实现12家车企的40种车型达成SOP,2024年出货量预计大幅增长至60-70万台。
华为目前的主要客户是问界、阿维塔、极狐、智界、哪吒等,对应车型相关信息如下所示。随着问界等车型的热卖,2024年华为激光雷达的出货量会有大幅提升。

【二】华为激光雷达和其他产品的性能对比
下图汇总了目前主流的激光雷达产品主要性能指标,对比如下所示。
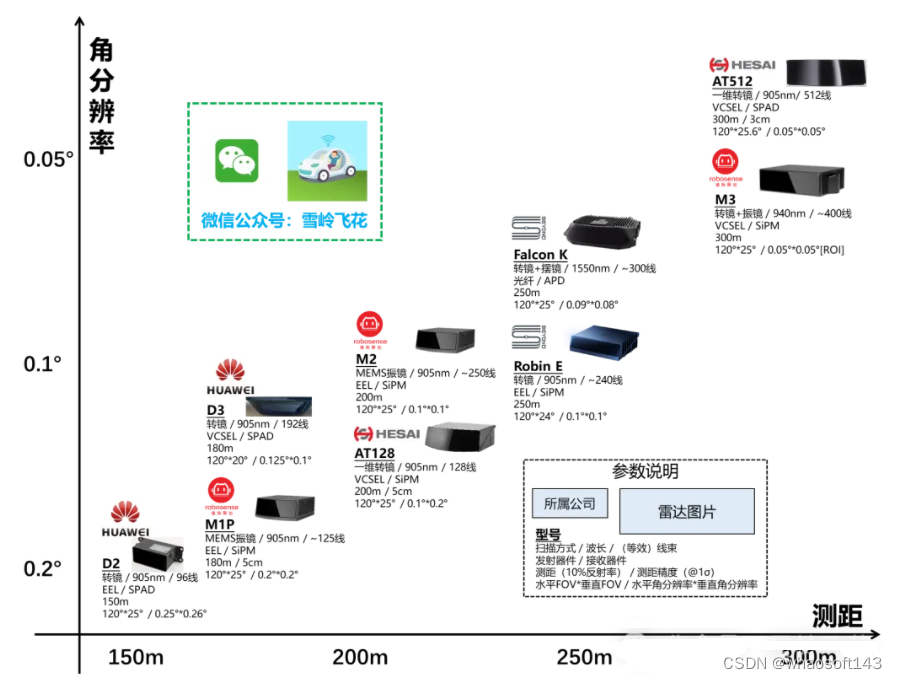
说明:上图数据来源于各公司官网和行业信息,将各产品依据标称的测距和角分辨率在坐标系中进行大致摆放,主要目的在于从特定的角度对部分性能进行对比,这些指标并无法代表激光雷达的全部性能,仅做参考。
从这张图可以看出很多信息,其中:
- 华为96线激光雷达(型号:D2)距离发布有3年半的时间,从测距和分辨率指标来看,在当前主流产品中已不占优势。
- 华为192线激光雷达(型号:D3)相对于速腾M1P和禾赛AT128,测距和角分辨率指标相当或者略高,和其他更高性能产品相比,尚有差距。
【三】华为96线激光雷达拆解
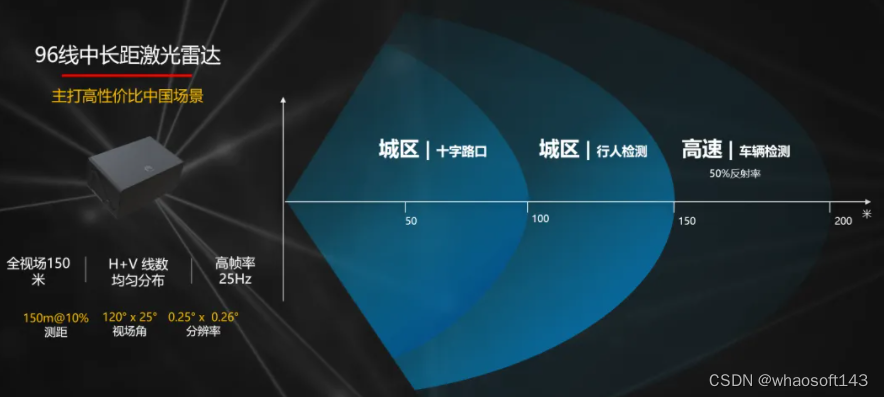
2020年12月,华为正式发布其首款车规级激光雷达产品——96线中长距激光雷达。
核心参数:
- 测距:150m@10%;
- 水平FOV:120°,垂直FOV:25°;
- 角分辨率:0.25°(H)×0.26°(V)
- 刷新频率:最高25Hz
阿维塔11上安装了3颗华为96线激光雷达,其中1颗前向,2颗在侧面。

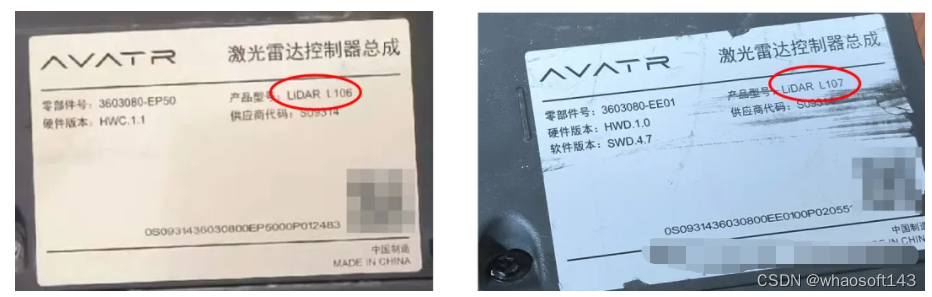
阿维塔的激光雷达有L106和L107两种型号,应该1个是前雷达,1个是侧雷达。这两种型号外形相同,不同点可能是不同安装位置做了微小适配,内部原理应该相同。
本文拆解的是一款型号是L107的激光雷达(右图)。
【1】整体结构
这款雷达采用较为规整的长方体外形,视窗口是一个矩形平面,和车身配合较为方便。整体外观如下:
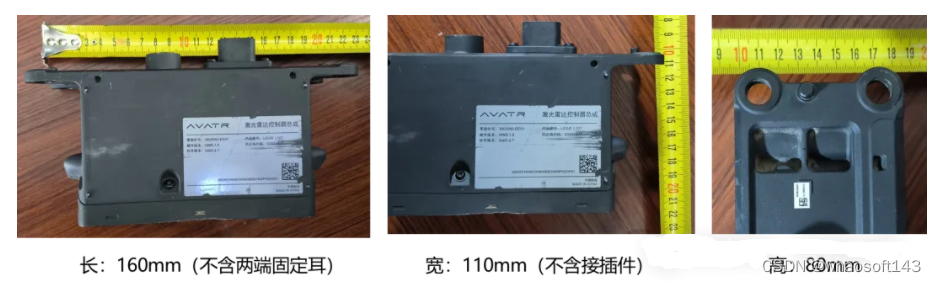
尺寸如下,相对于速腾M1P和禾赛AT128,这个雷达的尺寸是比较大的。
拿掉上壳之后的内部结构:
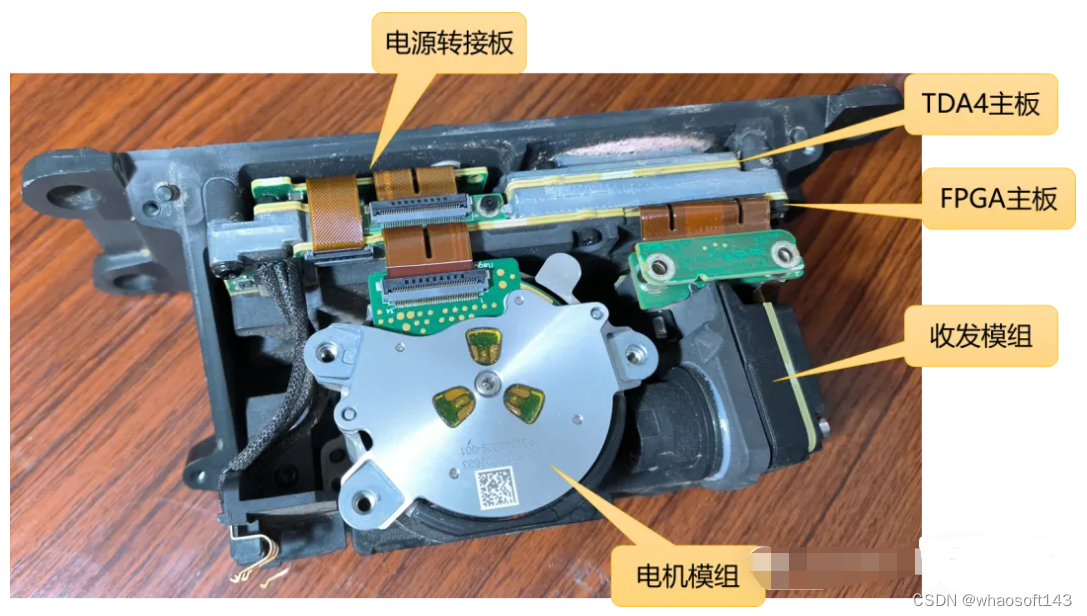
将底壳也去掉之后,核心电路板的连接关系:
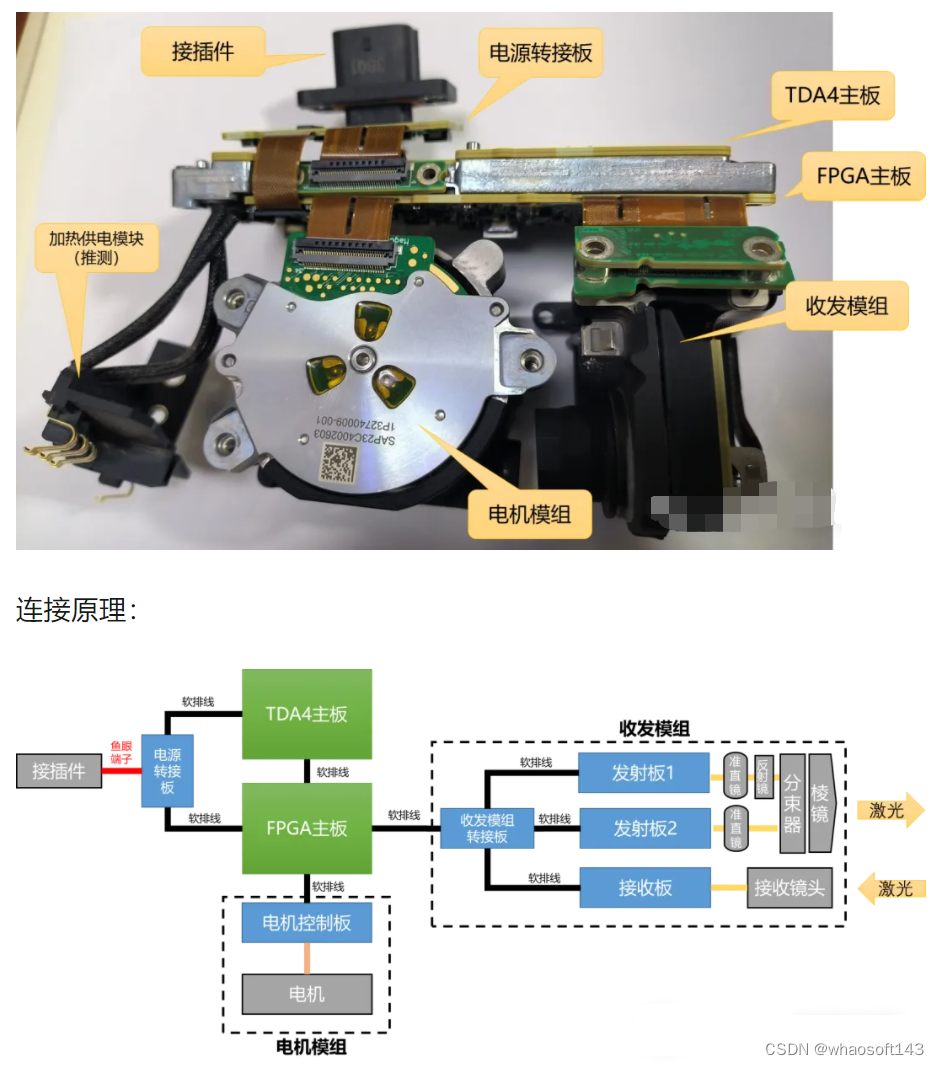
整体设计非常紧凑,大量使用软排线进行板间连接,电路板设计也非常规整。
【2】电机模组(扫描模块)
该激光雷达采用转镜进行水平方向上的扫描,有4面反射镜。
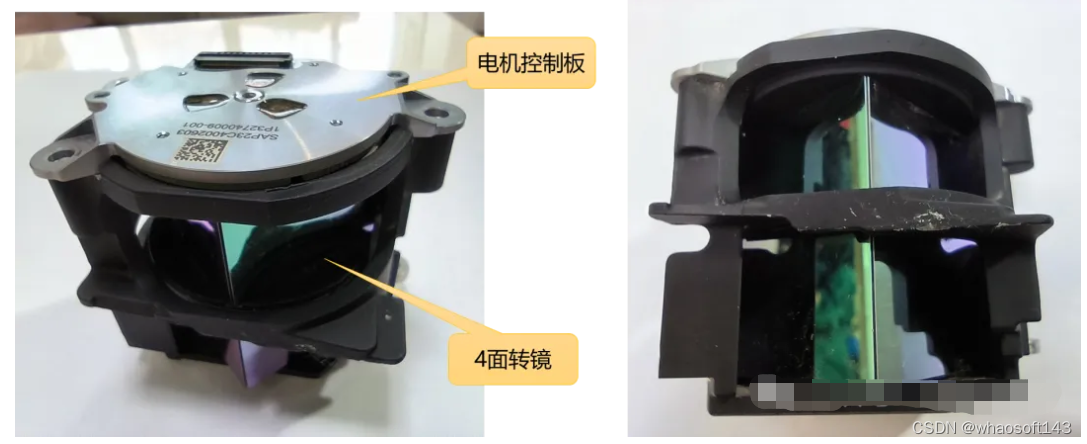
电机模组的4个视图:
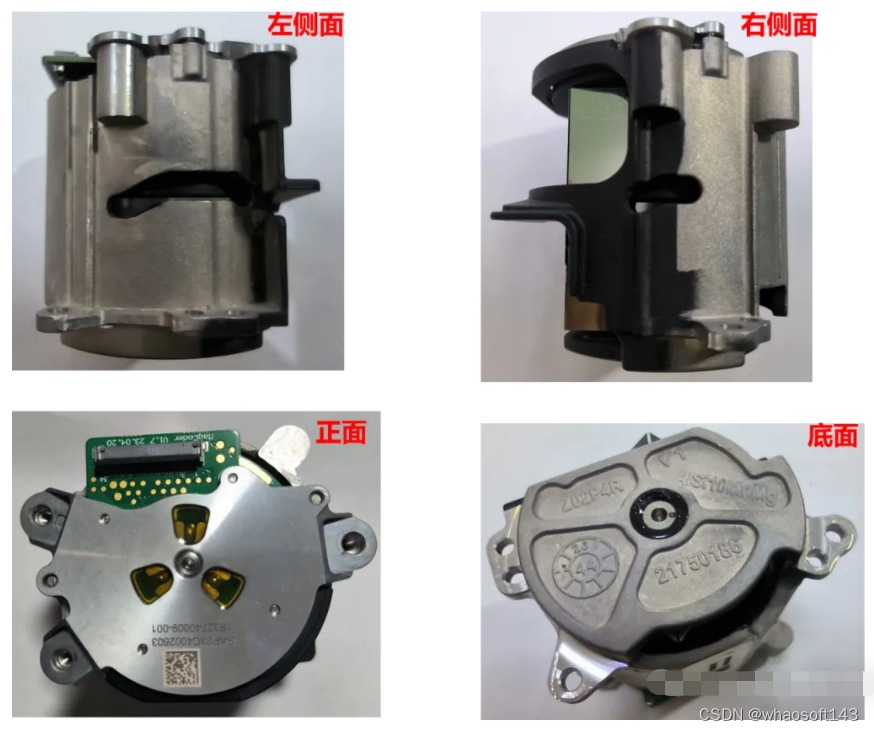
在靠近激光出入口的位置,合金架涂上了黑色吸波材料,用于吸收多余的激光束杂散和反射,减小干扰。
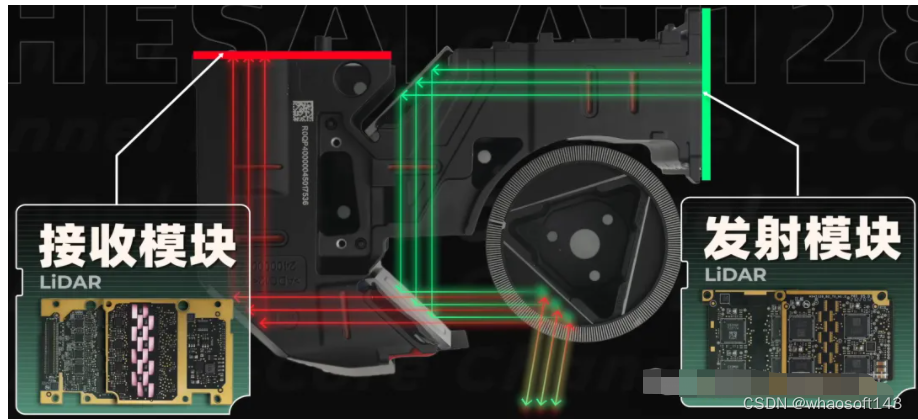
【3】收发模组
收发模组是该雷达最复杂的一个结构,原理如下:
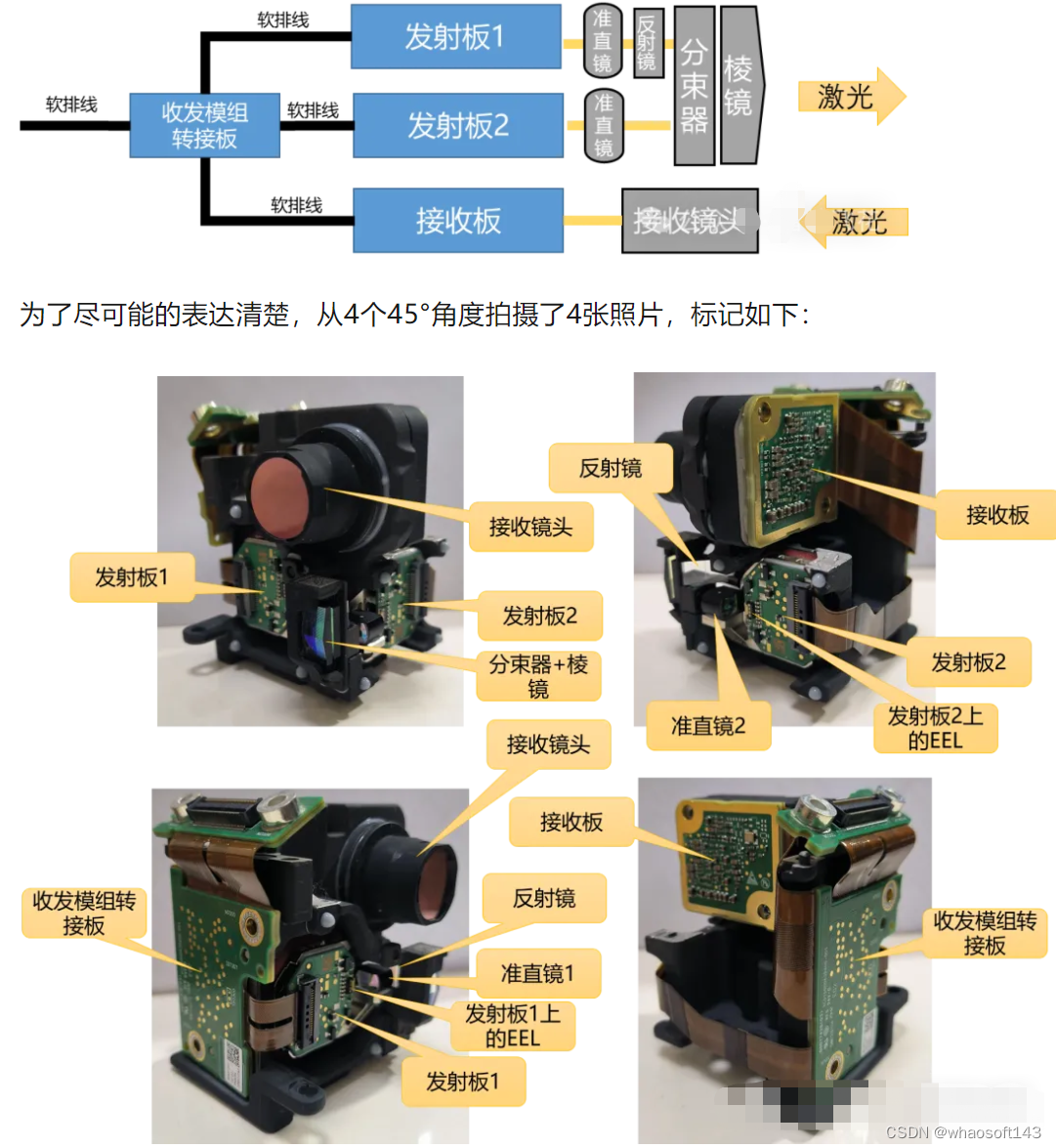
发射光路
发射光路方案:
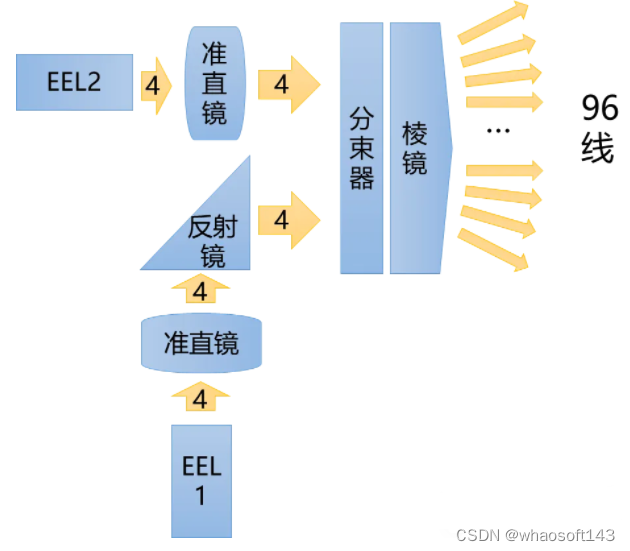
两个发射板电路完全相同,上面主要是驱动EEL激光发射器:
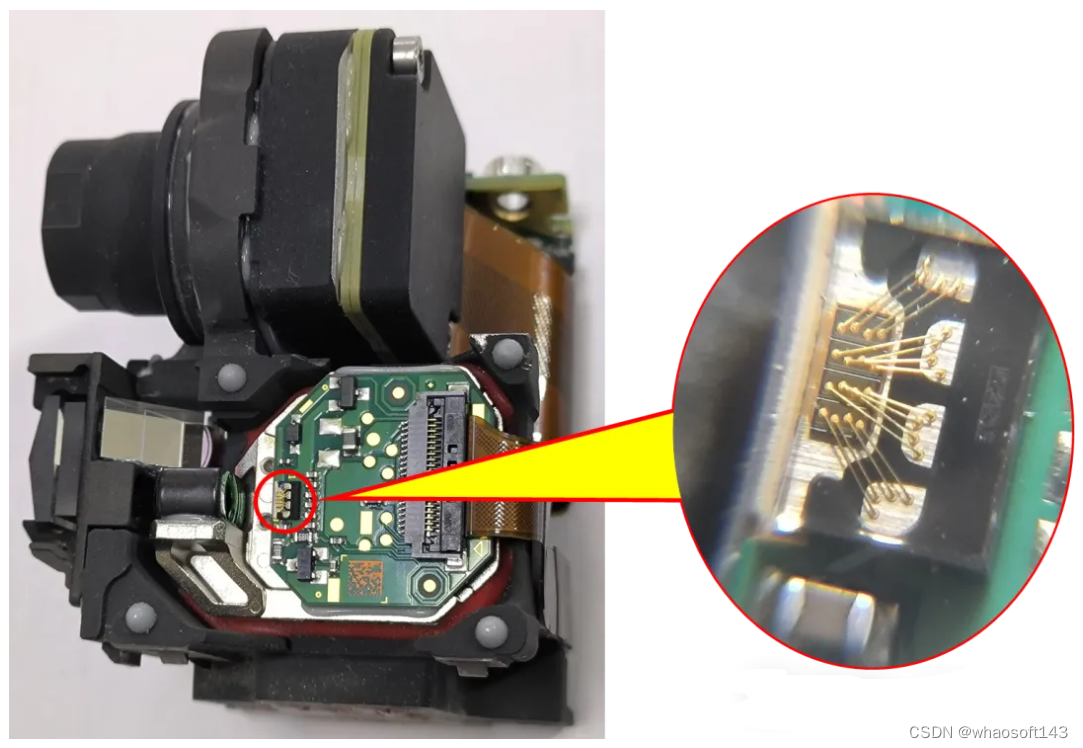
该雷达每块发射板上有4个EEL,两块发射板一共8个EEL。
EEL后面是准直镜:
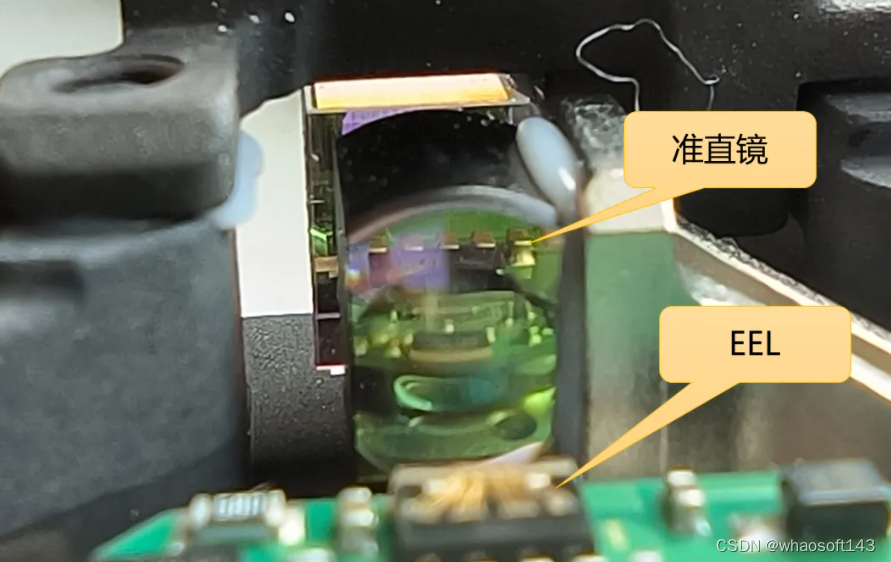
通过准直镜后,发射板1的激光由一个反射镜反射后到达分束器,发射板2的激光直接到达分束器。
一共8个EEL光束,由分束器分为96个激光束,然后由棱镜最终调整角度后射出。
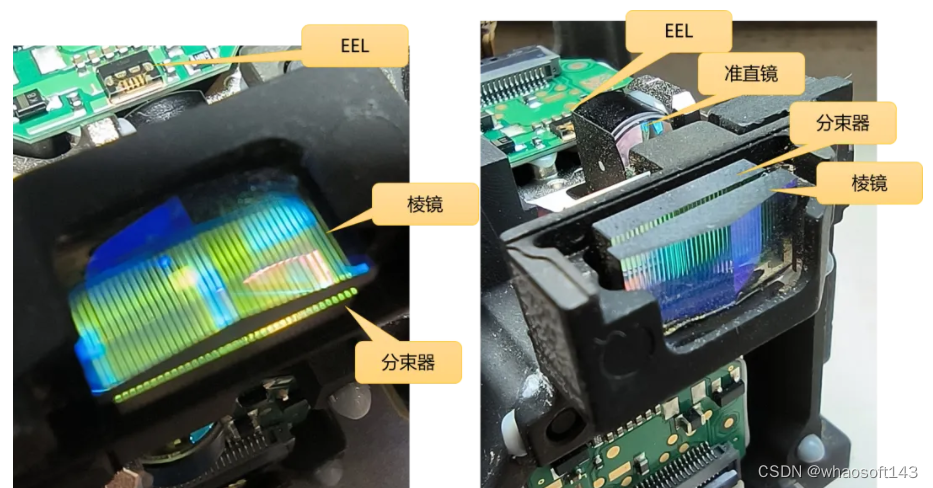
接收光路
接收器主要包括接收镜头、滤光片和SPAD等,由于接收板是用胶粘在支架上,本次拆解并没有打开。下图是来自芝能智芯的拆解图片,显示是一颗来自索尼的SPAD传感器。
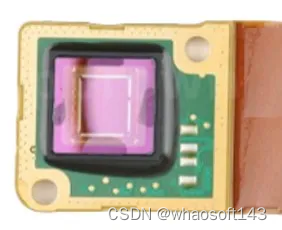
图片来源:芝能智芯
【4】主板
该雷达一共有2块主板,由于上面分别有TDA4和FPGA,因此暂时分别命名为TDA4主板和FPGA主板。
TDA4主板

- TPS6594-Q1:TI的具有五个降压稳压器和四个低压降稳压器的汽车类 2.8V 至 5.5V PMIC;
- LP8764-Q1:4 5-A/20-A multiphase buck converters PMIC for automotive SoCs;
- RTL9010:REALTEK的具备MACsec加解密功能的,车用高能效以太网PHY芯片;
TDA4AL Jacinto™ 处理器:

主要性能:
- 两个C7x浮点、矢量DSP,性能高达1.0GHz、160GFLOPS、512GOPS;
- 深度学习矩阵乘法加速器(MMA),性能高达8TOPS(8b)(频率为1.0GHz);
- 具有图像信号处理器(ISP)和多个视觉辅助加速器的视觉处理加速器(VPAC);
- 深度和运动处理加速器(DMPAC),双核64位Arm®Cortex®-A72微处理器子系统,性能高达2GHz–每个双核Cortex®-A72集群具有1MBL2共享缓存–每个Cortex®-A72内核具有32KBL1数据缓存和48KBL1指令缓存;
- 六个Arm®Cortex®-R5FMCU,1.0GHz–16K指令缓存,16K数据缓存,64KL2TCM–隔离MCU子系统中,有两个Arm®Cortex®-R5FMCU–通用计算分区中,有四个(TDA4VE)或两个(TDA4AL/TDA4VL)Arm®Cortex®-R5FMCU;
- GPU IMGBXS-4-64,256kB缓存,高达800MHz,50GFLOPS,4GTexels/s(TDA4VE和TDA4VL);
FPGA主板
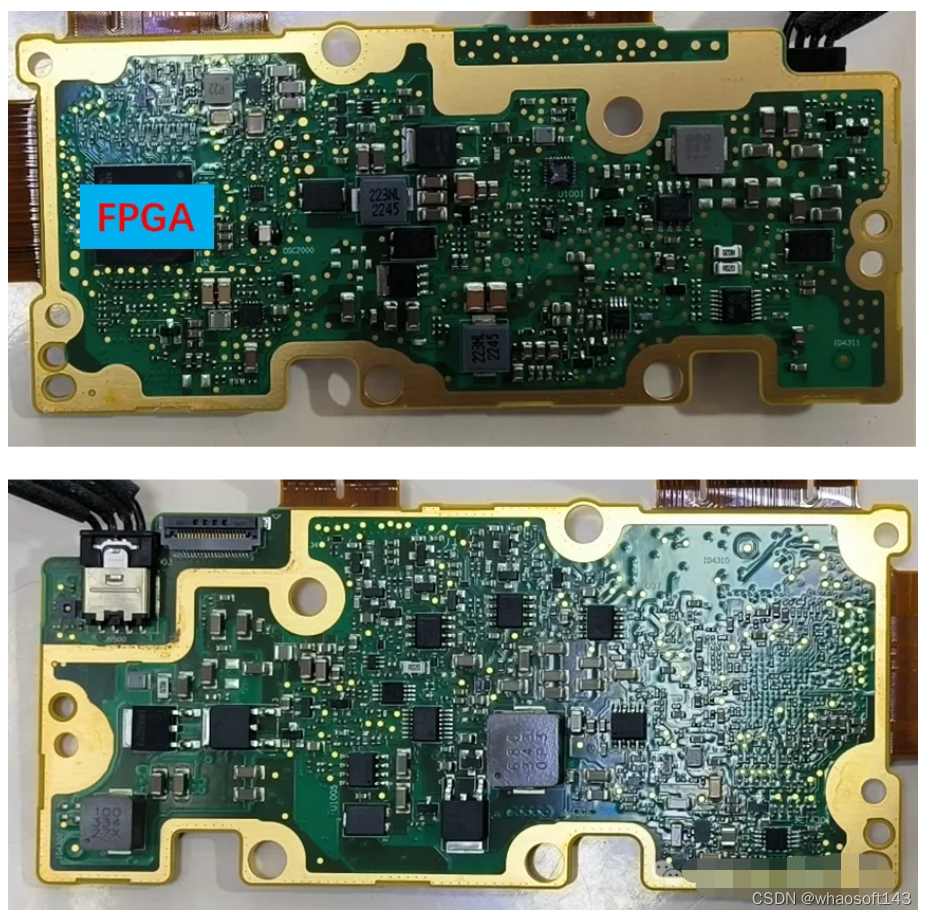
采用一片来自于LATTICE的低功耗FPGA:

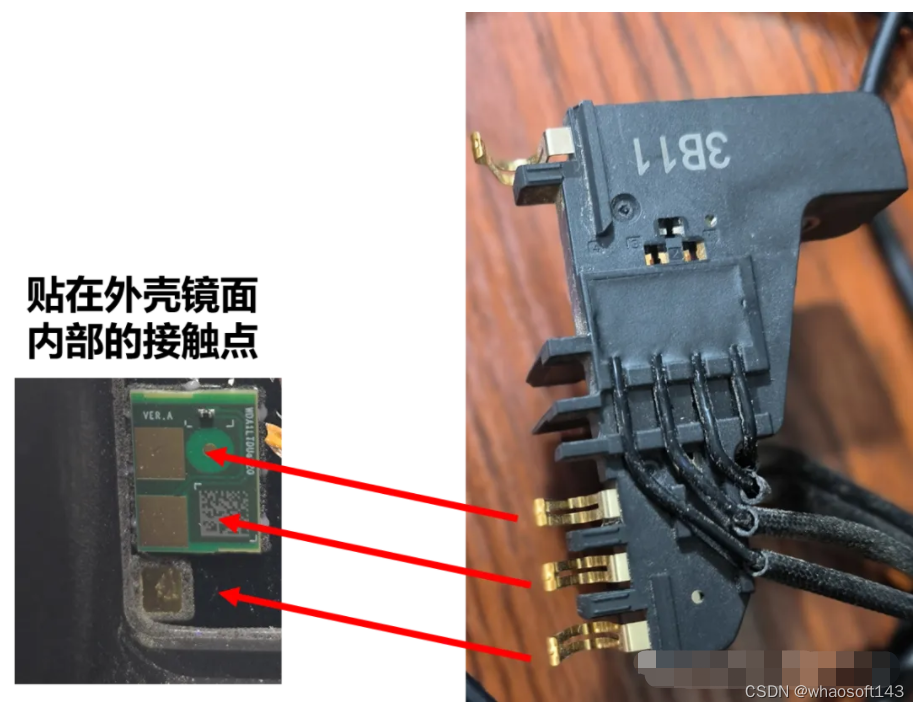
【5】其他部件
在镜面背部有4个接触点,在组装之后分别和电路板的4个弹簧触点接触,推测应该是加热丝的接口,用于加热视窗面,防止积雪。
四】华为96线激光雷达技术分析
对于华为96线激光雷达,分析如下:
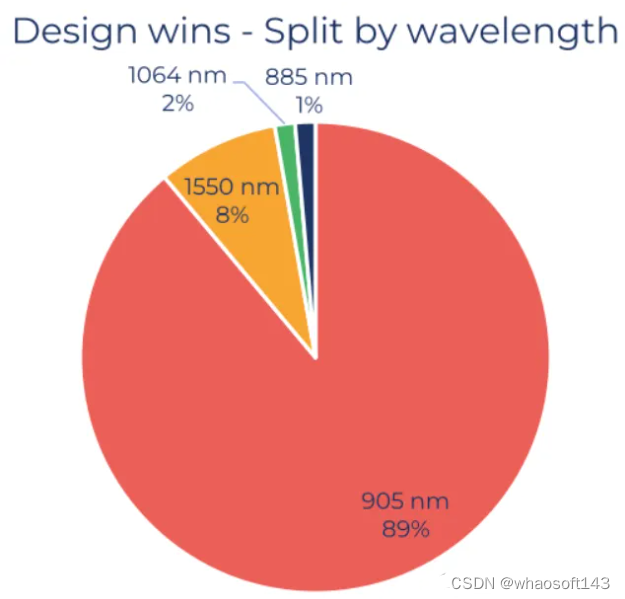
【1】华为96线激光雷达采用了905nm波长激光。905nm技术占据89%的市场份额,1550nm激光测距范围更远,但是成本较高。速腾M3和禾赛AT512分别采用了940nm和905nm技术,测距能力超过了现有的1550nm产品。
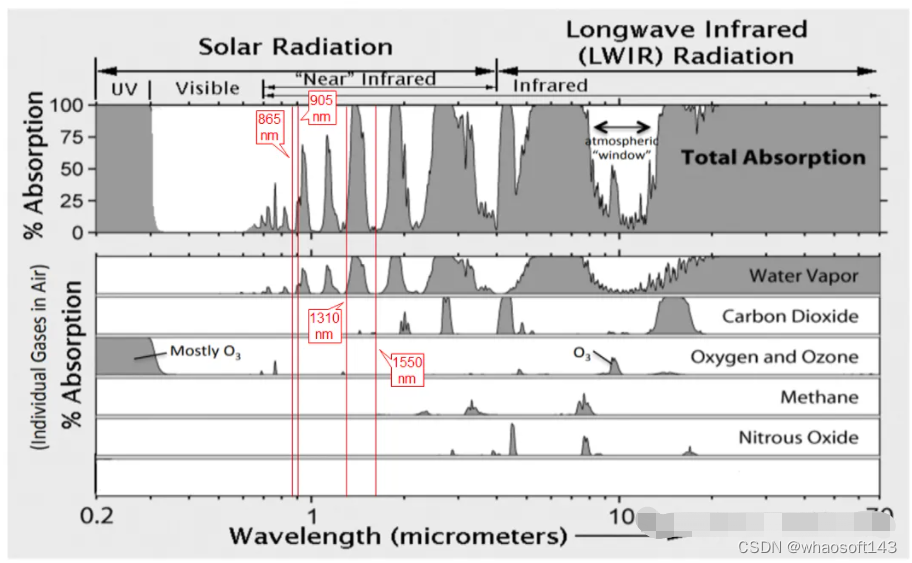
资料来源:San Francisco State University《Absorption Spectra_Atmosphere》
图达通之前主要使用1550nm技术,目前也推出905nm方案的Robin E产品。
图片来源:YOLO《Automotive LIDAR Market: Competitive Dynamics, Technology Evolution, and Revenue Trends》(Automotive LiDAR conference 2023, October 3-5 )
【2】华为96线激光雷达采用转镜+电子扫描方式,这种方式是目前半固态激光雷达较为主流的扫描方式。
转镜是目前应用最广的路线,包括禾赛、华为、图达通、镭神智能等大多数厂商都有采用转镜路线的产品。转镜路线的核心要素是电机控制,以及针对特定波长高反射率的镀膜反射镜。
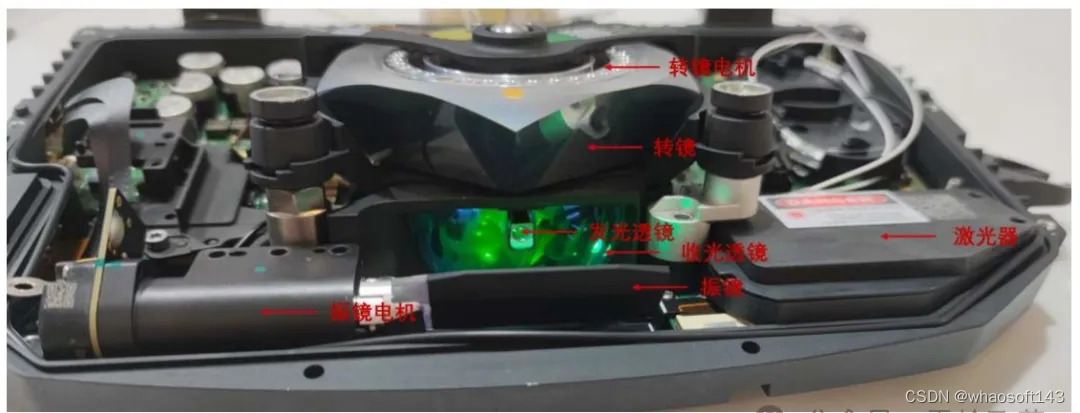
转镜一般搭配振镜或者线光源实现激光扫描,其中,转镜用于水平扫描,振镜或者线光源用于垂直扫描。因此,“转镜+振镜”也被常被称为2维扫描,“转镜+线光源”被称为1维扫描或者1维扫描+电子扫描。
“转镜+线光源”的优势在于发射的是连续的线光斑,因此垂直方向的分辨率非常高。禾赛AT128的转镜+电子扫描:

图片来源:禾赛
图达通falcon激光雷达采用“转镜+振镜”方案,该方案灵活度较高,通过改变转镜和振镜的转速,能够设计灵活的ROI。
图片来源:中信证券
MEMS振镜是另一种扫描路线,主要是速腾聚创在使用,体积较小。由于MEMS微振镜口径较大,但在极端振动条件下使用时,良率较低,MEMS方案可能会被逐渐放弃,速腾聚创在下一代的M3产品中也由MEMS改为了转镜+电子扫描方式。
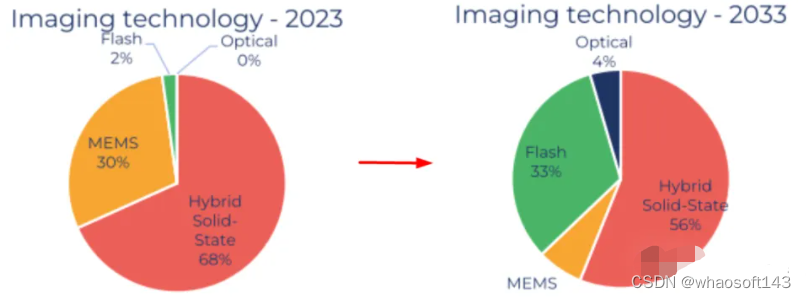
图片来源:YOLO《Automotive LIDAR Market: Competitive Dynamics, Technology Evolution, and Revenue Trends》(Automotive LiDAR conference 2023, October 3-5 )
速腾M1P的MEMS扫描:
图片来源:速腾聚创
【3】华为96线激光雷达发射光路和接收光路是非同轴的,使用各自的透镜,即旁轴光路,该光路优点是成像清晰程度较高,缺点是近场盲区较大。
目前速腾、禾赛等产品基本都是采用同轴光路。同轴光路是收发共用一组透镜,检测更为直接,易于对光路进行校准,近场盲区小。缺点是成本稍高,内部结构稍复杂,而且成像清晰程度比独立的旁轴成像要稍差。
禾赛的AT128的同轴光路:
图片来源:绿芯频道
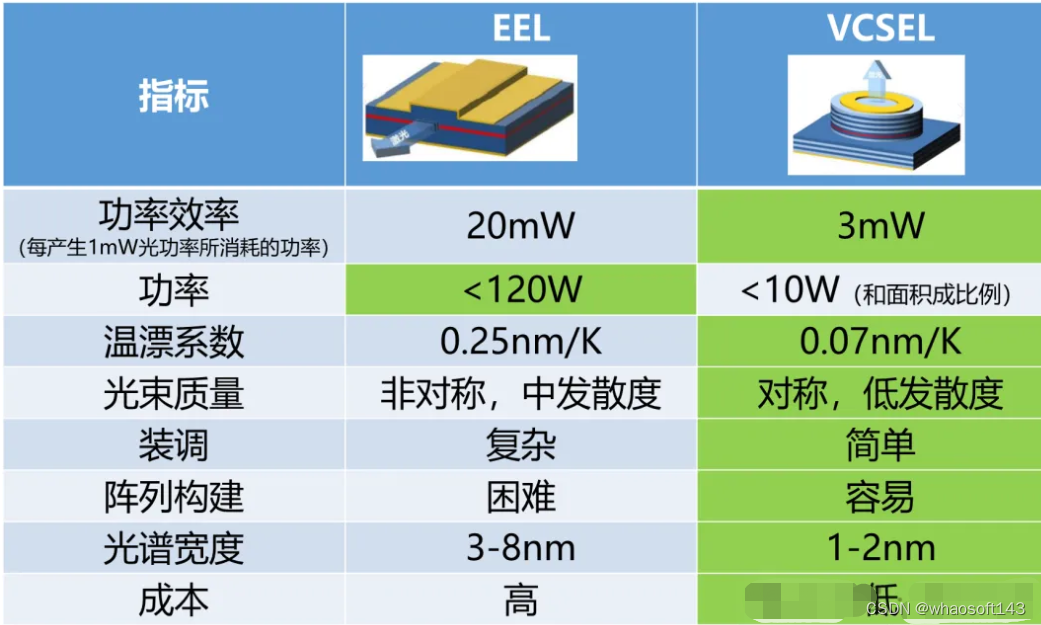
【4】华为96线激光雷达采用EEL激光器。近些年,多家激光器公司开发多层VCSEL激光器,将发光功率密度提升了5-10倍,凭借在成本及性能方面的优势,从目前趋势来看,VCSEL正逐步取代EEL。华为的下一代192线激光雷达,也采用了VCSEL激光器。
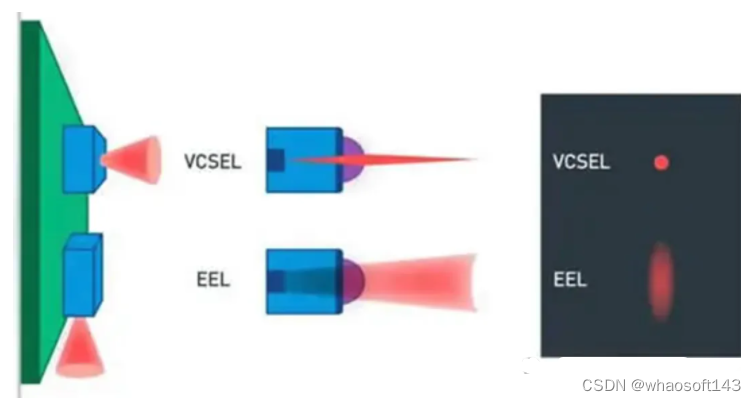
EEL和VCSEL的指标对比:
【5】华为96线激光雷达采用SPAD作为接收器。在905nm路线下,SPAD/ SiPM替代 APD 已成大势。SPAD/SiPM面临的一个比较明显的挑战是自然光干扰,尤其是强烈日光的干扰。强烈的阳光入射会导致 SPAD单元饱和,并且在恢复初始状态前都无法吸收光子,因而有可能漏掉真正的反射信号。
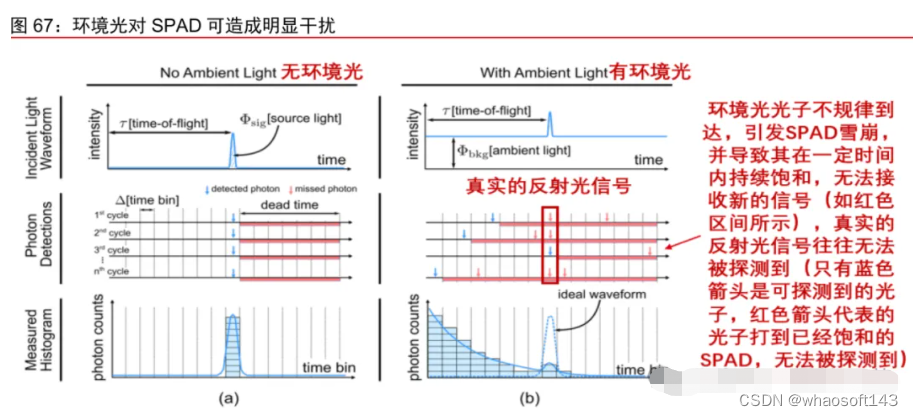
资料来源:Anant Gupta et al.《Photon-Flooded Single-Photon 3D Cameras》,arxiv,中信证券研究部
所以在强烈的日光下,使用 SPAD/SiPM 的激光雷达经常会出现探测距离明显下降的问题。虽然目前已有一些算法进行日光干扰的处理,但往往效果并不完美,有时还会引入额外噪声,所以 SPAD 对自然光的处理还有一些挑战。
【6】华为96线激光雷达处理器采用了TDA4和FPGA,分立程度较高。目前激光雷达的一个发展方向是采用集成度越来越高的SoC,将SPAD、TIA、ADC 等都集成到 SoC 中,进一步降低成本,提升性能。具行业消息,禾赛AT512和一径科技的EZ6已经采用了集成度相当高的SoC处理器。
来源:禾赛科技招股书
【五】总结
华为96线激光雷达发布于2020年,虽然从指标上看,比现在的主流产品稍显落后,不过在相当多的技术方案上,和目前主流的激光雷达发展方向契合。
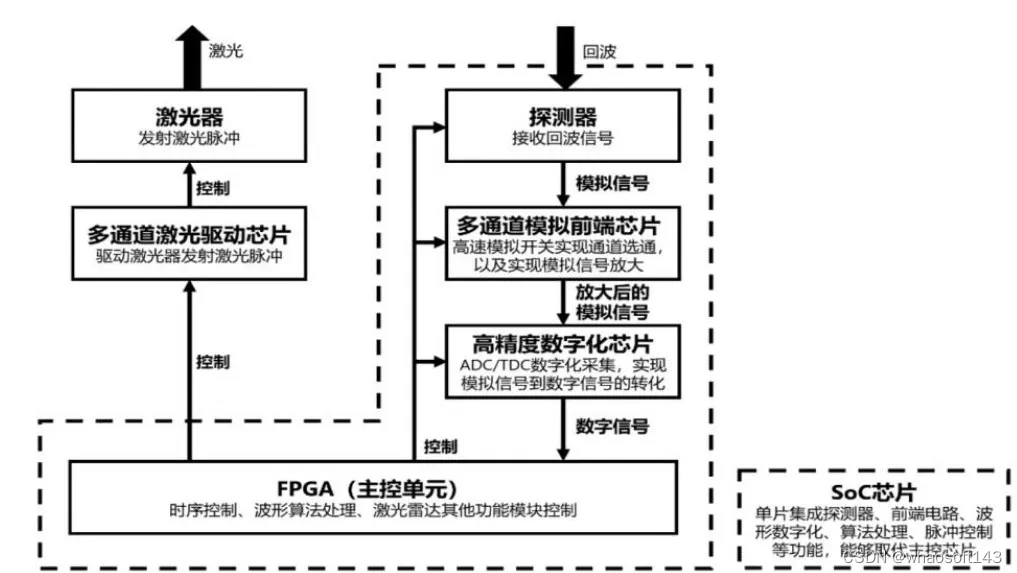
2023年12月26日,华为发布192线激光雷达。

华为192线激光雷达采用VCSEL+SPAD收发链路,以及转镜+电子扫描架构。具体参数:
- 测距:250米(最远),180米(10%反射率)
- 点云密度:184万点/秒
- 水平角分辨率:0.25°(@20Hz扫描),0.125°(@10Hz扫描)
- 垂直分辨率:0.1°
- 扫描频率:最高20Hz
参考资料:
- 中信证券,激光雷达产业深度研究:从拆解五款激光雷达看智能驾驶投资机遇,https://zhuanlan.zhihu.com/p/568700438
- 传感器专家网,暴涨450%,超71万台!中国激光雷达遥遥领先!网友:被制裁不冤
- Yvon Shong,聚焦激光雷达(四)——光学系统,https://zhuanlan.zhihu.com/p/622652543
- 芝能智芯,华为96线激光雷达拆解, https://www.ednchina.com/technews/24691.html
- 速腾聚创官网
- 禾赛科技官网
- 图达通官网















 1075
1075

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









