




 本文探讨了机器人运动过程中梯形和S型速度曲线的差异,指出S型曲线能减少对电机和传动系统的冲击,但所需时间更长。通过实例分析了最大速度V=50mm/s,最大加速度a=10mm/s²,最大加加速度aa=4mm/s³条件下,两种曲线在500mm距离的运动表现。后续内容将在运动学轨迹规划(二)中展开,涉及插补及特殊情况下的S型曲线处理。
本文探讨了机器人运动过程中梯形和S型速度曲线的差异,指出S型曲线能减少对电机和传动系统的冲击,但所需时间更长。通过实例分析了最大速度V=50mm/s,最大加速度a=10mm/s²,最大加加速度aa=4mm/s³条件下,两种曲线在500mm距离的运动表现。后续内容将在运动学轨迹规划(二)中展开,涉及插补及特殊情况下的S型曲线处理。
对于一个机器人系统,一般都会经历加速、匀速、减速的运动过程。在整个运动过程中,速度随时间的变化曲线称为速度曲线。常见的速度曲线主要有:梯形曲线(T型)、S型曲线(S)、多项式曲线等。
对于一个梯形速度曲线,主要包括匀加速、匀速、匀减速过程。对于S型速度曲线,一般主要包括加加速、匀加速、减加速、匀速、加减速、匀减速、减减速,一共7段,所以一般又称为7段式。
同梯形速度曲线相比,S型速度曲线对电机和传动系统的冲击伤害会更小,但是在相同的最大速度和最大加速度喜爱,S型速度曲线在运动相同的位移下,其时间要更长。
下图一(figure1)和图二(figure2)分别是在运动相同的距离,设定相同的最大速度和最大加速度条件下的梯形速度曲线和S型速度曲线。在本文里,设定最大速度V=50mm/s,最大加速度a=10mm/s2, 运动距离L=500mm, 对于S型速度曲线而言,设定最大加加速度(又称jerk,加速度的导数)aa=4mm/s3。
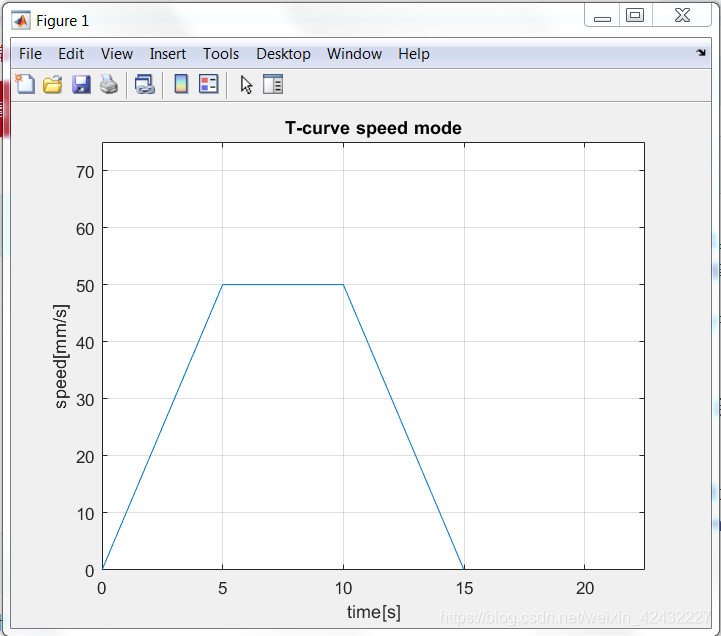
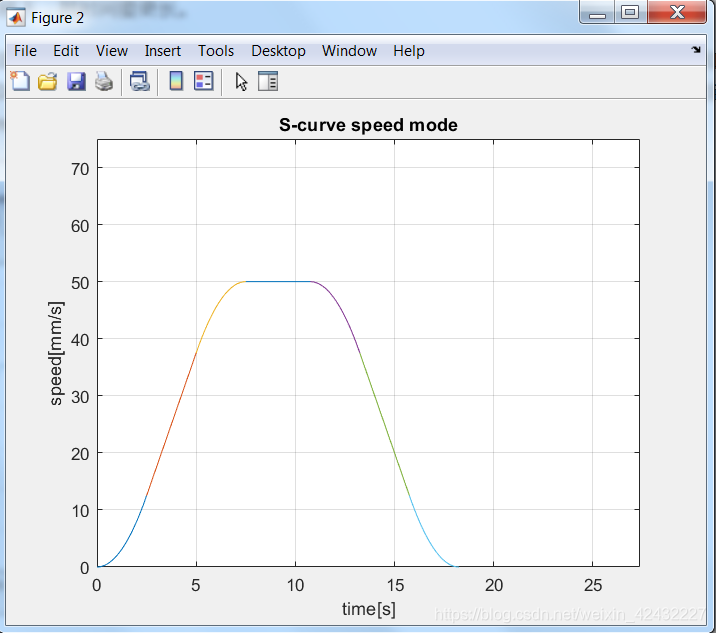
可以看出,figure2运行相同的距离比figure1要长。但正如上文所介绍,梯形曲线相对于S型曲线对电机的冲击要大的多,上面两图的Matlab代码如下:
clc;clear;
%% input parameters
V = 50; %% max speed
a = 10; %% max acceleration
L = 500; %% Distance
aa =4; %% jerk aa = d(a)/dt f 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 528
528

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









