







Unet模型及代码解析
Paper:http://www.arxiv.org/pdf/1505.04597.pdf
Code:https://github.com/jakeret/tf_unet
一个U型网络结构,2015年在图像分割领域大放异彩,unet被大量应用在分割领域。它是在FCN的基础上构建,它的U型结构解决了FCN无法上下文的信息和位置信息的弊端。
模型
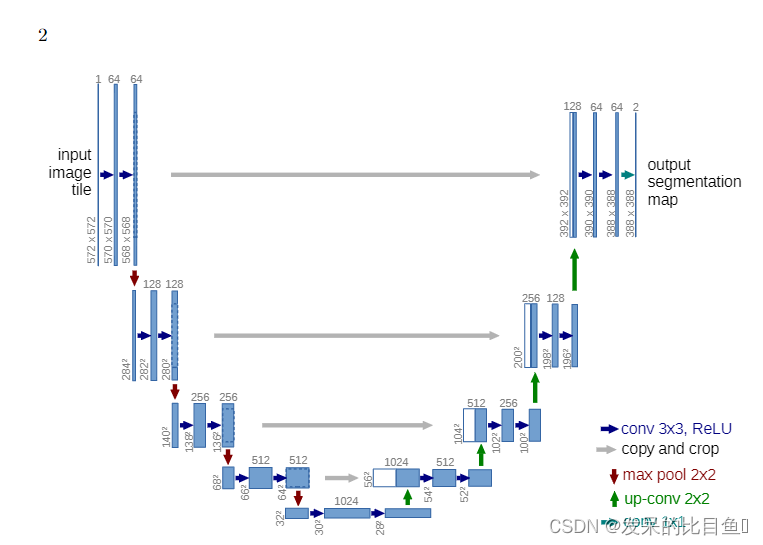
主干结构解析
左边为特征提取网络(编码器),右边为特征融合网络(解码器)
高分辨率—编码—低分辨率—解码—高分辨率
前半部分是编码, 它的作用是特征提取(获取局部特征,并做图片级分类),得到抽象语义特征
由两个3x3的卷积层(RELU)再加上一个2x2的maxpooling层组成一个下采样的模块,一共经过4次这样的操作
后半部分利用前面编码的抽象特征来恢复到原图尺寸的过程, 最终得到分割结果(掩码图片)。由一层反卷积+特征拼接concat+两个3x3的卷积层(ReLU)反复构成,一共经过4次这样的操作,与特征提取网络刚好相对应,最后接一层1*1卷积,降维处理,即将通道数降低至特定的数量,得到目标图。
FCN与UNet特征融合操作对比解析
- FCN是通过特征图对应像素值的相加来融合特征的, 利用上采样对最后一层特征图进行上采样的话,会损失很多细节,边缘模糊,使用跳跃结构,将最后一层的预测(有丰富的全局信息)和更浅层(有更多的局部细节)的预测结合起来(sum 方式),可以恢复细节信息。
上采样
上采样的三种方式
(1)双线性插值:特点是不需要进行学习,运行速度快,操作简单
(2)反卷积:也叫转置卷积,外圈或中间补零
(3)反池化:记录池化过程中元素在对应 kernel 中的坐标,作为反池化的索引
代码
import torch
from torch import nn
from torch.nn import functional as F#插值法上采样
class Conv_Block(nn.Module):
def __init__(self,in_channel,out_channel):
super(Conv_Block, self).__init__()
self.layer=nn.Sequential(
nn.Conv2d(in_channel,out_channel,3,1,1,padding_mode='reflect',bias=False),#卷积3*3,步长为1,padding为1
nn.BatchNorm2d(out_channel),
nn.Dropout2d(0.3),
nn.LeakyReLU(),
nn.Conv2d(out_channel, out_channel, 3, 1, 1, padding_mode='reflect', bias=False),
nn.BatchNorm2d(out_channel),
nn.Dropout2d(0.3),
nn.LeakyReLU()
)
def forward(self,x):
return self.layer(x)
class DownSample(nn.Module):#池化(下采样)
def __init__(self,channel):
super(DownSample, self).__init__()
self.layer=nn.Sequential(#序列构造器
nn.Conv2d(channel,channel,3,2,1,padding_mode='reflect',bias=False),#这里不采用最大池化,最大池化特征丢失太多,所以采用步长为2
nn.BatchNorm2d(channel),
nn.LeakyReLU()
)
def forward(self,x):
return self.layer(x)
class UpSample(nn.Module):#上采样
def __init__(self,channel):
super(UpSample, self).__init__()
self.layer=nn.Conv2d(channel,channel//2,1,1)#1*1卷积,降低通道,无需特征提取,只是降通道数
def forward(self,x,feature_map):
up=F.interpolate(x,scale_factor=2,mode='nearest')#最邻近插值法
out=self.layer(up)
return torch.cat((out,feature_map),dim=1)
class UNet(nn.Module):
def __init__(self,num_classes):
super(UNet, self).__init__()
self.c1=Conv_Block(3,64)
self.d1=DownSample(64)
self.c2=Conv_Block(64,128)
self.d2=DownSample(128)
self.c3=Conv_Block(128,256)
self.d3=DownSample(256)
self.c4=Conv_Block(256,512)
self.d4=DownSample(512)
self.c5=Conv_Block(512,1024)
self.u1=UpSample(1024)
self.c6=Conv_Block(1024,512)
self.u2 = UpSample(512)
self.c7 = Conv_Block(512, 256)
self.u3 = UpSample(256)
self.c8 = Conv_Block(256, 128)
self.u4 = UpSample(128)
self.c9 = Conv_Block(128, 64)
self.out=nn.Conv2d(64,num_classes,3,1,1)
def forward(self,x):
R1=self.c1(x)
R2=self.c2(self.d1(R1))
R3 = self.c3(self.d2(R2))
R4 = self.c4(self.d3(R3))
R5 = self.c5(self.d4(R4))
O1=self.c6(self.u1(R5,R4))
O2 = self.c7(self.u2(O1, R3))
O3 = self.c8(self.u3(O2, R2))
O4 = self.c9(self.u4(O3, R1))
return self.out(O4)
if __name__ == '__main__':
x=torch.randn(2,3,256,256)
net=UNet()
print(net(x).shape)















 359
359











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









