







本文介绍在安装mmdetection3d目标检测框架的流程,MMdetection3D是一个通用的3D目标检测框架,支持单目、双目、RGB-D等多种传感器的数据,支持多种算法,包括VoteNet、MVXNet、Part-A2、PointPillars等,可以覆盖单模态和多模态检测,室内和室外场景SOTA。
安装之前一定要确认好自己的cuda版本!!
官方文档要求
MMDetection3D 支持在 Linux,Windows(实验性支持),MacOS 上运行,它需要 Python 3.7 以上,CUDA 9.2 以上和 PyTorch 1.6 以上。
1. 在服务器创建虚拟环境(已有anaconda的前提下)
conda create -n mm3d python=3.7 - y
conda activate mm3d
如果你没有anaconda,需要安装点此下载安装
2. 下载安装pytorch
从pytorch官方点此安装pytorch安装对应自己cuda版本的pytorch,这个很重要,要不然后面会报错。

conda install pytorch==1.13.1 torchvision==0.14.1 torchaudio==0.13.1 pytorch-cuda=11.6 -c pytorch -c nvidia
我这里cuda是11.6版本,所以我下载了对应版本的pytorch。
3. 使用 MIM 安装 MMEngine,MMCV 和 MMDetection
pip install -U openmim
mim install mmengine
mim install 'mmcv>=2.0.0rc4'
mim install 'mmdet>=3.0.0'
4. 安装MMDetection3D
git clone https://github.com/open-mmlab/mmdetection3d.git -b dev-1.x
# "-b dev-1.x" 表示切换到 `dev-1.x` 分支。
cd mmdetection3d
pip install -v -e .
# "-v" 指详细说明,或更多的输出
# "-e" 表示在可编辑模式下安装项目,因此对代码所做的任何本地修改都会生效,从而无需重新安装。
5. 下载模型权重测试
mim download mmdet3d --config pointpillars_hv_secfpn_8xb6-160e_kitti-3d-car --dest
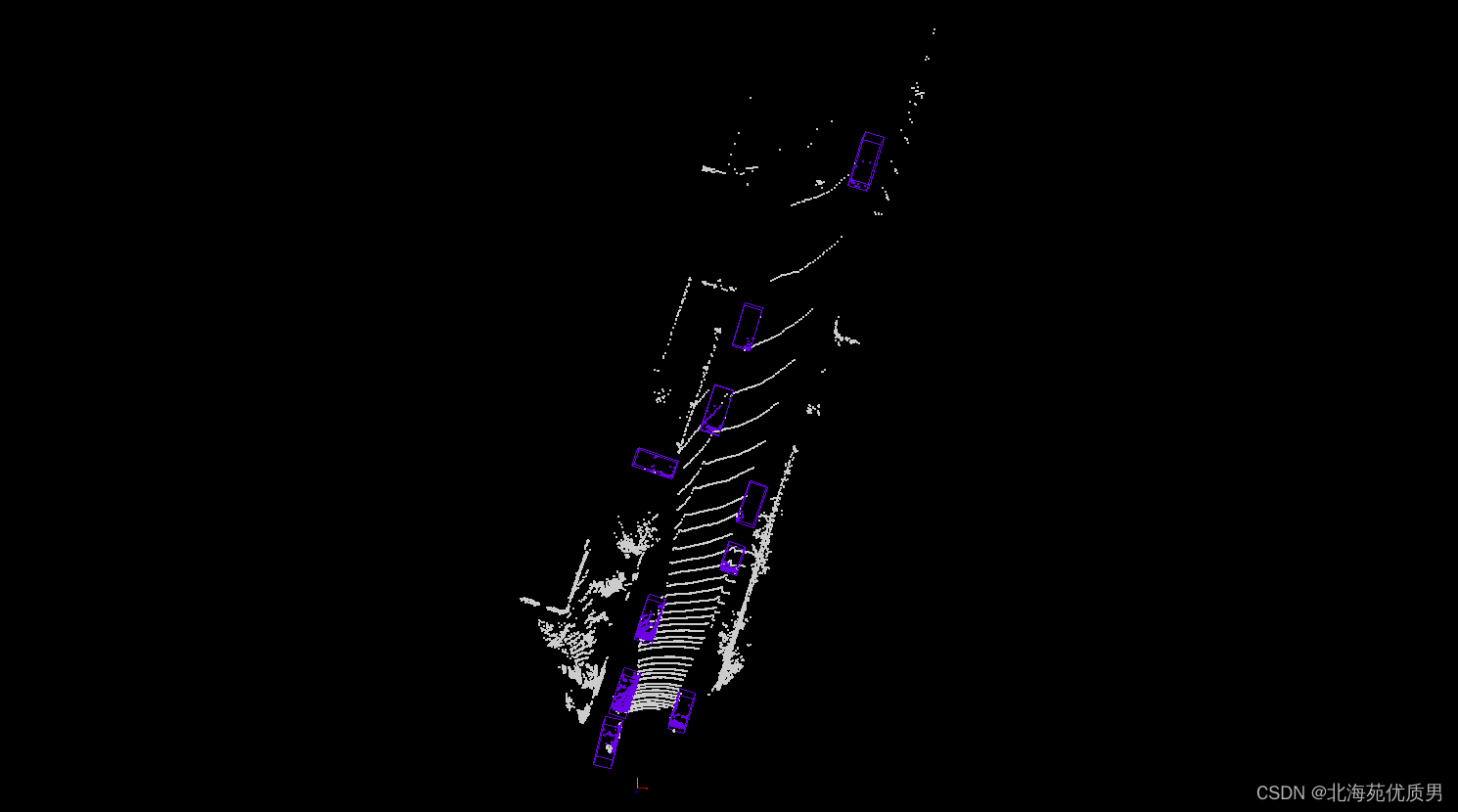
运行下面代码进行推理验证
python demo/pcd_demo.py demo/data/kitti/000008.bin pointpillars_hv_secfpn_8xb6-160e_kitti-3d-car.py hv_pointpillars_secfpn_6x8_160e_kitti-3d-car_20220331_134606-d42d15ed.pth --show
运行结果
大家在安装的过程中一定要好好看一遍官方要求,一步错步步错。















 3421
3421











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









