







STM32固件库(标准外设库)入门学习 第五章 EXTI中断(二)
文章目录
前言
本学习教程,参考B站江科大自化协STM32视频,型号为STM32F103C8T6。
什么样得设备需要用到外部中断,外部中断得好处?若STM32想要获取的信号,是外部驱动得很快的突发信号,比如:
(1)旋转编码器的输出信号,可能很久不去拧它,这时不需要STM32做任何事情,但是我一拧它就会产生很多脉冲波形需要STM32接收,这个信号是突发的,STM32不知道什么时候会来,同时它是外部驱动,STM32只能被动读取,最后这个信号非常快,STM32稍微晚一些,就会错过很多波形,对于这种情况来说,就可以考虑使用STM32的外部中断了。有脉冲过来,STM32立即进入中断函数处理,无脉冲来,STM32就专心做其他事情。
(2)红外遥控接收头的输出,接收到遥控数据后,他会输出一端波形,这个波形转瞬即逝,所以就需要用外部中断读取。
(3)按键,虽然它的动作也是外部驱动突发事件,但并不推荐用外部中断来读取按键,因为外部中断不好处理按键抖动和松手检测的问题,对于按键来说,输出波形也不是转瞬即逝的,要求不高的话可以在主程序中循环读取,若不想用此方法,可以考虑用定时器中断读取方式,这样既可以后台读取按键值、不阻塞主程序,也可以很好的处理按键抖动和松手检测的问题。
一、旋转编码器简介
旋转编码器:用来测量位置、速度或旋转方向的装置,当其旋转轴旋转时,其输出端可以输出与旋转速度和方向对应的方波信号,读取方波信号的频率和相位信息即可得知旋转轴的速度和方向。
类型:机械触点式、霍尔传感器式、光栅式。

左1图用了对射式红外传感器来测速,为了测速,还需要配合一个这样的光栅编码盘,编码盘转动时,红外传感器的红外光就会出现遮挡、透过、遮挡、透过这样的现象,对应模块输出的电平就是高低电平交替的方波,方波的个数代表转过的角度,方波的频率代表转速。就可以用外部中断来捕获这个方波的边沿,以此判断位置和速度。这个模块只有一路输出,正转翻转输出波形无法区分,所以不能测旋转方向。为了进一步测旋转方向,可以用后面几种编码器。
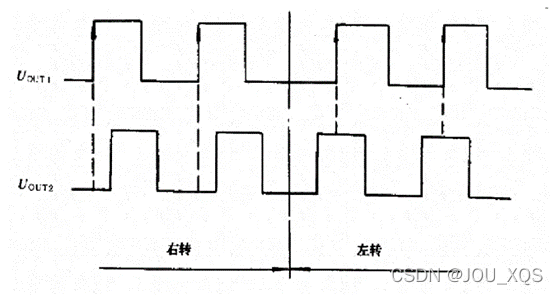
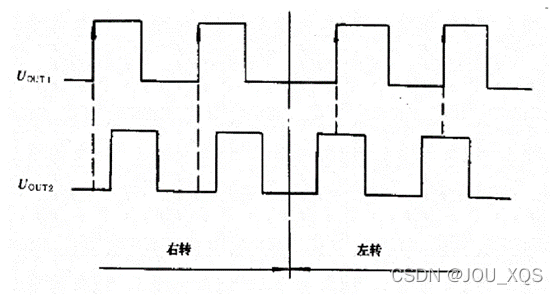
2图为旋转编码器左为外观,右为内部拆解结构。内部用金属触点进行通断,所以时一种机械触点式编码器,这种方式可用来调节音量等,不适合电机这种高速旋转的地方。左右是两部分开关触点,其中内侧的这两根细的触点,和中间引脚(c上方)连接,外侧左边的接左引脚,右边的连右引脚。中间圆的金属片是一个按键。这个旋转编码器的轴式可以按下去的,按键的两根线,在上面印出来,轴按下,上面两根线短路,松手,上面两根线断开,就是一个普通按键。再看一下编码盘,也是一系列像光栅一样的东西,只不过这是金属触点,旋转时,依此接通和断开两边的触点,还有个关键的部分是,金属盘的位置是经过设计的,他能让两侧触点的通断产生一个90度的相位差,最终配合外部电路,这个编码器的两个输出就会输出下图这样的波形,正转时,左边A相引脚输出一个方波波形,同时右侧B相,输出一个和他相位相差90度的波形,正向旋转时,B相输出滞后90度,返现旋转时,B相会提前90度。这样区分正转和反转,这种相位相差90度的波形就叫正交波形,这种编码器可以用来测方向的。也有编码器不是输出正交波形,一个引脚输出方波信号代表转速,另一个引脚输出高低电平代表旋转方向。
3图直接附在电机后面的编码器,这种事霍尔传感器形式的编码器,中间是一个圆形磁铁,边上有两个位置错开的霍尔传感器,当磁铁旋转时,通过霍尔传感器,就可以输出正交的方波信号。
4图就是一个独立的编码原件,输入轴转动时,输出就会有波形,这个也是可以测速和测方向的,具体用法看手册。
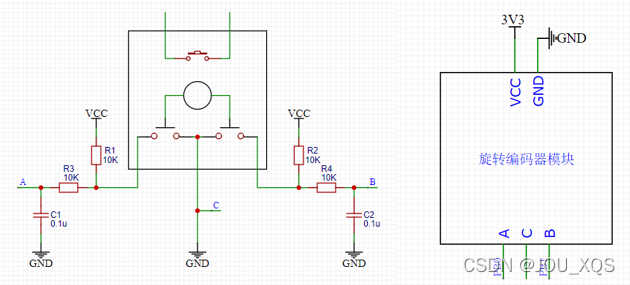
**编码器硬件电路。**因为只有开关信号,所以需要配合外围电路进行使用,左边接了10k的上拉电阻,默认没旋转的情况下,被上拉为高电平,通过R3电阻,输入A端口的也是高电平,旋转时,内部触点导通,被拉到GND,再通过R3输出,A端口就是低电平了。R3是一个输出限流电阻,它是为了防止模块引脚电流过大,C1为输出滤波电容,可防止一些输出信号抖动。
右侧使用电路图很简单。
NVIC是内核外设,要在cortex-M3编程手册找。
二、对射式红外传感器计次
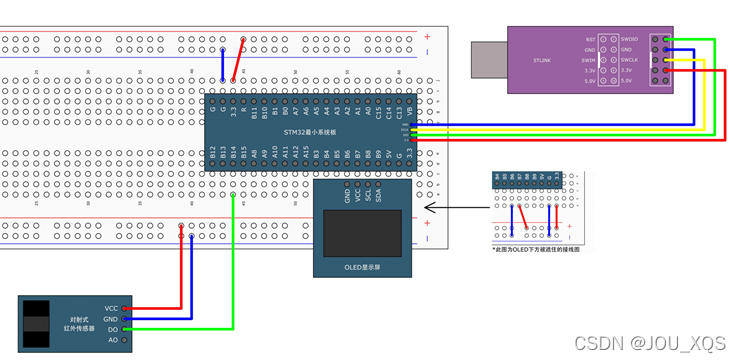
1.接线图
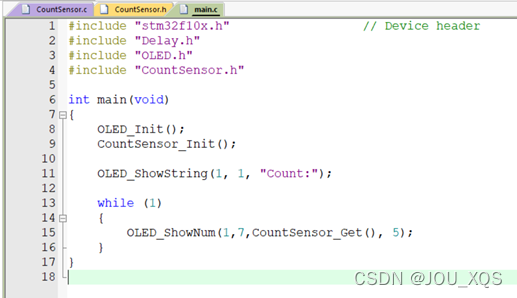
当挡光片或编码盘在这个对射式红外传感器中间经过时,DO就会输出电平跳变的信号,这个电平跳变的信号触发STM32 PB14号口的中断,在中断函数里,执行变量++的程序,然后主循环里调用OLED显示这个变量,这个程序就完成了。
2.配置外部中断
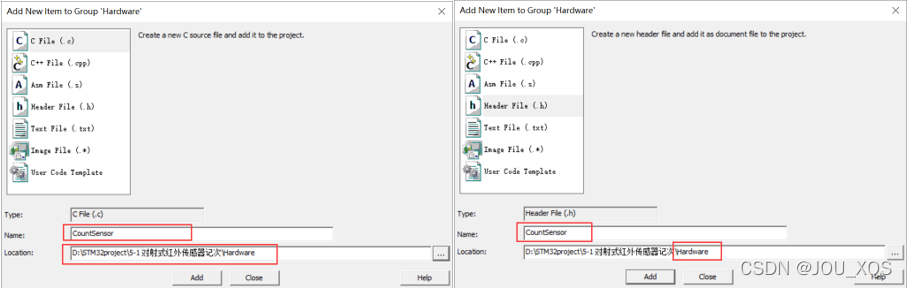
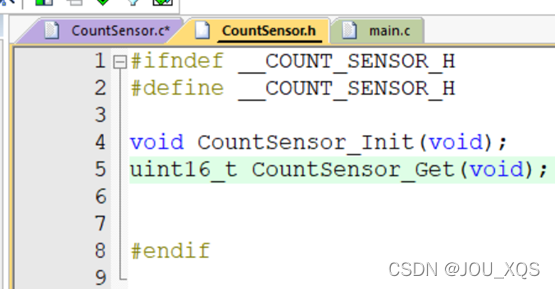
沿用上文OLED显示屏程序,把传感器的功能封装在一个模块里,Hardware文件下添加.c和.h文件CountSensor,并修改路径。
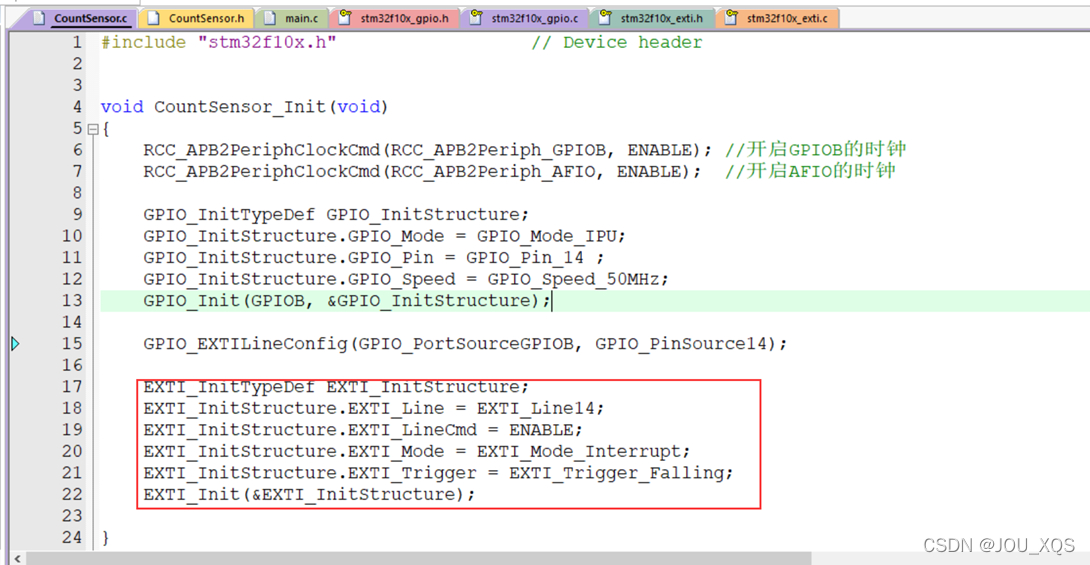
写上固定部分代码。

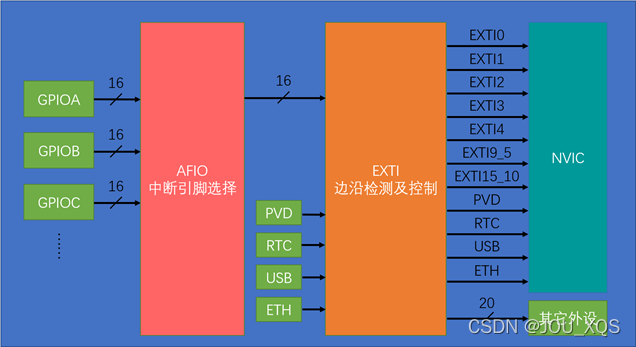
配置外部中断。看EXTI基本结构图,就知道要配置哪些东西了,简单来说就需要把外部中断从GPIO到NVIC这一路中出现的外设模块都配置好,把这条信号电路打通。
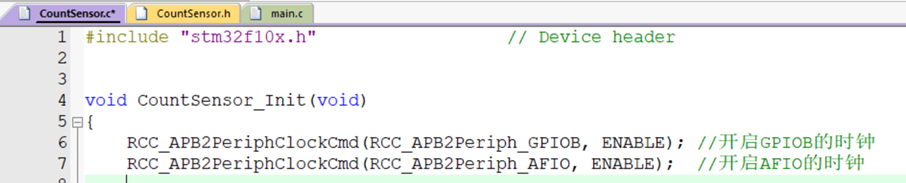
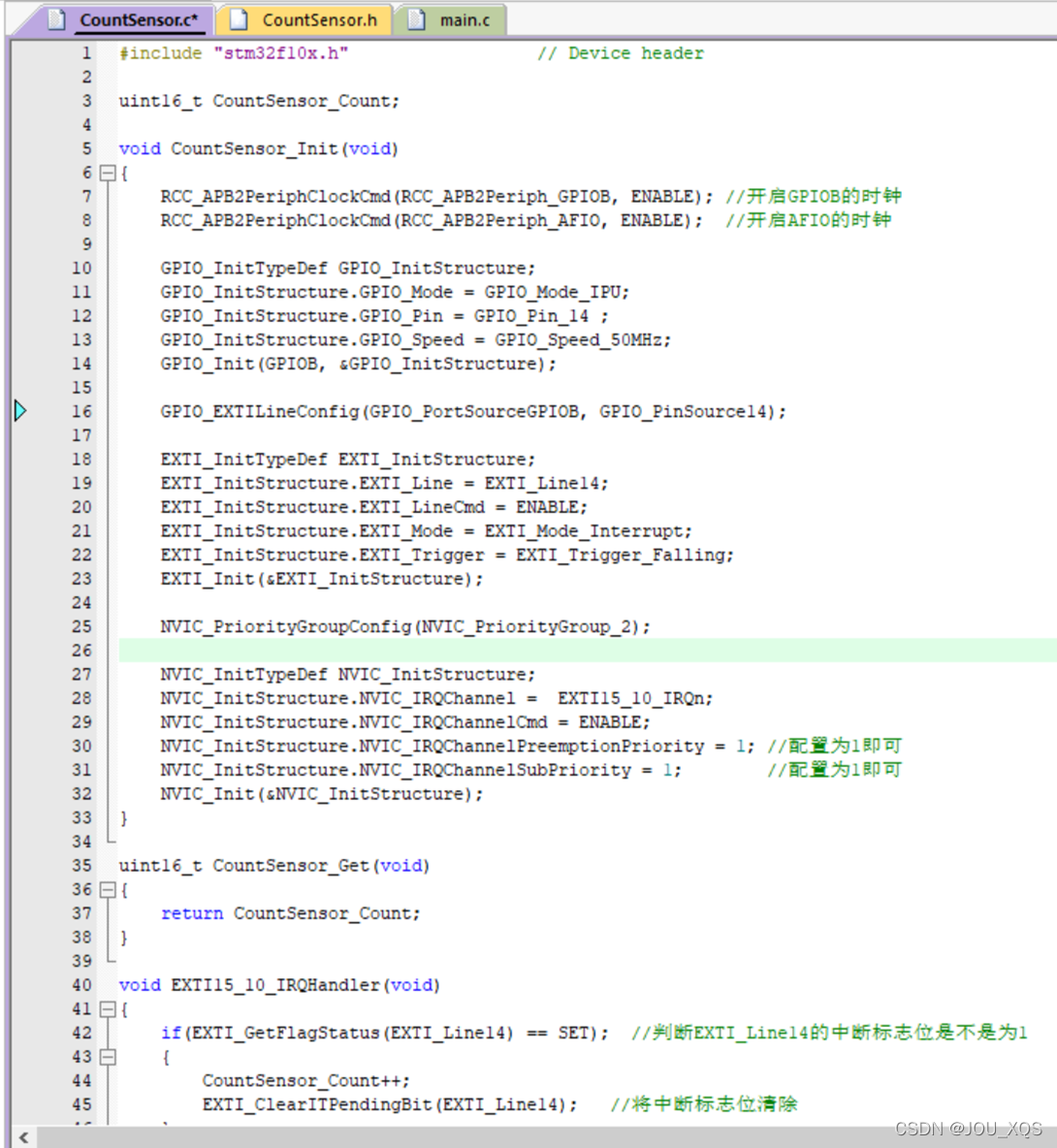
2.1 第一步配置RCC
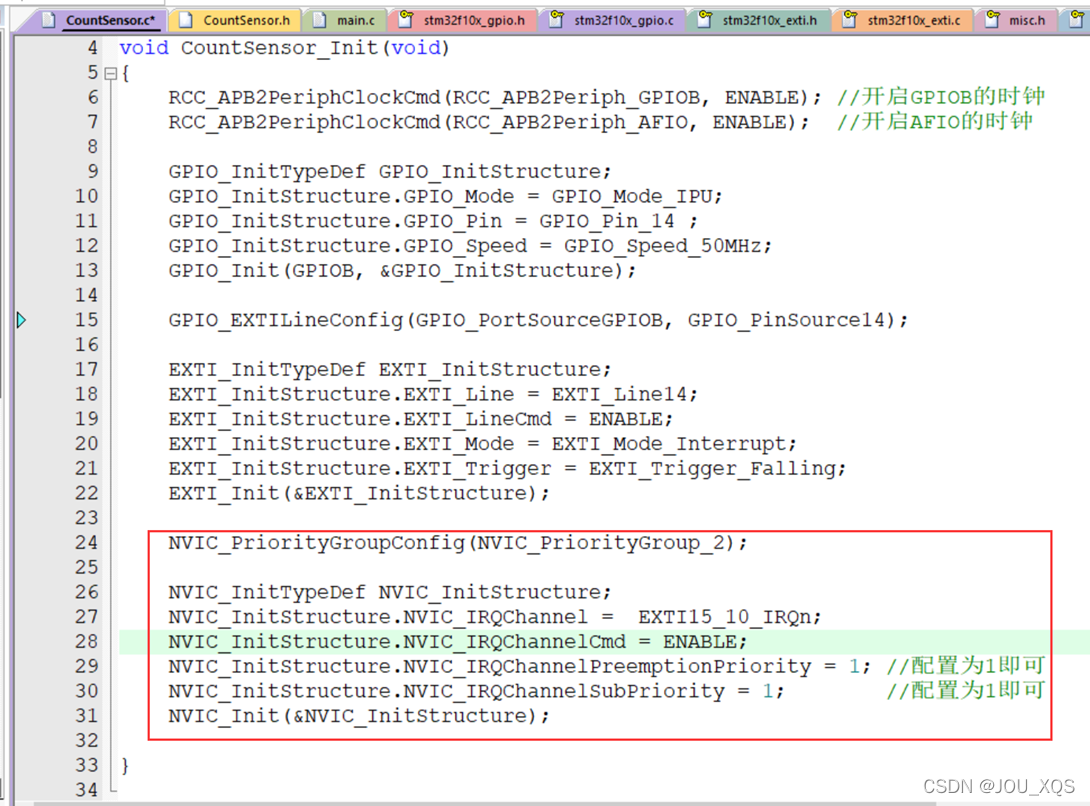
把所有涉及的外设时钟都打开。这里主要开GPIOB和AFIO的时钟,EXTI和NVIC默认是一直打开的,不需要我们再开启时钟。
注:EXTI作为一个独立外设,按理来说应该需要开启时钟,但是寄存器里却没有EXTI时钟的控制位,应该是与EXTI唤醒有关,或者是其他的一些电路设计上的考虑,只要知道不需要开启其时钟就可以了。NVIC也不需要开启时钟,是因为NVIC是内核的外设,内核的外设都不需要开启时钟,其与CPU一起住在皇宫里,而RCC管的都是内核外的外设,所以RCC管不着NVIC。
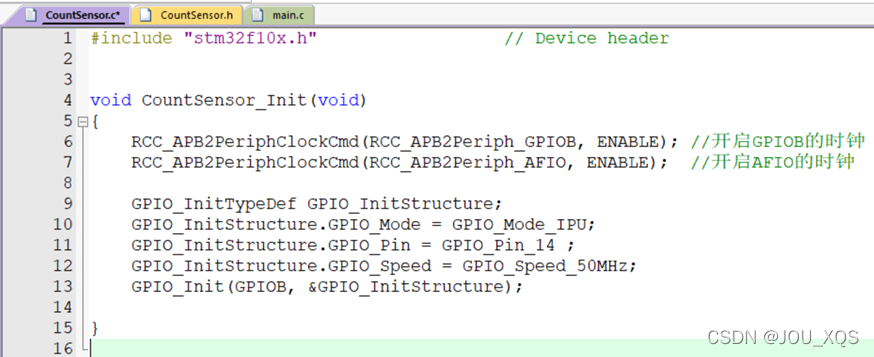
2.2 第二步配置GPIO
选择端口为输入模式。GPIO_Mode要选择浮空输入、上来输入或者下拉输入,这其中的一个模式,若不清楚,查阅参考手册8.1.11 外设的GPIO配置,里面有每个外设的各个引脚需要配置为什么模式。这里给上拉输入,默认为高电平的输入方式。

2.3 第三步配置AFIO
选择我们用的这一路GPIO,连接到后面的EXTI。AFIO外设,ST并未分配给他专门的库函数文件,其库函数与GPIO在一个文件里,从gpio.h文件看最后的库函数。之前在GPIO部分已经说过一些函数,今天看有关AFIO的。
GPIO_AFIODeInit用来复位AFIO外设,调用此函数,AFIO外设的配置就会全部清除;
GPIO_EventOutputConfig、GPIO_EventOutputCmd配置AFIO事件输出功能,用的不多;
GPIO_PinRemapConfig用于进行引脚重映射,第一个参数选择重映射的方式,第二个参数选择新的状态,使用简单,但是目前还未需要用到;
GPIO_EXTILineConfig比较重要,是本节外部中断需要用到的函数,调用此函数可以配置AFIO的数据选择器,来选择想要的中断引脚;
GPIO_ETH_MediaInterfaceConfig函数与以太网有关,这个芯片用不到。
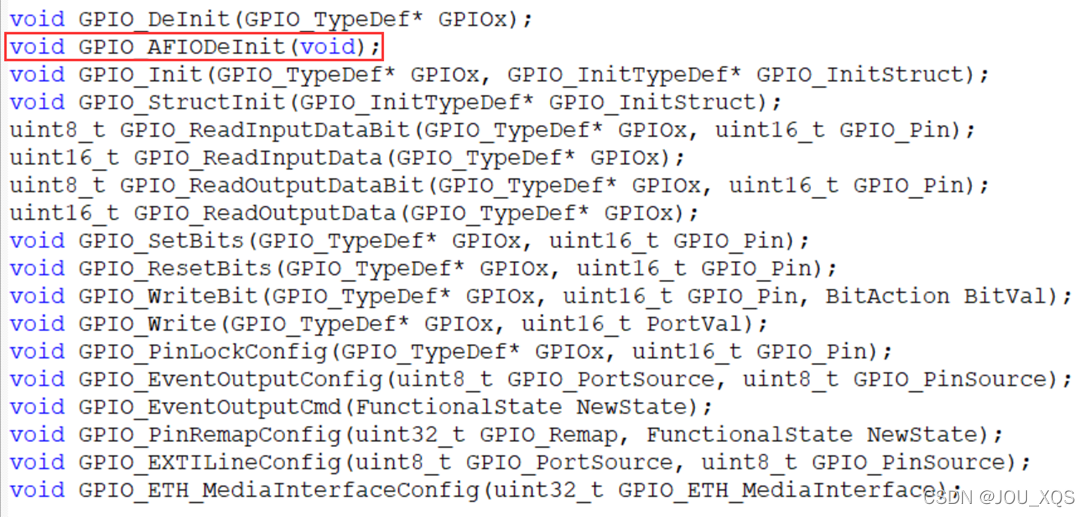
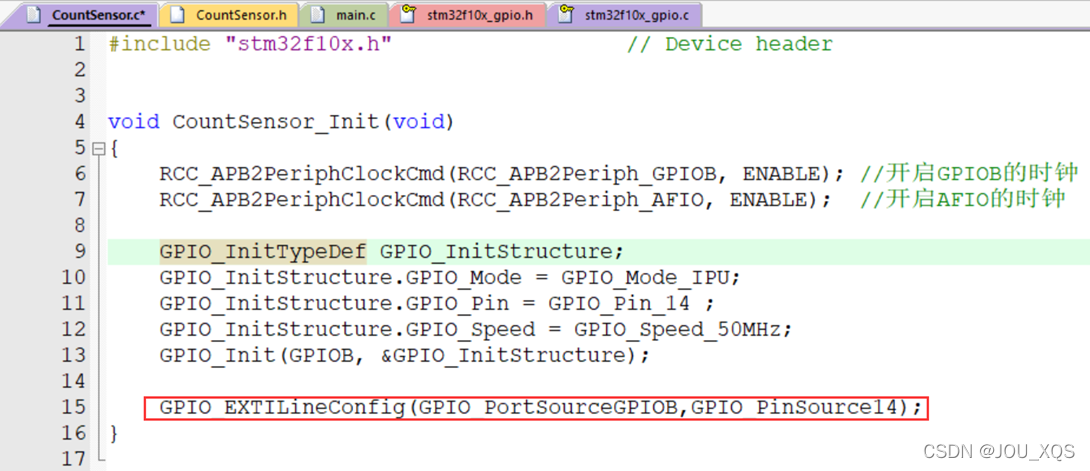
现在想要配置AFIO外部中断引脚选择,直接用GPIO_EXTILineConfig函数,这个函数虽然是GPIO开头的函数,但实际上里面操作的是AFIO的寄存器,所以这个函数实际上是AFIO的函数。配置这一个函数,就可以完成AFIO的配置,执行完这个函数后,AFIO的第14个数据选择器就拨好了,其中输入端被拨到GPIOB外设上,对应PB14号引脚,输出端固定连接EXTI的第14个中断线路,这样PB14号引脚的电平信号就可以顺利通过AFIO,进入到后级EXTI电路了。
2.4 第四步配置EXTI
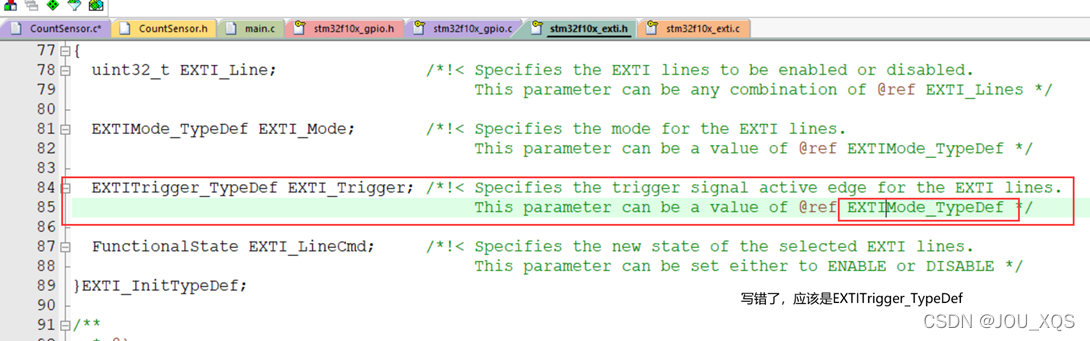
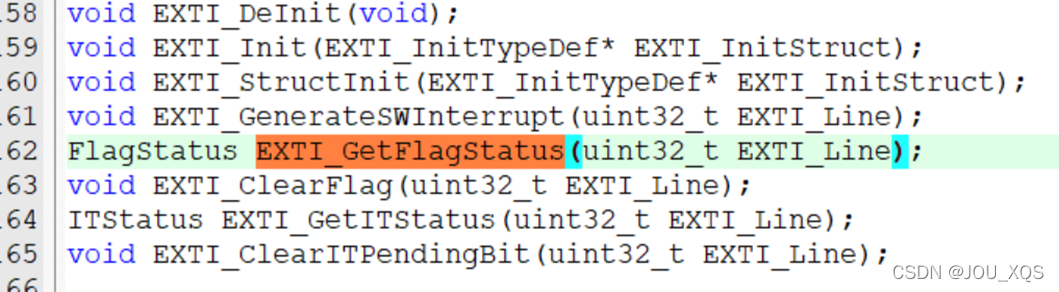
选择边沿触发方式,比如上升沿、下降沿或者双边沿。还要选择触发响应方式,可以选择中断响应和事件响应,一般为中断响应。看EXTI的库函数文件,看一些EXTI有哪些库函数可用,找到exti.h文件,拖到最后。
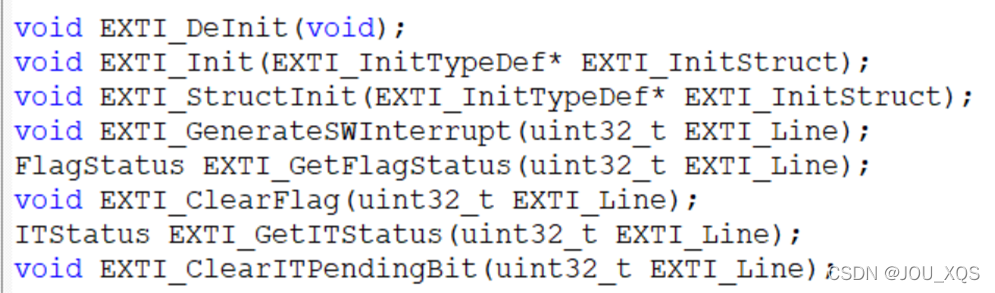
(1)EXTI_DeInit,调用此函数可以把EXTI配置清除,恢复成上电默认的状态;
(2)EXTI_Init,调用此函数可以根据结构体里的参数配置EXTI外设,初始化EXTI主要用的就是这个函数,使用方法与GPIO_Init一样;
(3)EXTI_StructInit,调用此函数可以把参数传递的结构体变量赋值一个默认值。
注:以上三个函数,基本所有外设都有,就像库函数的模板函数一样,基本每个外设都需要这些类型的函数,模板函数使用方法和意思也都一样,会使用一个,再见到这种函数就很容易的上手。当学GPIO的时候,觉得为啥要用结构体来初始化模块呢,还需要定义结构体,结构体赋值,然后再传递结构体的地址,简直太麻烦了。但当学习其他外设之后,就会发现,外部中断也是使用结构体初始化的方式、定时器也是、ADC也是、串口也是,都是一样的。而且结构体可以看到参数的名字,参数也是复制粘贴来的,根本不需要看寄存器,随便选择参数就配置好了,从这个角度看,STM32的库函数是不是比寄存器方便多了,这就是库函数的优势。
(4)EXTI_GenerateSWInterrupt,这个函数是用来软件触发外部中断的,调用此函数,参数给一个指定的中断线,就能软件触发一次这个外部中断,若程序中需要这个功能,可以使用这个函数,若只需要外部引脚触发中断,则不需要这个函数。
(5)剩下四个函数也是库函数的模板函数,很多模块也都有。因为再外设运行的过程中,会产生一些状态标志位,比如外部中断来了,是不是会有一个挂起寄存器置了一个标志位,对于其他外设,比如串口收到数据会置标志位,定时器时间到也会置标志位,这些标志位都是放在状态寄存器中,当程序想要看到这些标志位时,就可以用到这四个函数。EXTI_GetFlagStatus可以获取指定的标志位是否被置1**;EXTI_ClearFlag可以对置1的标志位进行清除;对于这些标志位,有的比较紧急,在置标志位后会触发中断,在中断函数里,如果想查看标志位和清除标志位,那么就用下面两个函数EXTI_GetITStatus**获取中断标志位是否被置1、EXTI_ClearITPendingBit清除中断挂起标志位。
总结,如果想在主程序里查看和清除标志位,就用上两个函数,如果想在中断函数里查看和清除标志位就用下面两个函数。其实本质上,这四个函数都是对状态寄存器的读写,下面两个函数只能读写与中断有关的标志位,并且对中断是否允许做出了判断。而上面的两个函数只是一般的读写标志位,没有额外的处理,能不能触发中断的标志位都能读取,建议在主程序里用上面两个,中断程序里用下面两个。非要在中断里用上面两个,其实也没有问题,只不过库函数针对这两种场景,区分了这两类读写函数。
对于EXTI初始化配置,很明显,用EXTI_Init函数就行了。回到初始化程序里,与配置GPIO类似完成配置,但是注释里有一个地方写错了,需要修改。配置好后,PB14的电平信号就能够通过EXTI通向下一级NVIC了。
2.5 第五步配置NVIC
给中断选择一个合适的优先级,最后通过NVIC,外部中断信号就能进入CPU了。先看库函数文件里的函数,NVIC是内核外设,所以库函数被分配到杂项misc.h里,点开,拖到下面。这里有4个NVIC函数和1个SysTick的一个函数。

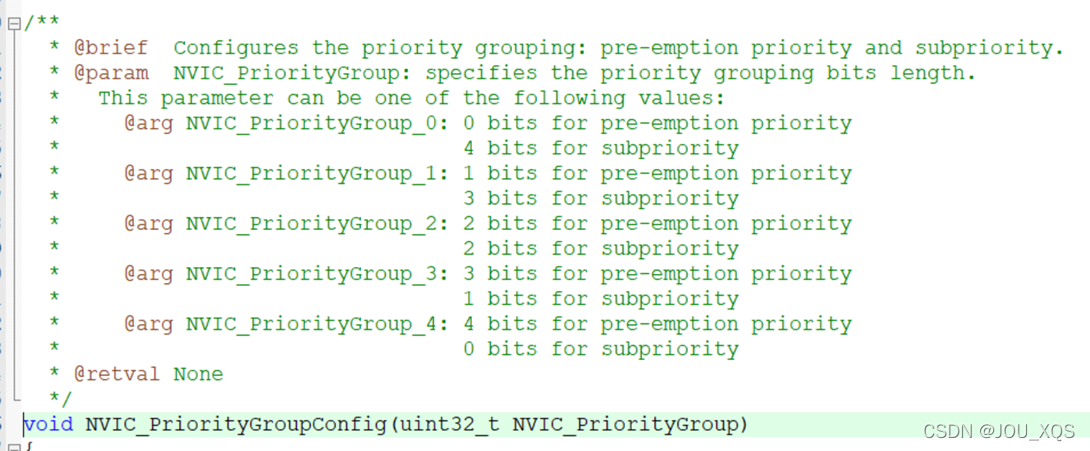
(1)NVIC_PriorityGroupConfig用来中断分组,参数是中断分组的方式。
(2)NVIC_Init根据结构体里指定的参数初始化NVIC。
(3)NVIC_SetVectorTable,设置中断向量表,用的比较少
(4)NVIC_SystemLPConfig,系统低功耗配置,用的比较少
NVIC库函数只需要用上两个,在配置中断之前,先指定一下中断的分组没然后使用NVIC_Init初始化NVIC就行了。
赋值NVIC_PriorityGroupConfig到.c文件里配置中断分组,点函数然后F12转到定义,根据实际需求选择几位抢占,几位响应,一般的话中断不多,很难导致中断冲突,对于优先级分组来说,就比较随意了,哪个都行,这里选择2位抢占,2位响应,比较平均。
注意:这个分组方式,整个芯片只能用一种,所以这个分组的代码整个工程只需要执行一次就行了,如果放在模块里进行分组,需要确保每个模块分组都选的是同一个。也可以把代码放到主函数的最开始,这样模块里就不用再进行分组了。
回到初始化程序里,与配置GPIO类似完成配置。
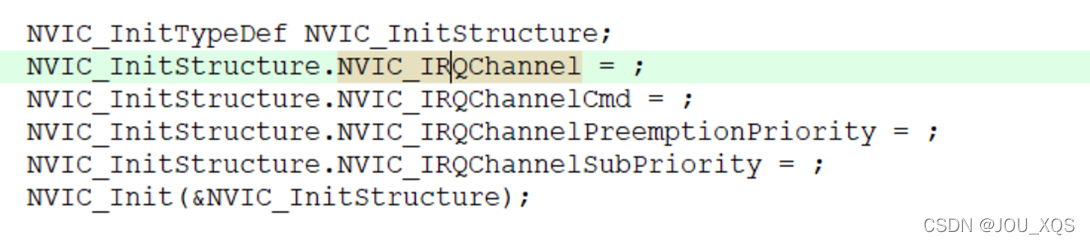 NVIC_IRQChannel查找定义,找到注释,选中再次F12
NVIC_IRQChannel查找定义,找到注释,选中再次F12

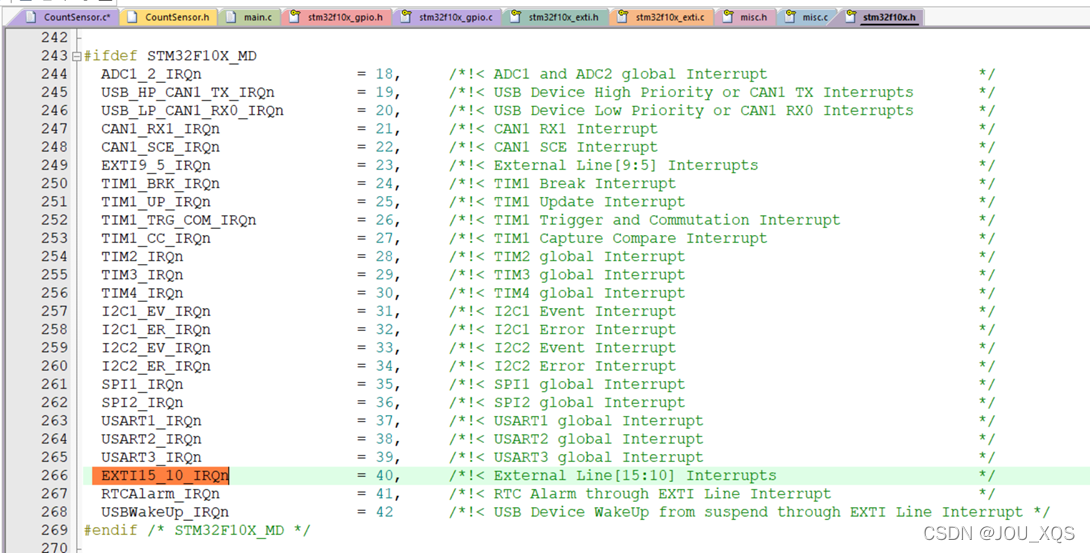
进入stm32f10x.h文件,因为这个库函数可以兼容所有的F1系列芯片,但是不同的芯片中断通道列表是不一样的,所以要根据所用芯片选择中断通道列表,找到MD,找到EXTI15_10_IRQn,放到配置里,这样就完成通道指定。
最后完成配置。
3.中断程序的编写
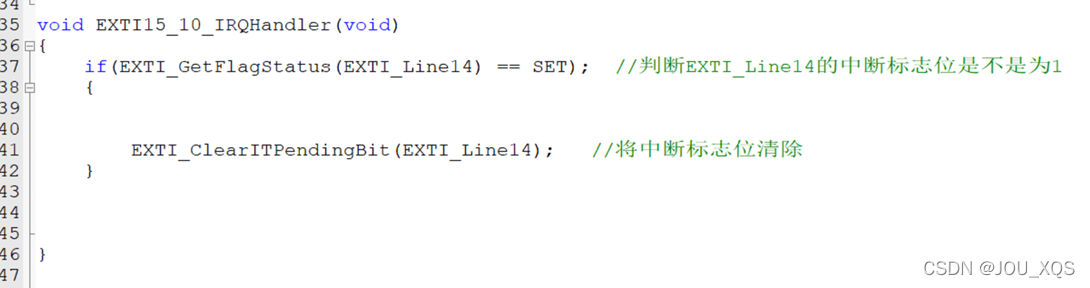
在STM32中,中断函数的名字都是固定的,每个中断通道都对应一个中断函数,中断函数的名字参考启动文件md.s,以IRQHandler结尾的字符串就是中断函数的名字,找到EXTI15_10_IRQHandler复制。
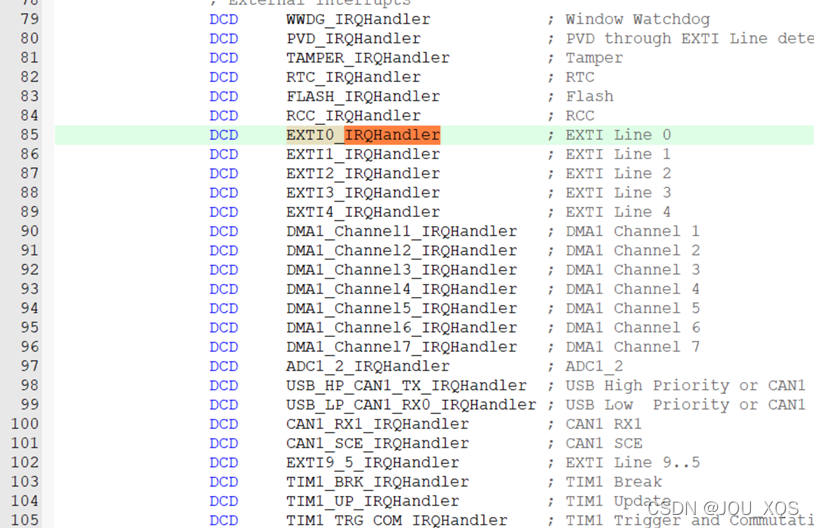
回到.c程序粘贴如下图所示,中断函数都是无参无返回值的,记住名称不能写错,写错就进不去中断了,最好就是从启动文件复制粘贴到这里。
在中断函数里,一般先进行一个中断标志位的判断,确保是我们想要的中断源触发的这个函数。因为这个函数EXTI10到EXTI15都可以进来,所以要先判断是不是我们想要的EXTI14进来的,这时需要到exti.h文件看一下,复制此函数。
这个函数的返回值是SET和RESET,最后结束时一定要再调用一下清除中断标志位的函数,因为只要中断标志置1,程序就会跳转到中断函数,如果不清除中断标志位,那它就会一直申请中断,这样程序就会不断响应中断,执行中断函数,程序就卡死在中断函数里了。
中断函数无需声明,自动调用。
最终函数。
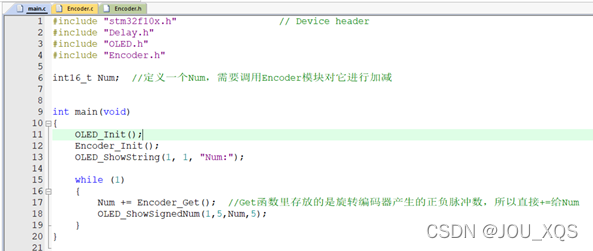
三、旋转编码器计次
1 接线图
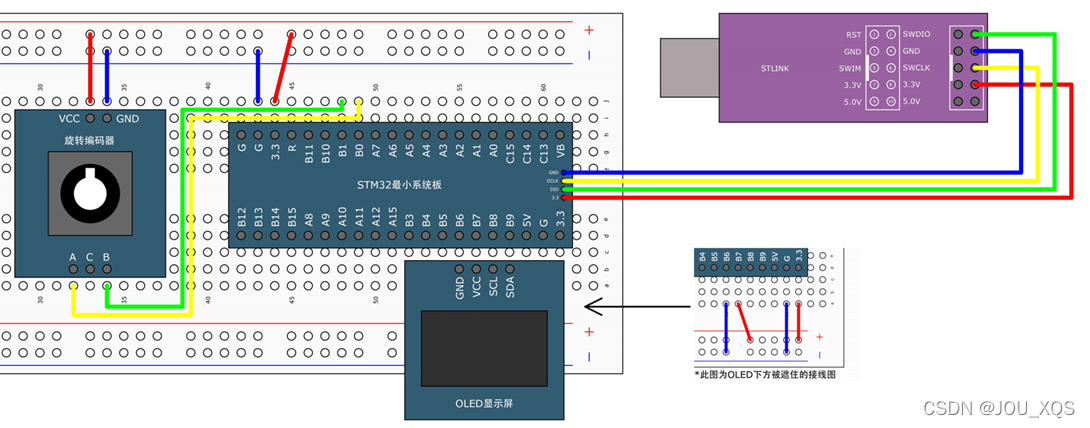
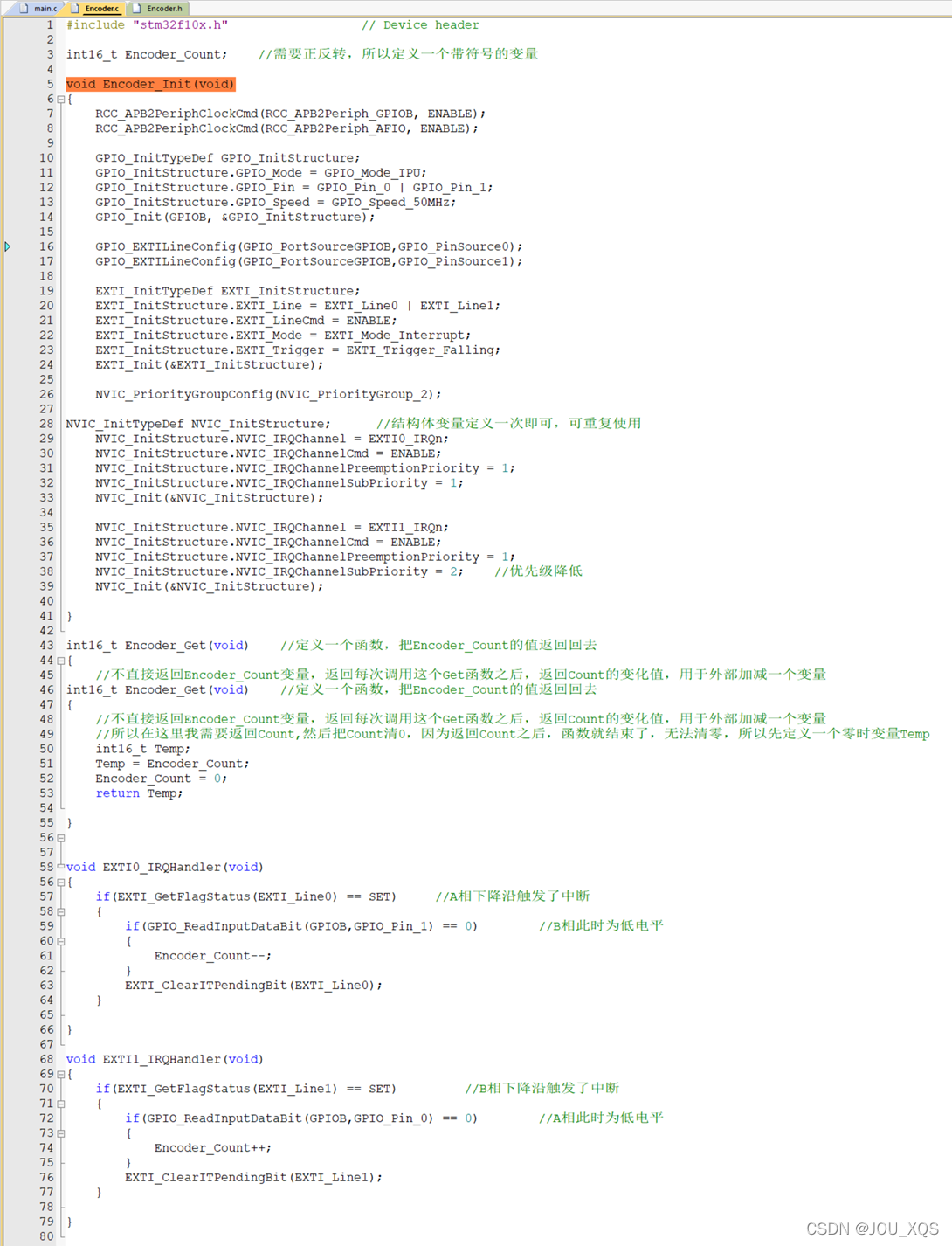
封装旋转编码器函数。如果把一相的下降沿作触发中断,在中断时候读取另一相的电平,正转(右转)就是高电平,反转(左转)就是低电平,这样就可以区分正反转了。但是在操作时有一些问题,正转的时候,由于A相先出现下降沿,所以刚开始转动时,就进中断了,而反转是A相后出现下降沿,所以是转到位了,才进入中断,实际上也没有问题。我们这里准备的是AB相都触发中断,只有在B相下降沿和A相低电平时,才判断为正转,在A相下降沿和B相低电平时,才判断为反转,这样就能保证正传、反转都是转到位了,才执行数字加减的操作。
2 程序编写
展示两个中断的初始化代码。
总结
中断编程的建议:
(1)中断函数里,不要执行耗时过长的代码,中断函数要简短快速,别刚进中断就执行一个Delay多少毫秒这样的代码。因为中断时处理突发的事情,如果为了处理一个突发的事情,呆在中断不出来,那主程序就会严重堵塞。
(2)最好不要在中断函数和主函数调用相同的函数或操作同一硬件,尤其时硬件相关的函数。比如OLED显示函数,如果既在主程序调用OLED,又在中断里调用OLED,OLED就会显示错误,
因为在主程序里,OLED刚显示一半,进中断了,结果中断里还是OLED显示函数,那OLED就挪到其他地方显示了,这时还没有问题,但中断结束后,需要继续原来的显示,就会出现问题,因为硬件的显示位置被挪到其他地方了,所以再回来时,继续显示的内容就会跟着跑到其他地方去。虽然在中断进入和退出的时候,会保护现场和恢复现场,但这只能保证CPU程序能正常返回不出问题,对于外部硬件的话,没有在进入中断时,进行现场保护,所以中断返回后,就出问题了,为了避免这样的问题,最好不要在主程序和中断程序里,操作可能产生冲突的硬件。最好在中断里操作变量和标志位,当中断返回时,再对这个变量进行显示和操作,这样既能保证中断函数的简短快速,又能保证不产生冲突的硬件操作。
(3)其他地方也可以多用变量和标志位,减少代码之间的耦合性,让各部分代码相互独立,仅使用变量、标志位或者函数作为接口,这样让程序更加清晰,代码更加强健。



















 1231
1231

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











