







IMU:加速度计和陀螺仪的原理介绍
IMU(惯性测量单元)中的加速度计和陀螺仪是核心组件,分别测量物体的线性加速度和角速度。
加速度计的原理
-
什么是加速度计
- 加速度计是一种测量物体在各方向(x, y, z)的线性加速度的传感器。
- 线性加速度包括两部分
- 重力加速度(g):由于地球引力作用的加速度。
- 惯性加速度:物体由于运动状态变化产生的加速度。
- 加速度计可以感知静止状态下的重力方向,也可以感知运动过程中加速度的变化。
-
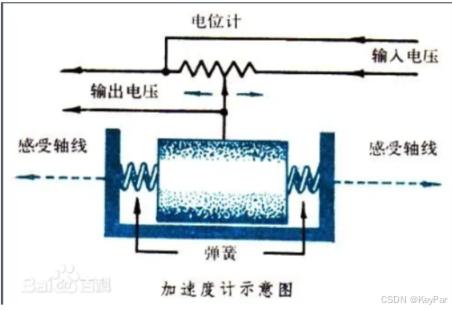
加速度计图
-
加速度计的工作原理
- 电容式加速度计:最常见的是电容式加速度计,它的核心是一种微机电系统(MEMS)结构。工作机制如下:
- 加速度计内部有一个悬挂的质量块(Proof Mass),用弹性材料悬挂在传感器框架中。
- 当外界施加加速度时,这个质量块会相对框架发生位移。
- 质量块的位移会导致与其连接的电容器间距发生变化,进而改变电容值。
- 通过检测电容值的变化,可以计算出施加的加速度。
- 压电式加速度计:另一个常见的类型是压电式加速度计,主要用于高精度测量场景。工作机制如下:
- 利用压电材料的特性,当加速度作用在压电材料上时,材料会产生电荷。
- 通过测量电荷信号的强弱,可以推导出外界加速度的大小。
- 电容式加速度计:最常见的是电容式加速度计,它的核心是一种微机电系统(MEMS)结构。工作机制如下:
-
加速度计的优缺点
- 优点
- 体积小,功耗低,适合嵌入到移动设备中。
- 能够感知重力方向,用于姿态估计。
- 缺点
- 对高频振动敏感,可能产生噪声。
- 长时间积分会积累误差,无法精确计算物体位移。
- 优点
-
加速度计的应用
- 姿态估计:通过检测重力加速度,计算物体的俯仰角和滚转角。
- 运动检测:如计步器、车辆加速度感知。
- 导航:作为惯性导航系统的一部分,提供运动加速度信息。
陀螺仪的原理
-
介绍陀螺仪之前先介绍几个基础知识
- 科里奥利力(Coriolis force)有些地方也称作哥里奥利力,简称为科氏力,是对旋转体系中进行直线运动的质点由于惯性相对于旋转体系产生的直线运动的偏移的一种描述。科里奥利力来自于物体运动所具有的惯性。
- Sagnac效应( Sagnac Effect)是1913年萨格纳克发明的一种可以旋转的环形干涉仪。将同一光源发出的一束光分解为两束,让它们在同一个环路内沿相反方向循行一周后会合,然后在屏幕上产生干涉,当在环路平面内有旋转角速度时,屏幕上的干涉条纹将会发生移动,这就是萨格纳克效应。萨格纳克效应中条纹移动数与干涉仪的角速度和环路所围面积之积成正比。
- 光学谐振腔(optical resonant cavity)光波在其中来回反射从而提供光能反馈的空腔。激光器的必要组成部分,通常由两块与激活介质轴线垂直的平面或凹球面反射镜构成。光学谐振腔有两个作用,一个是提供正反馈,一个是控制腔内振荡光束的特征。
-
什么是陀螺仪
- 陀螺仪是一种测量物体角速度(绕各个轴的旋转速度)的传感器。通过对角速度进行积分,可以计算出物体的旋转角度。
-
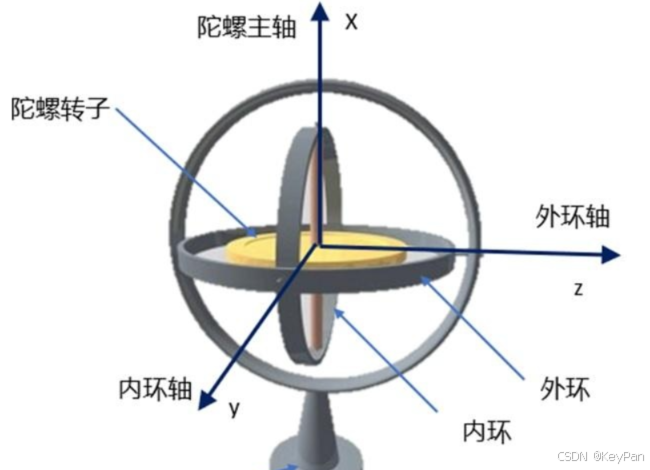
陀螺仪图
-
陀螺仪的工作原理
- 基于微机电系统(MEMS)的陀螺仪:MEMS陀螺仪是现代电子设备中最常用的类型,其工作原理基于科里奥利力(Coriolis force)。具体机制如下:
- MEMS陀螺仪中有一个振动质量块,它在某一方向上以固定频率振动。
- 当陀螺仪发生旋转时,质量块会受到科里奥利力的作用,导致振动方向发生偏移。
- 科里奥利力的大小与角速度成正比。
- 通过检测振动的偏移量,可以计算出旋转角速度。
- 光纤陀螺仪(FOG):用于高精度测量场景(如航空航天领域)。其工作原理基于Sagnac效应。具体机制如下:
- 在一个光纤环中,光沿顺时针和逆时针方向传播。
- 当光纤环发生旋转时,顺时针和逆时针光波会出现相位差。
- 通过测量相位差,可以计算旋转角速度。
- 激光陀螺仪:激光陀螺仪的原理与光纤陀螺仪类似,但使用的是激光谐振腔。其精度极高,但成本昂贵,常用于航空和军工领域。
- 基于微机电系统(MEMS)的陀螺仪:MEMS陀螺仪是现代电子设备中最常用的类型,其工作原理基于科里奥利力(Coriolis force)。具体机制如下:
-
陀螺仪的优缺点
- 优点
- 短时间内精度高,可测量高速旋转运动。
- 对振动不敏感,稳定性较好。
- 缺点
- 存在漂移现象,长时间使用会积累误差。
- MEMS陀螺仪的精度不如光纤或激光陀螺仪。
- 优点
-
陀螺仪的应用
- 姿态估计:结合加速度计,提供物体的完整姿态(俯仰角、滚转角、偏航角)。
- 惯性导航:计算航向变化。
- 运动跟踪:如 VR/AR 设备的头部跟踪、无人机的稳定控制。
加速度计与陀螺仪的结合
单独使用加速度计或陀螺仪,都会有局限性:
-
加速度计:受噪声影响,无法单独测量旋转运动。
-
陀螺仪:存在漂移问题,长时间测量误差累积。
因此,在 IMU 中,通常将加速度计与陀螺仪结合使用,通过数据融合算法(如卡尔曼滤波或互补滤波)来弥补各自的不足。
加速度计和陀螺仪的结合应用示例
-
姿态估计
- 加速度计:提供俯仰角(Pitch)和滚转角(Roll)参考,但无法单独获得偏航角(Yaw)。
- 陀螺仪:提供短时间内的精确旋转信息,可计算偏航角,但有漂移。通过结合两者的数据,可以估算物体的完整三维姿态。
-
惯性导航(INS)
- 加速度计:提供线性加速度,用于估算位移。
- 陀螺仪:提供旋转信息,用于计算运动方向。
通过对加速度和角速度数据的融合,可以实现对物体运动轨迹的推算。
关键问题与发展趋势
- 漂移问题:陀螺仪漂移和加速度计噪声会导致长时间测量不准确,解决方法:
- 传感器融合:将 IMU 与其他传感器(如 GPS、磁力计、LiDAR、相机)结合。
- 滤波算法:利用卡尔曼滤波等算法,减小误差。
- 微机电系统(MEMS)的发展
- MEMS技术的不断进步,使得加速度计和陀螺仪的体积更小、功耗更低。
- 提升了精度,扩大了应用范围。
总结
加速度计和陀螺仪是 IMU 的核心组件
- 加速度计:感知线性加速度和重力。
- 陀螺仪:感知角速度和旋转。
两者结合,通过滤波和数据融合算法,可以实现三维运动跟踪、姿态估计和导航,广泛应用于机器人、无人机、自动驾驶、消费电子等领域。

















 7203
7203

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









