







 本文介绍了如何使用STM32HAL库配合STM32F103RCT6芯片操作旋转编码器,通过两种方法实现正反转检测:一是定时器中断方式,二是定时器方式。在CubeMX中配置时钟、引脚和中断,然后在主函数和中断服务函数中编写相应代码,实现编码器的输入捕获和计数功能,以此判断旋转方向。
本文介绍了如何使用STM32HAL库配合STM32F103RCT6芯片操作旋转编码器,通过两种方法实现正反转检测:一是定时器中断方式,二是定时器方式。在CubeMX中配置时钟、引脚和中断,然后在主函数和中断服务函数中编写相应代码,实现编码器的输入捕获和计数功能,以此判断旋转方向。
STM32 HAL库自学记录-旋转编码器的使用
前言
通过本文可学会两种实现判断旋转编码器正转反转的方法,可根据自己的应用场景来选择使用哪种方法。
使用工具
1、芯片:STM32F103RCT6
2、STM32CubeMx软件
3、IDE: MDK-Keil软件
4、旋转编码器模块
5、XCOM V1.4串口软件
旋转编码器原理介绍
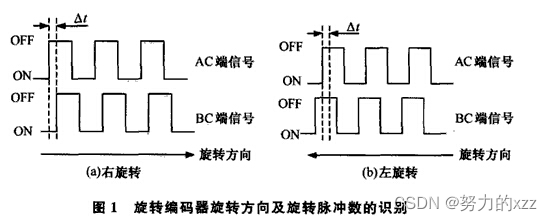
图中C端为GND。
方向:A相和B相相差一个相位,一般来说是90°。A相信号在前表示正转,B相信号在前表示反转。
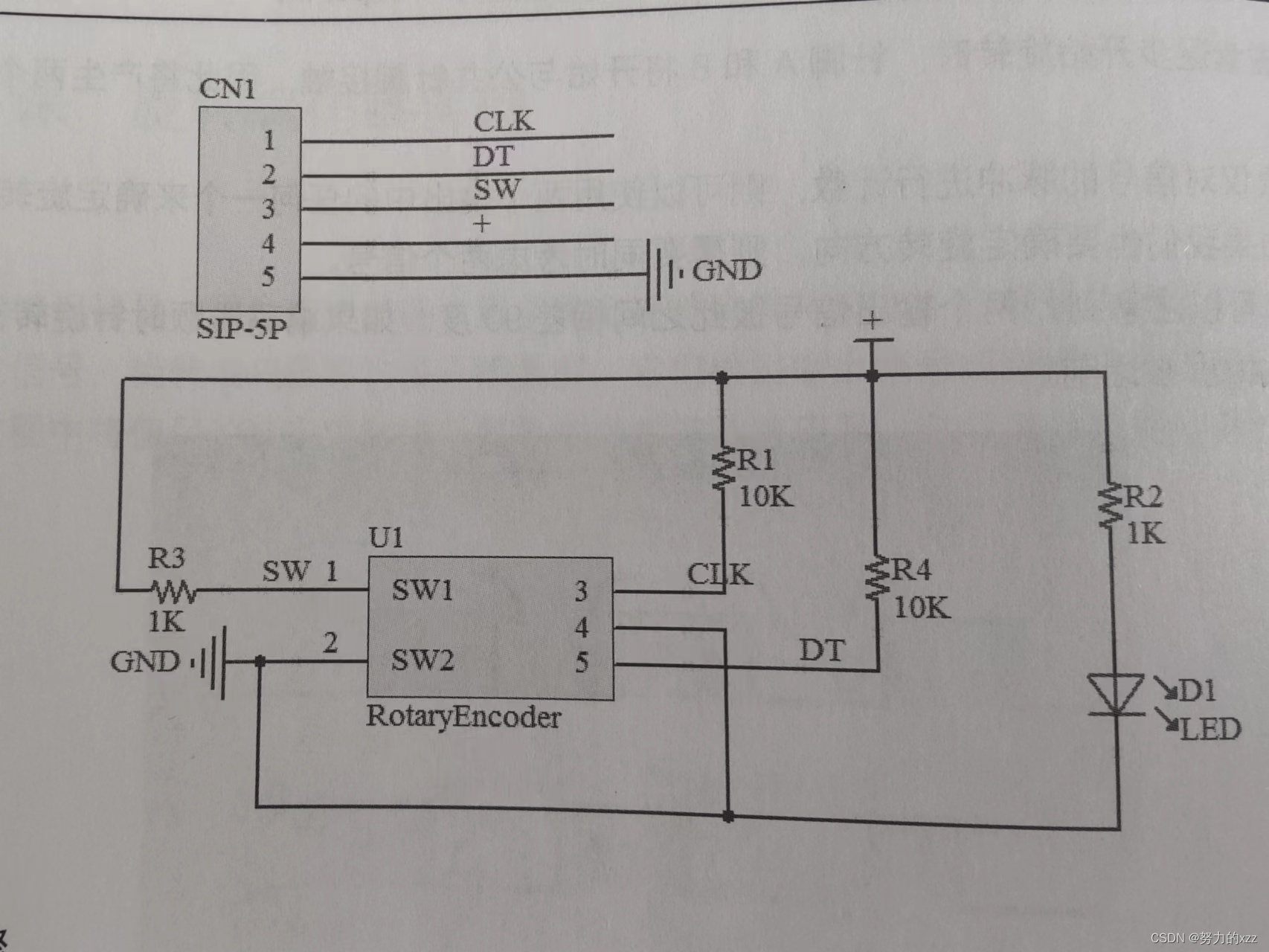
上图是模块的原理图,实物图如下:

方法一 定时器中断方式(实质就是外部中断)
cubeMX配置:
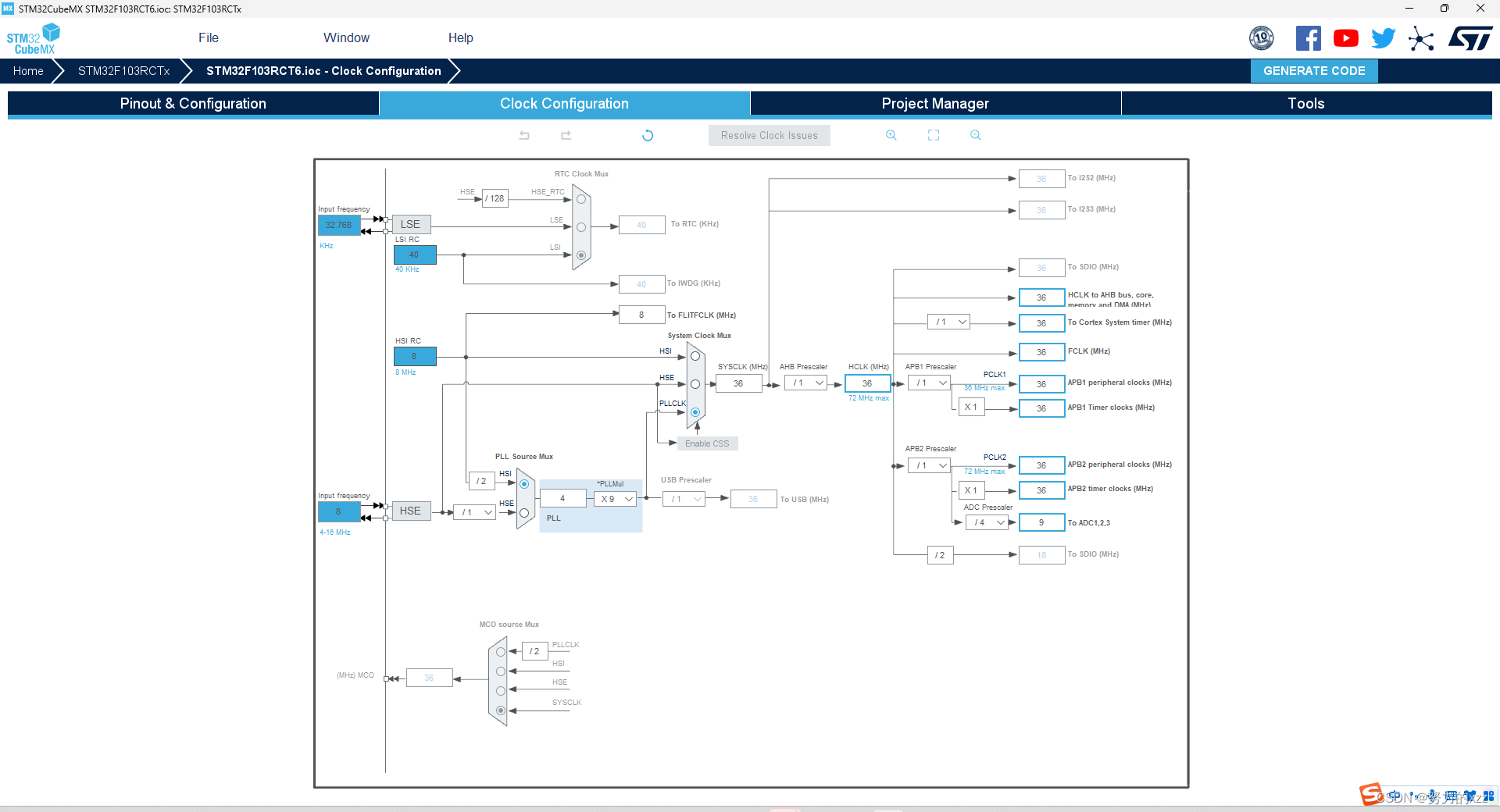
首先是时钟配置,我这边是有外部时钟的,所以选择了使用外部时钟,具体配置如下图:
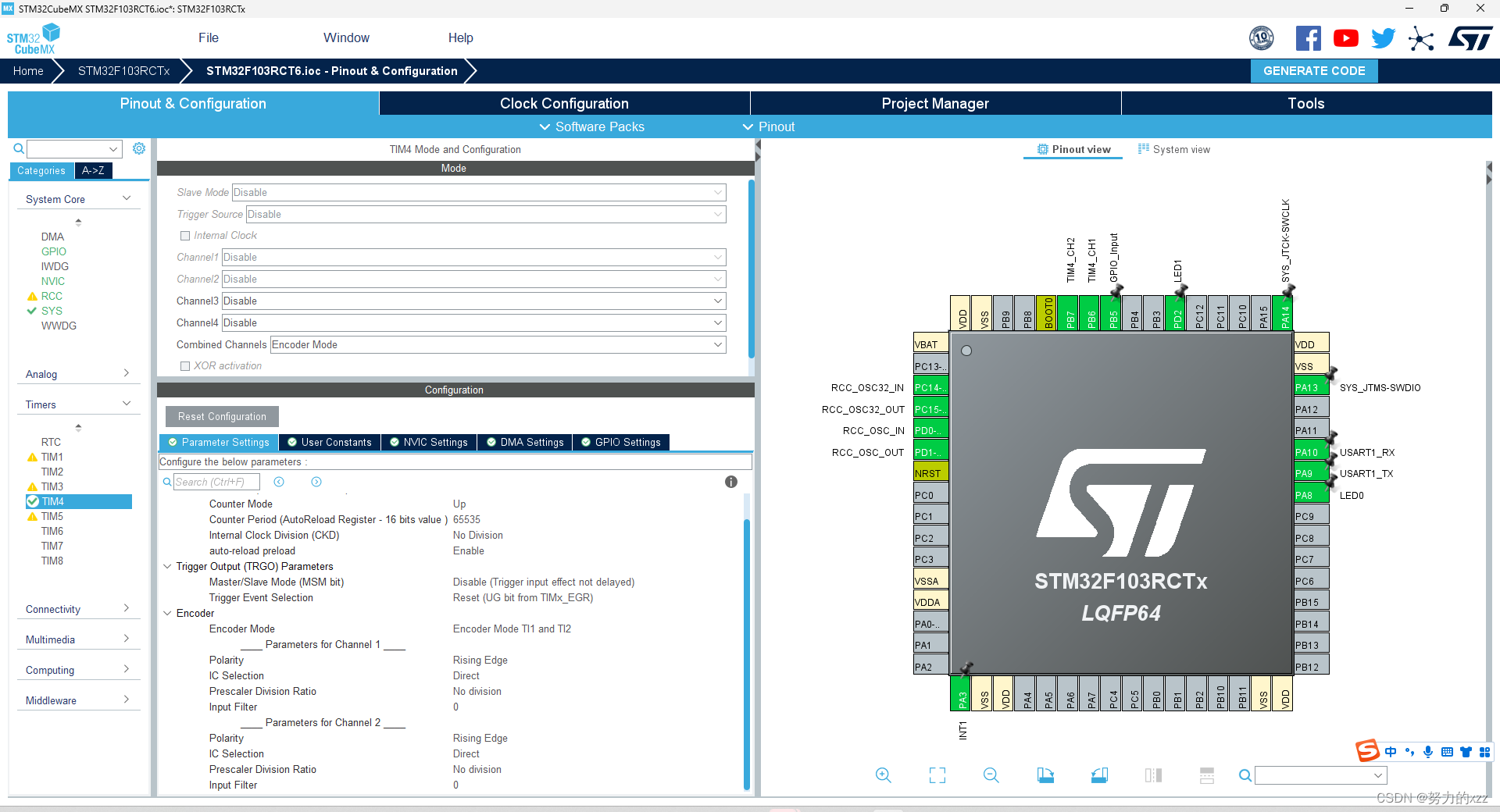
 接下来选择自己要使用的引脚,外部中断和定时器输入捕获中断在这个实验中都是一个效果,偷懒就建一个工程吧。记得TIM4的combined channels要选择encoder mode,他就会默认使用了TIM4的channel1和channel2。记得选择NVIC把TIM4的中断打开。
接下来选择自己要使用的引脚,外部中断和定时器输入捕获中断在这个实验中都是一个效果,偷懒就建一个工程吧。记得TIM4的combined channels要选择encoder mode,他就会默认使用了TIM4的channel1和channel2。记得选择NVIC把TIM4的中断打开。
我这个里面还配置了两个LED灯和一个PB5引脚,PB5引脚是为了连接旋转编码器的按键功能。此外还配置了一个串口,用来打印的。这里就不展开讲解了。
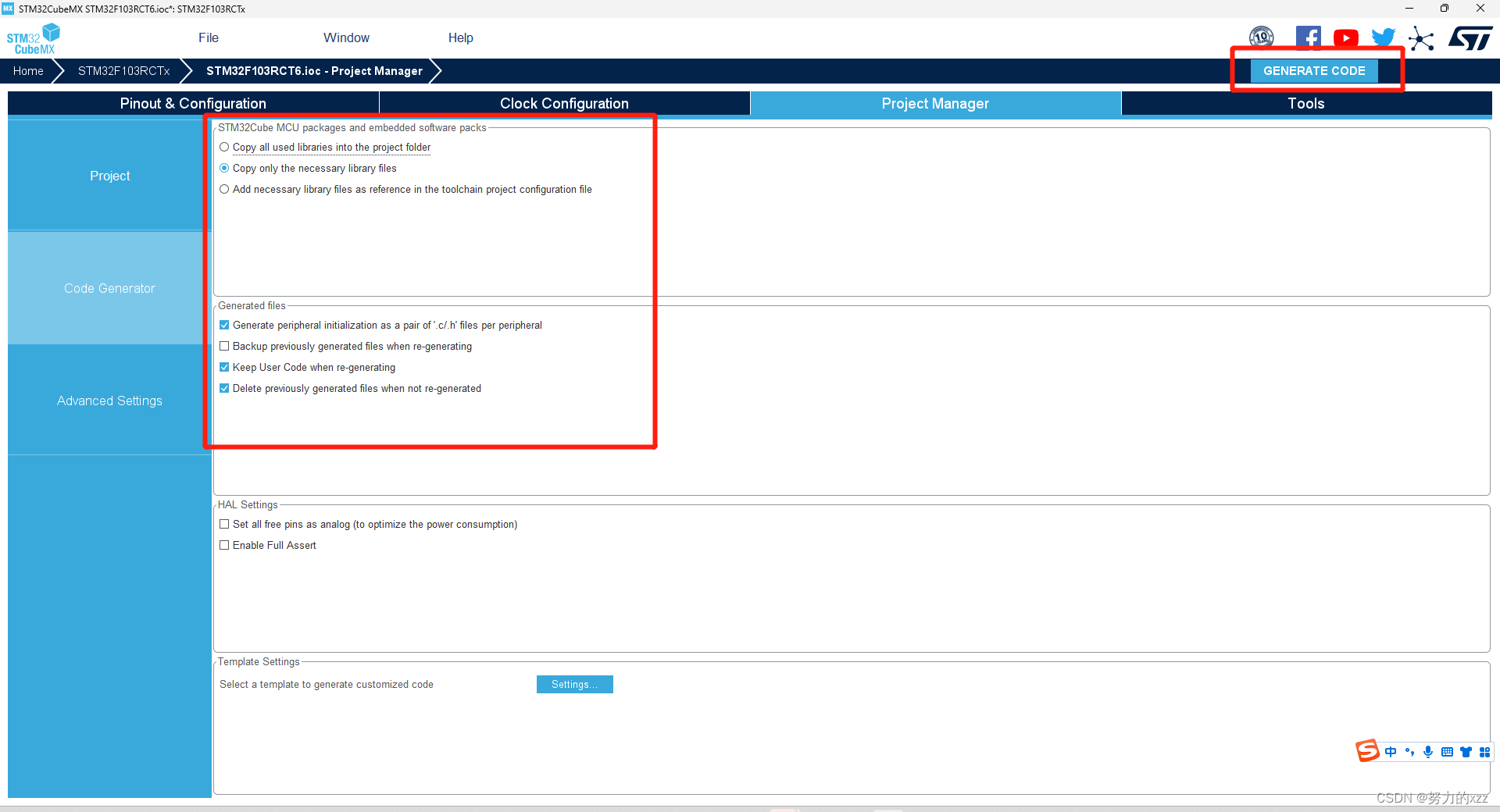
这边看下project manager的配置都没有问题的话就可以点击generate code来生成工程和代码了。
 在主函数中添加:
在主函数中添加:
HAL_TIM_IC_Start_IT(&htim4, TIM_CHANNEL_1);//开启输入捕获且捕获后进入中断
在main.c中添加中断服务函数,我这边添加的定时器中断服务函数,要是使用外部中断就添加外部中断服务函数即可。
void HAL_TIM_IC_CaptureCallback(</ 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2528
2528

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









