#include <iostream>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <boost/thread/thread.hpp>
#include <pcl/filters/passthrough.h>
boost::shared_ptr<pcl::visualization::PCLVisualizer> simpleVis(pcl::PointCloud<pcl::PointXYZ>::ConstPtr cloud) {
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer ("3D viewer"));
viewer->setBackgroundColor(0, 0, 0);
viewer->addPointCloud<pcl::PointXYZ>(cloud, "sample cloud");
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_FONT_SIZE, 3, "sample");
viewer->initCameraParameters();
return (viewer);
}
int main() {
std::string path = "E:\\c++Code\\pcl\\ConsoleApplication1\\data\\filters\\table_scene_lms400.pcd";
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr final(new pcl::PointCloud<pcl::PointXYZ>);
if (pcl::io::loadPCDFile<pcl::PointXYZ>(path, *cloud) == -1) {
PCL_ERROR("Couldn't read file test_pcd.pcd \n");
return (-1);
}
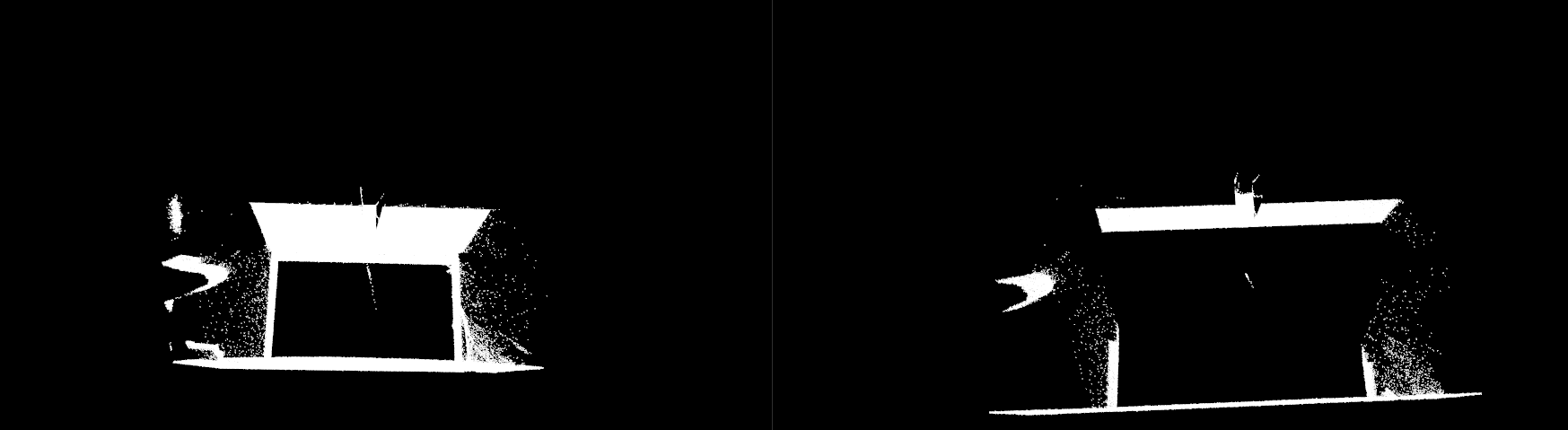
pcl::PassThrough<pcl::PointXYZ> pass;
pass.setInputCloud(cloud);
pass.setFilterFieldName("z");
pass.setFilterLimits(-1.5, -1.3);
pass.filter(*final);
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer1;
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer2;
viewer1 = simpleVis(cloud);
viewer2 = simpleVis(final);
while (!viewer1->wasStopped())
{
viewer1->spinOnce(100);
boost::this_thread::sleep(boost::posix_time::microseconds(100000));
}
while (!viewer2->wasStopped())
{
viewer2->spinOnce(100);
boost::this_thread::sleep(boost::posix_time::microseconds(100000));
}
}






















 724
724

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









