









 本文介绍了一种用于重型卡车的智能控制系统,该系统采用迟滞切换器实现加速与滑行模式间的转换,并通过前车速度预测增强控制稳定性。系统考虑了期望跟车距离、速度差等多种因素,旨在降低油耗。
本文介绍了一种用于重型卡车的智能控制系统,该系统采用迟滞切换器实现加速与滑行模式间的转换,并通过前车速度预测增强控制稳定性。系统考虑了期望跟车距离、速度差等多种因素,旨在降低油耗。
本研究根据期望跟车距离和前后车速度差的关系建立了一个在加速和滑行模式之间切换的迟滞切换器。此外,本课题采用了前车速度预测的方法提高前车速度波动情况下的控制稳定性。
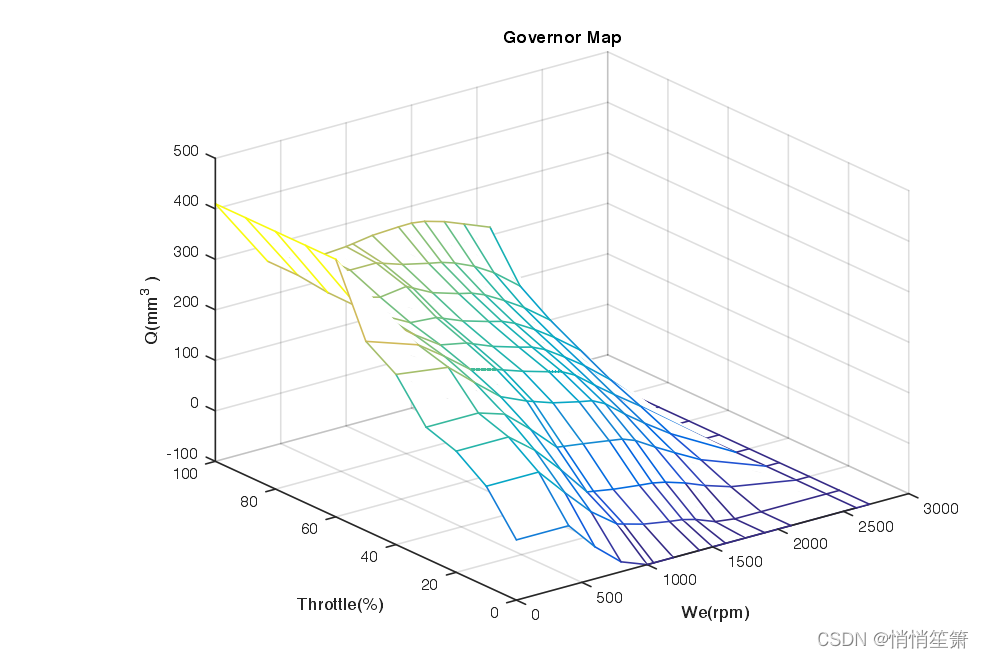
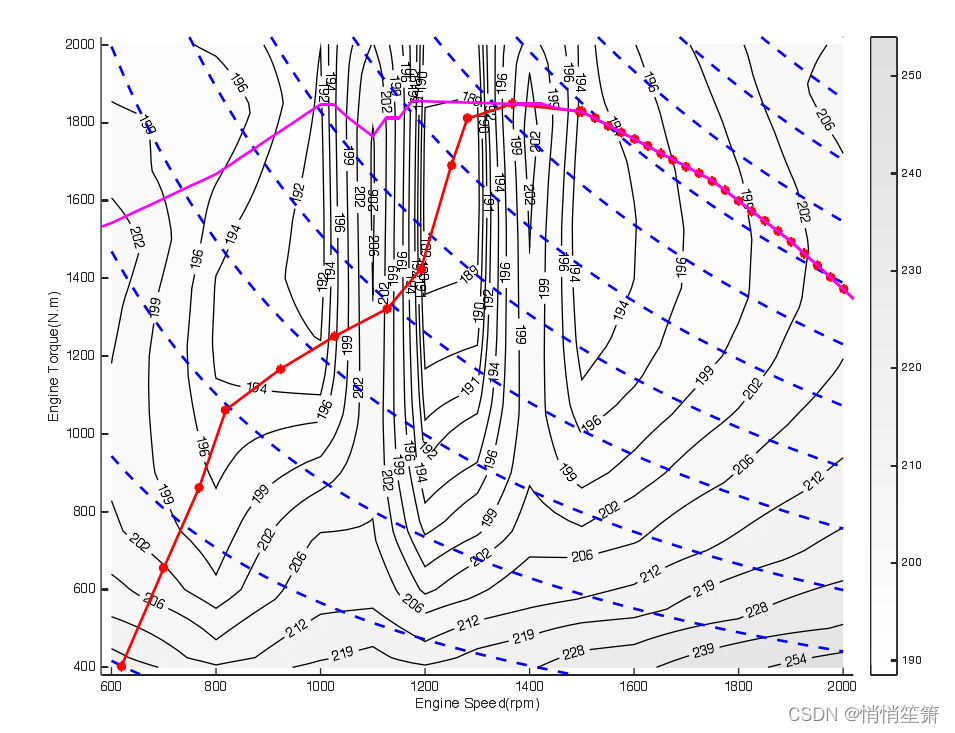
he maximum power is 303 kW, the maximum engine speed is 2175 rpm and the engine can provide a maximum torque of 1850 Nm.
重型卡车的典型技术是在下坡行驶时使用发动机制动来减速
最常用的实施方式是压缩释放发动机制动器

这种类型的制动器非常有效,可以产生接近最大发动机功率的制动功率
In contrast to passenger vehicle engine maps, the brake specific fuel consumption shows three local minimums instead of simply one, which is typical for Heavy-Duty trucks。
与乘用车不同,卡车有三个局部最小燃油消耗率点



前一辆车执行匀速,后一辆车执行加速滑行策略


最大距离和最短距离
使用的是汽车的速度,固定时距

In the Pulse mode, the vehicle accelerates and the engine is operated at fuel economic regions
这个想法是运行在节油区而不是固定车速
总体来讲,加速要费油,滑行要省油,而两者加要比固定车速度省油
开始,在期望车间距
然后,加速到下界

如下图所示:
在当前阶段有五个输入:前车车速、加速度、车间距、速度差、本车车速,红色线是输入输出
输出:
(1)模式
(2)加速模式:优化的挡位、优化的力矩
OPTG算法详细见“3.3.2

The Range Bound Feedback Regulator
虚拟边界:模型不匹配程度。所以依靠车间据的测量
The Torque Optimizer (TO)
Lastly, the switching map defines the point of time at which the operation should be switched from Pulse to Glide mode to not offend the desired range bounds.
切换图可视为二维滞后,使用范围误差和速度误差确定三个命令:
Additionally, the preceding vehicle acceleration is used to predict future preceding vehicle speed and therefore improve the switching logic
另外,前车加速度被用来预测速度,因此提升切换逻辑
(1)设计BSFC line (2)扭矩和挡位优化算法(3)switching map(4)Range Feedback Regulator
3.3.1 3.3.1 BSFC Line Design

第(1):BSFC差别小
(2)
(3) 有两个最小的圈圈


3.3.1.1 Constant Drive Lines






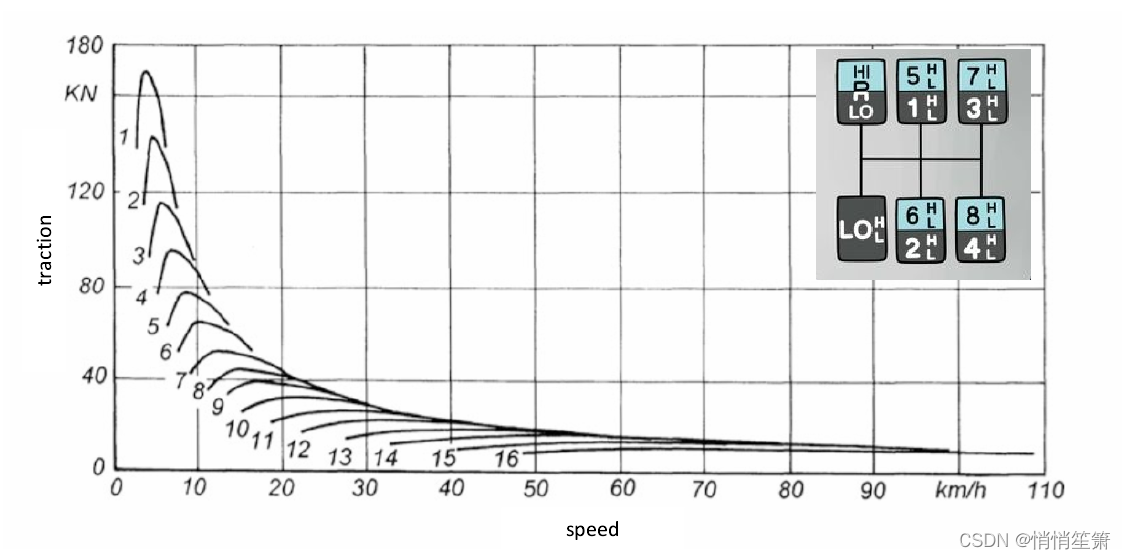
显然,这些等速的橘黄色的线位于低扭矩区间



可以但没必要,卡车60-120km/h

3.3.1.2 ISUZU BSFC Line

起个名字 ISUZU


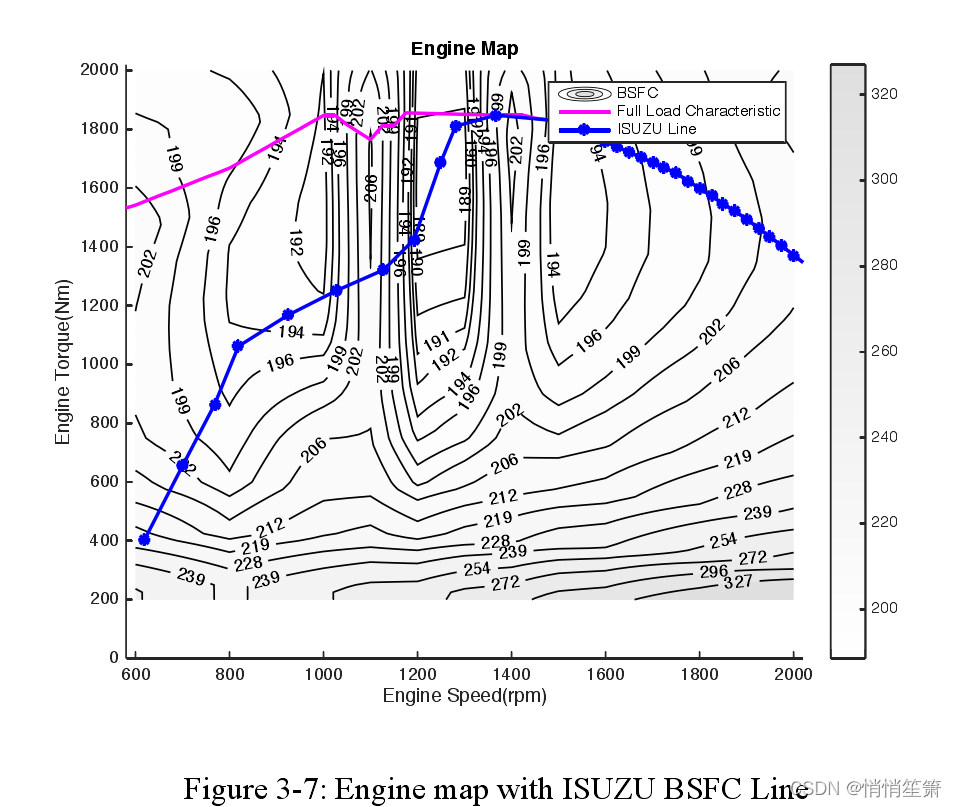 没有运行在最佳燃油点
没有运行在最佳燃油点

3.3.1.3 Optimal BSFC Line




产生了跳跃
问题举例

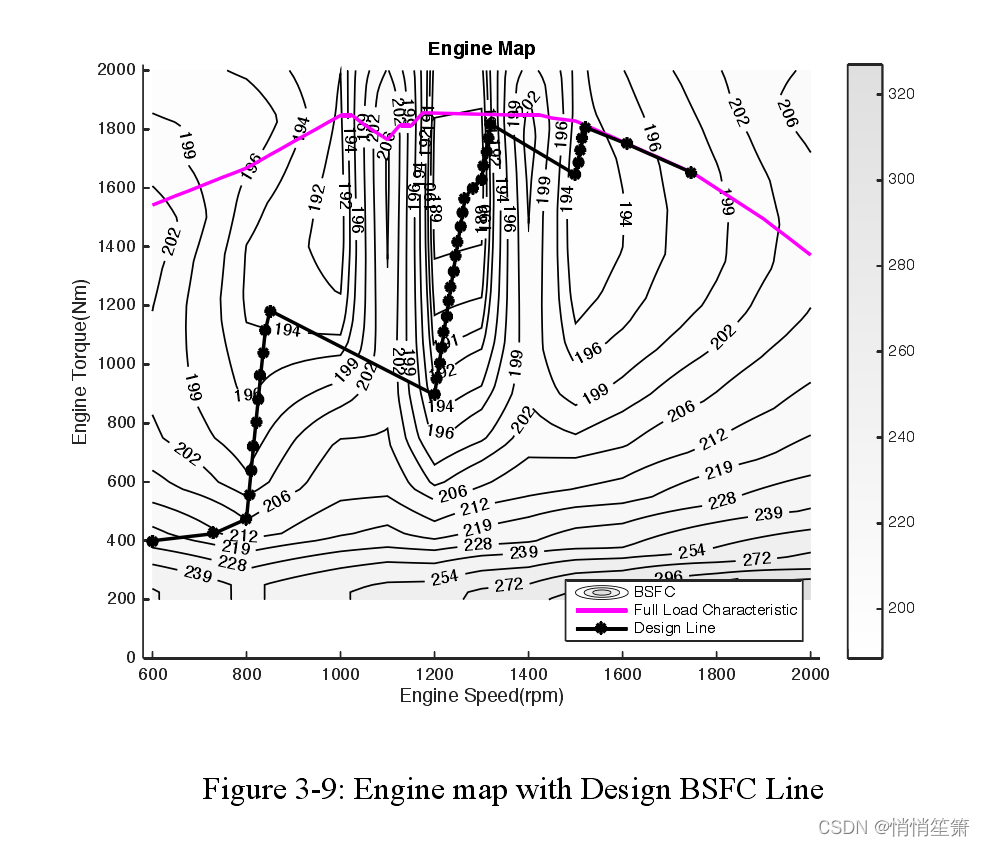
3.3.1.4 Design BSFC Line


3.3.1.5 Comparison of BSFC Lines
3.3.2 OPGT Algorithm Mechanism
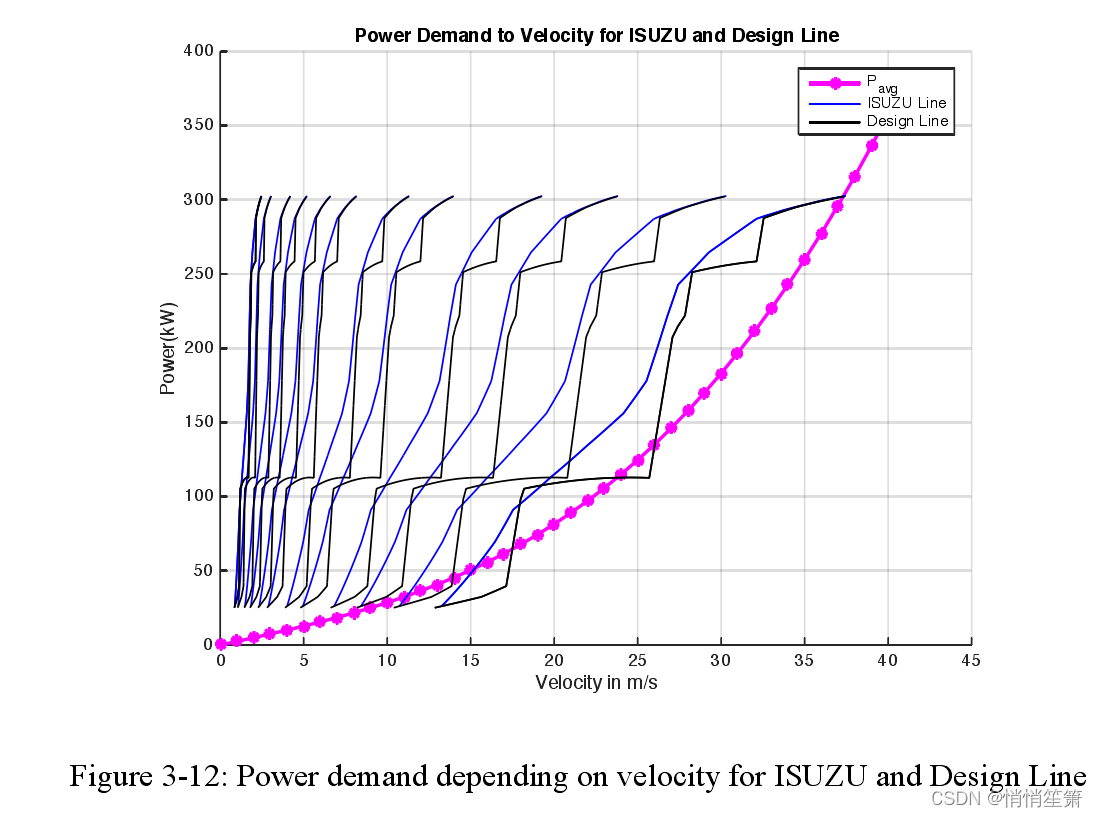
(1)计算平均功率
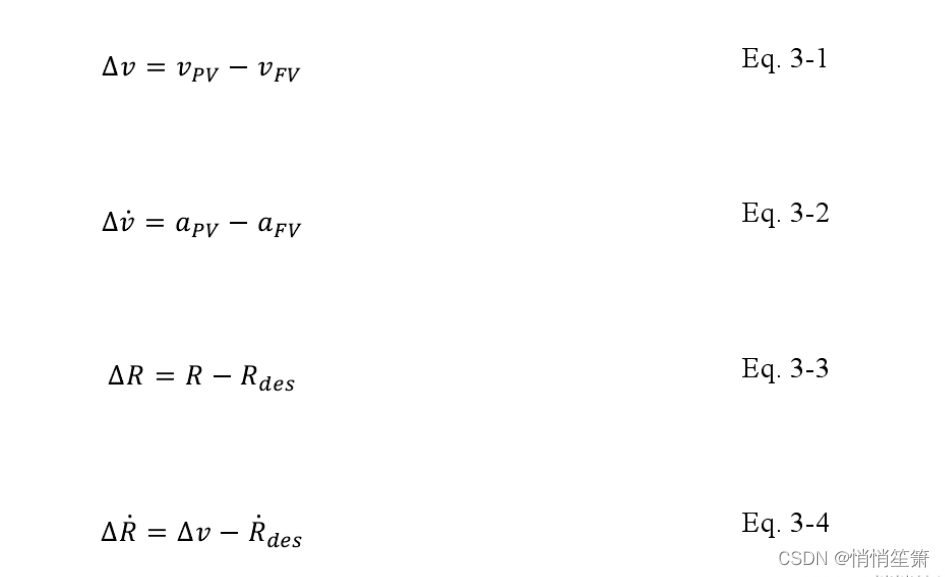
把3.13带入3.14中

加速阶段的功率

3.17是有问题吗
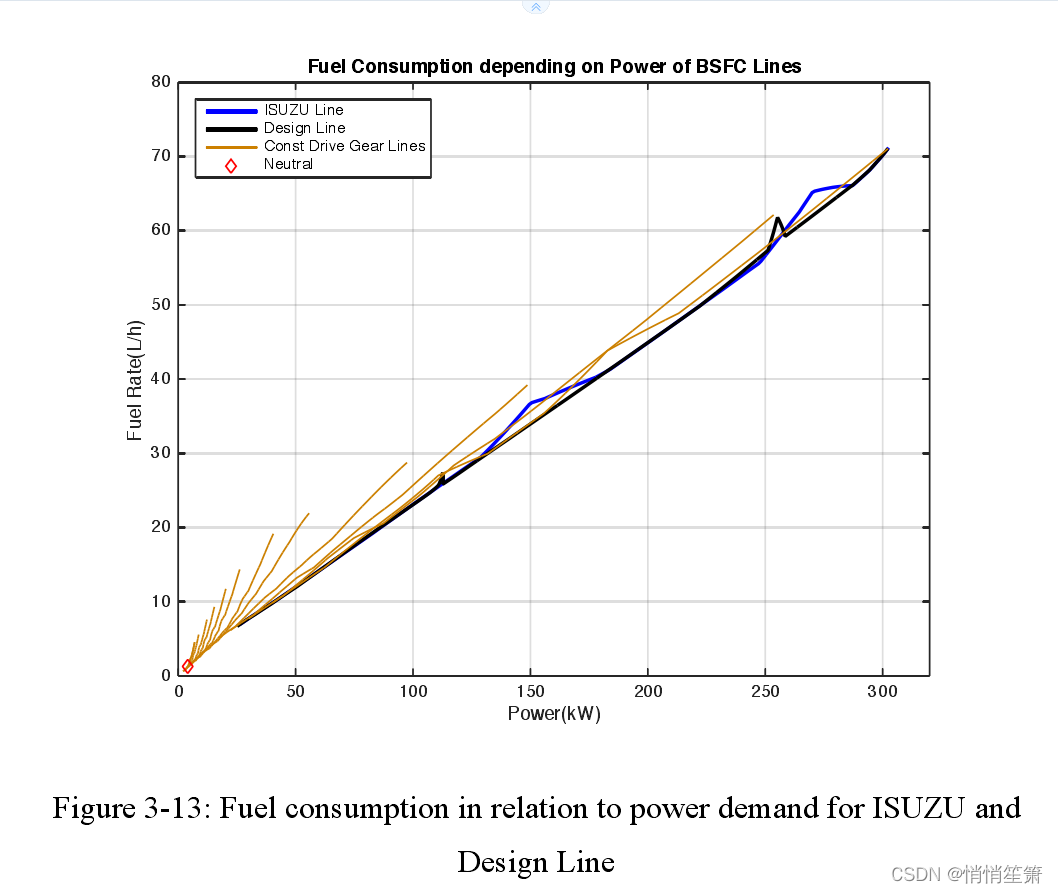
油耗的计算

比油耗图被画出 ,但是固定挡位的油耗是?什么意思
算法的计算过程

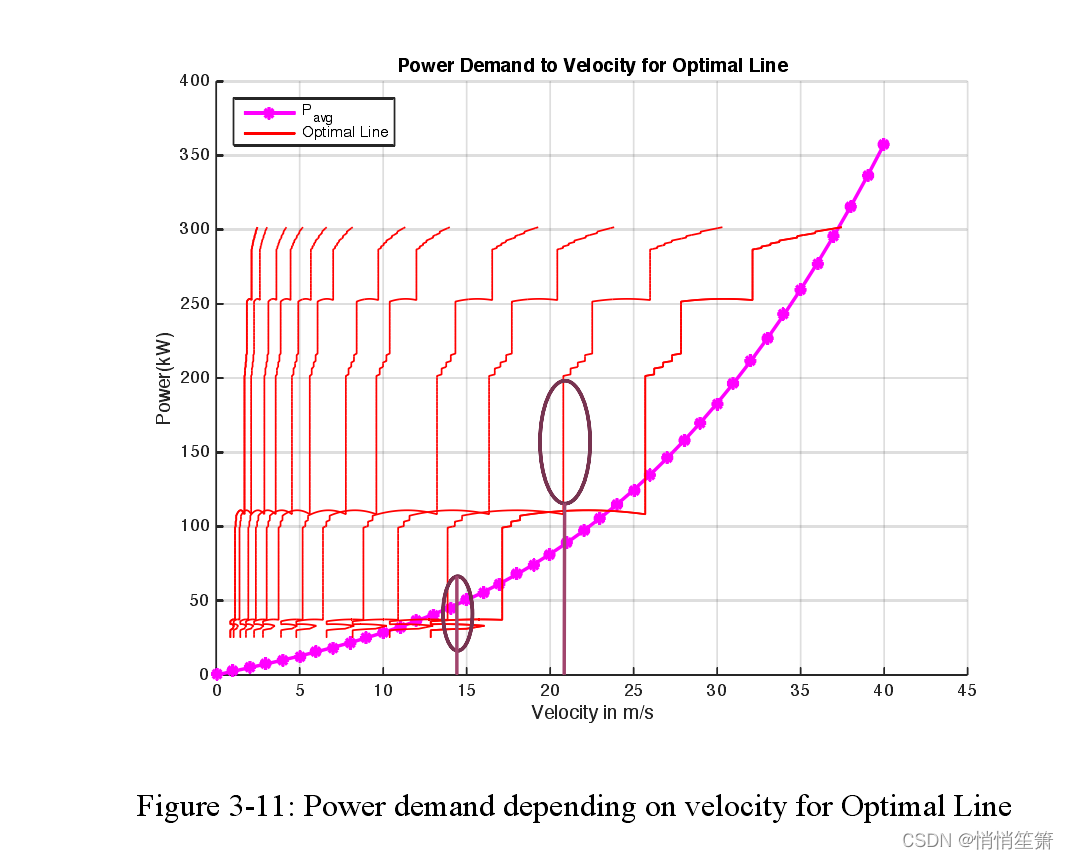
用公式3.12画了3-14
下一步

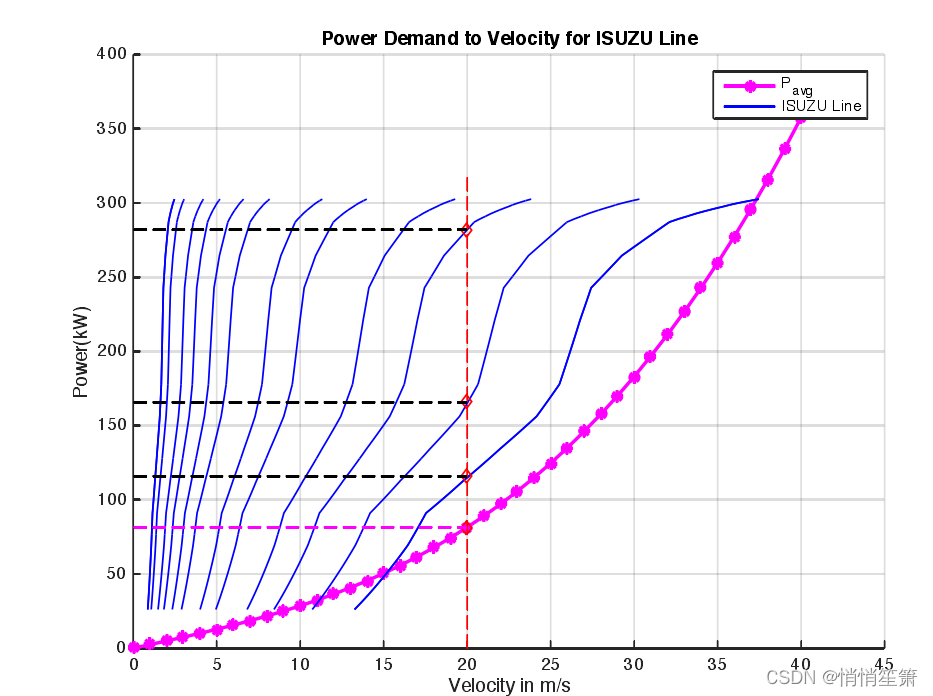
找到了三个点,三个点计算油耗
如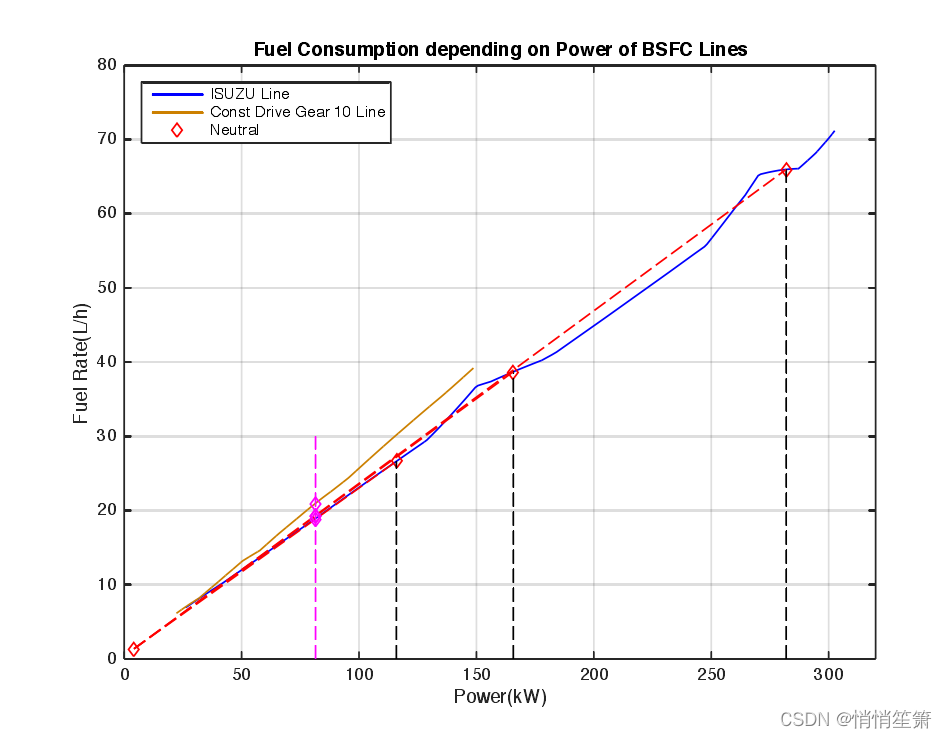
这个图,标注了油耗
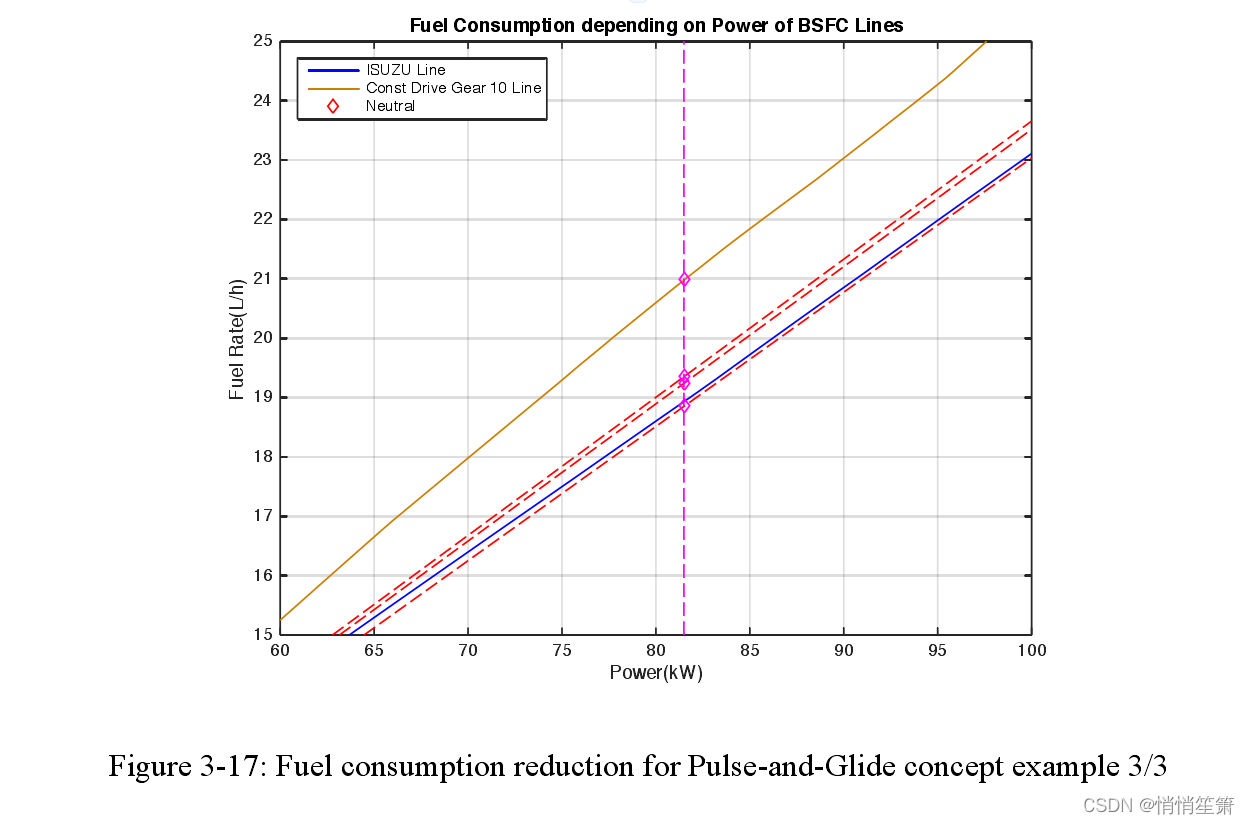
对3.16和3.17的描述,如上图
Therefore, the fuel consumption at average engine power (magenta colored line) is interpolated for each previously determined candidate of gear, pulse power and resulting engine torque combination by using linear interpolation.


算法的结果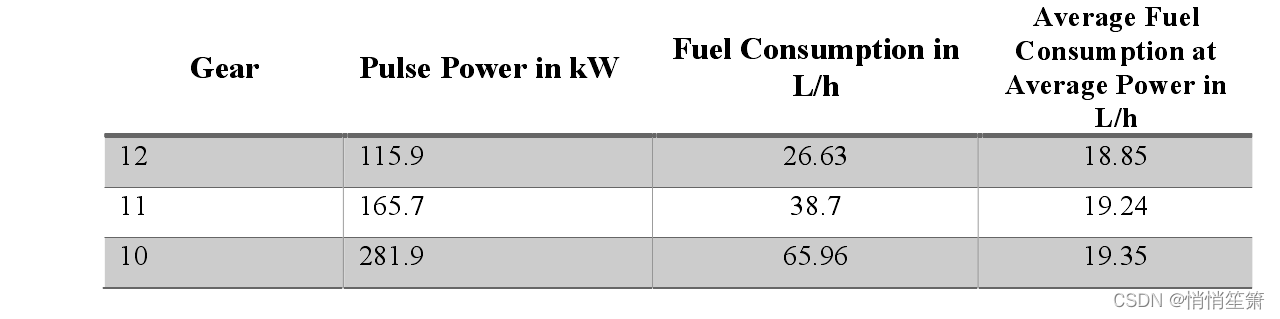

节油效果
上述流程并没有梳理清楚
3.3.3 Switching Hysteresis Design




两种情形:匀速,自然交通流
To sum this up, the switching map design is depending on range error and velocity error, as well as preceding vehicle speed and acceleration.


3.3.3.1 PV speed constant


考虑上界,积分

为了使得Delta R和Delta V产生联系,重写公式3.23
这里的虚线是??
3.3.3.2 PV speed variation



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









