









 本文详细介绍了LuGre摩擦模型,对比了它与Dahl模型的区别,强调了速度相关函数g(v)和粘滞摩擦力项f(v)在模型中的作用。 LuGre模型考虑了速度和微位移对摩擦力的影响,其中f(v)与宏观位移成正比,g(v)描述了库伦摩擦和Stribeck效应。在恒速情况下,稳态摩擦力Fss(v)由g(v)和f(v)共同决定。此外,文章还探讨了Stribeck速度和指数α如何影响摩擦力的衰减曲线。
本文详细介绍了LuGre摩擦模型,对比了它与Dahl模型的区别,强调了速度相关函数g(v)和粘滞摩擦力项f(v)在模型中的作用。 LuGre模型考虑了速度和微位移对摩擦力的影响,其中f(v)与宏观位移成正比,g(v)描述了库伦摩擦和Stribeck效应。在恒速情况下,稳态摩擦力Fss(v)由g(v)和f(v)共同决定。此外,文章还探讨了Stribeck速度和指数α如何影响摩擦力的衰减曲线。
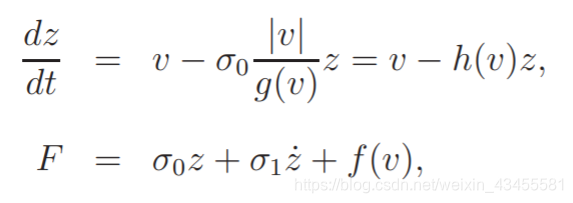
式中,
v
v
v是接触面的相对速度,
z
z
z是内摩擦状态,
F
F
F是预测的摩擦力。
与Dahl模型不同的是,LuGre模型有一个与速度相关的函数 g ( v ) g(v) g(v),而不是一个常数,一个额外的与微位移相关的阻尼系数 σ 1 \sigma_1 σ1,以及与宏观位移相关的粘滞摩擦力项 f ( v ) f(v) f(v)。
其中状态 z z z类似乎Dahl模型中的应变,可解释为平均鬓毛挠度, σ 0 \sigma_0 σ0为鬓毛刚度, σ 1 \sigma_1 σ1为鬓毛阻尼。
与宏观位移相关的粘滞摩擦力项
f
(
v
)
f(v)
f(v)被建模为:
f
(
v
)
=
σ
2
v
f(v)=\sigma_2 v
f(v)=σ2v
对于恒速情况,稳态摩擦力计算如下:
F
s
s
(
v
)
=
g
(
v
)
s
g
n
(
v
)
+
f
(
v
)
F_{ss}(v)=g(v)sgn(v)+f(v)
Fss(v)=g(v)sgn(v)+f(v)
其中
g
(
v
)
g(v)
g(v)为描述库伦摩擦力和Stribeck效应的函数,可被建模为:

式中,
F
s
F_s
Fs为静摩擦力,
F
c
F_c
Fc为库伦摩擦力,
F
c
≤
g
(
v
)
≤
F
s
F_c≤g(v)≤F_s
Fc≤g(v)≤Fs,参数
v
s
v_s
vs决定了
g
(
v
)
g(v)
g(v)接近
F
c
F_c
Fc的速度,指数
α
\alpha
α是一个经验值,与减速器类型有关,大约在0.5到2之间。
Stribeck速度与指数
α
\alpha
α对摩擦力的影响见下图,由此可见:Stribeck速度越高,速度端受Stribeck效应的影响范围越广;指数α影响衰减曲线的形状,衰减斜率与速度有关。

参考文献:

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









